

Интегрирующие звенья.
Интегрирующими звеньями называются такие звенья, поведение которых описывается дифференциальным уравнением вида :
![]()
здесь c(p)-полином , не выше , второй степени, удовлетворяющий условию c(0)=1.
В интегрирующих звеньях в установившемся режиме имеет место линейная зависимость между входной величиной и производной выходной величины.
1) Идеальное интегрирующее звено :
![]()
Пример: идеальный конденсатор. Передаточная функция такого звена:
![]()
![]() реакция звена на входные воздействия.
реакция звена на входные воздействия.
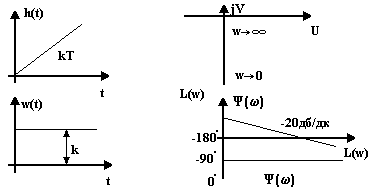
Частотные характеристики :
![]() , тогда
, тогда
АЧХ
:
![]()
ФЧХ
:
![]()
ЛАХ
:
![]()
Построим эти характеристики в виде графиков :
К этому классу относятся интегрирующие звенья с замедлением и изодромное звено.
Интегрирующее с замедлением представляет собой последовательное соединение интегрирующего и апериодического звена 1-го порядка.
Изодромное звено - параллельное соединение идеального интегрирующего и пропорционального звеньев.
Дифференцирующими называются такие звенья, у которых в установившемся режиме выходная величина пропорциональна производной от входной.
![]()
1) Идеальное дифференцирующее звено описывается дифференциальным уравнением вида :
![]()
2) Дифференциальное звено с замедлением :
(Tp+1)
![]()
Временные характеристики :
![]()
Функция Веса :
![]()
Частотные характеристики :
частотно-передаточная функция получена путем замены комплексной переменной S на jw :
![]()
АЧХ
: ![]()
ФЧХ
: ![]()
ЛАХ
: ![]()
![]() ;
;
![]() ;
<1/T(наклон
20 дб/дк)
;
<1/T(наклон
20 дб/дк)
Передаточные функции линейных систем.
В общем случае дифференциальное уравнение любой САР могут быть разбиты на две группы : одна из них описывает работу регулятора, а вторая - объекта регулирования, по этому структурная схема любой САР может быть всегда сведена к виду :

![]() -
передаточная функция регулятора
-
передаточная функция регулятора
![]() -
передаточная функция объекта регулирования
-
передаточная функция объекта регулирования
![]() -
передаточная
функция по возмущению
-
передаточная
функция по возмущению
![]() ;
;
![]() ;
;![]()
Здесь b (s) и c(S) некоторые многочлены от комплексной переменной S . Для такой САР введено понятие разомкнутой передаточной функции системы :
![]() ,
,
где Y(S) и X(S) изображение регулируемой величины и сигнала ошибки.
Функция W(S) определяется при нулевых начальных значениях X(t) и Y(t) и их производных и при отсутствии возмущения f (t)=0.
Т. к. разомкнутая САР состоит из двух последовательно соединенных звеньев, то передаточная функция ее будет равна :
![]()
Тогда
в общем виде передаточную функцию
разомкнутой системы можно записать в
виде: 
Полином c(S) называется характеристическим полиномом разомкнутой системы, а уравнение c(S)=0 - характеристическим уравнением разомкнутой системы.
Возьмем случай, когда один или несколько младших коэфициентов многочлена c(S) равны нулю, т.е.
![]() ,
тогда
,
тогда

Величина
![]() называется порядком астотизма
САР относительно задающего воздействия.
Обычно последнее выражение записывается
в стандартной форме при которой многочлены
в числителе и знаменателе имеют свободные
члены, равные 1.
называется порядком астотизма
САР относительно задающего воздействия.
Обычно последнее выражение записывается
в стандартной форме при которой многочлены
в числителе и знаменателе имеют свободные
члены, равные 1.
Тогда последнее выражение можно записать в виде :
![]() -коэффициент
усиления (передачи) разомкнутой системы
-коэффициент
усиления (передачи) разомкнутой системы

На
практике наиболее часто встречаются
случаи , когда
![]() . Такие системы называются статическими
САР. Когда
. Такие системы называются статическими
САР. Когда
![]() САР с астотизмом первого порядка. Когда
САР с астотизмом первого порядка. Когда
![]() - САР с астотизмом второго порядка.
- САР с астотизмом второго порядка.
Выражение Ф(S)=Y(S)/G(S) называется основной передаточной функцией замкнутой системы или главным оператором.G(S) изображение задающего воздействия. При вычислении главного оператора также полагаются нулевыми начальные значения Y(t) и G(t) и их производные f (t) не учитываются. В этом случае структурную схему САР можно представить в виде :

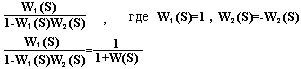
Это соединение с единичной отрицательной обратной связью, для которой можно записать :

Здесь
a(S)
называется характеристическим полиномом
замкнутой системы, а уравнение a(S)=0
характеристическим уравнением замкнутой
системы. Формула
![]() , где F(S)
-изображение
возмущающего воздействия - называется
передаточной функцией замкнутой системы
по возмущению. При расчете ее задающее
воздействие не учитывается.
, где F(S)
-изображение
возмущающего воздействия - называется
передаточной функцией замкнутой системы
по возмущению. При расчете ее задающее
воздействие не учитывается.
В результате, общая структурная схема САР может быть приведена к виду :
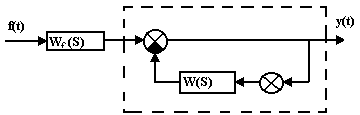
Фрагмент схемы , обведенные пунктиром , представляет собой соединение с положительной обратной связью, можно представить :
В результате передаточная функция замкнутой системы по возмущению будет равна :
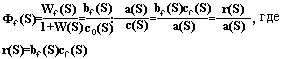
Т. к. система линейна, то при одновременном наличии задающего воздействия и возмущения по принципу наложения можно записать, что изображение выходной величины :
![]()
Из последнего уравнения можно получить ДУ САР путем перехода к оригиналу:

a(p),y(t),r(p)-символические полиномы.
Уравнение
:![]() определяет функцию системы для ошибки.
определяет функцию системы для ошибки.
Представим структурную схему САР в виде :
