

Последовательное корректирующее устройство.
Наибольшее распространение получили электрические последовательные КУ, состоящие из R, L, C элементов. Основными среди этих устройств являются:
пассивное интегрируемое звено (замедляющее звено), описываемое передаточной функцией следующего вида:
 (46)
(46)
Это звено имеет следующие характеристики:

п
 ассивное
дифференцирующее звено (форсирующее
звено), описываемое той же передаточной
функции.
ассивное
дифференцирующее звено (форсирующее
звено), описываемое той же передаточной
функции.
 (47)
(47)

интегро-дифференцирующее звено является комбинация двух рассмотренных выше звеньев. Его передаточная функция:
![]() (48)
(48)

П араллельное
корректирующее устройство.
араллельное
корректирующее устройство.
 Параллельно
основному сигналу чаще всего включают
интегрирующие или дифференцирующие
звенья.
Параллельно
основному сигналу чаще всего включают
интегрирующие или дифференцирующие
звенья.
![]()
![]()

![]() ;
(48)
;
(48)![]()
Интегрирующие звенья при этом образуют изодромное устройство, применяемое для повышения точности САУ в установившемся режиме.
Дифференцирующие звенья вводят для повышения запаса устойчивости, точности и быстродействия.
Дополнительно обратная связь.
Они могут быть жесткими и гибкими.
Жестко обратная связь действует всё время, гибко обратная связь только при изменении выходной координаты охватываемого звена. В цепи жесткой обратной связи ставится позиционное звено, в цепи гибкой - дифференцирующее. Интегрирующие звенья в цепи обратной связи не ставятся.
ПРИМЕР:
Рассмотрим обхват гибкой и жесткой обратной связи.
Безынерционное звено
для жестко обратной связи передаточная функция будет иметь вид:
 (49);
(49);
![]()
В результате обхвата такой связи коэффициент передачи уменьшится.
В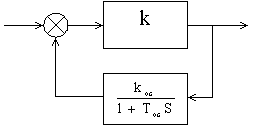 динамическом отклонении это введение
эквивалентно включению в систему
пассивного дифференцирующего форсирующего
звена.
динамическом отклонении это введение
эквивалентно включению в систему
пассивного дифференцирующего форсирующего
звена.
2) для гибко обратной связи передаточная функция будет иметь вид:
 (50)
(50)
В динамическом отношении введение этой
обратной связи эквивалентно включению
в систему пассивного замедляющего
звена.
динамическом отношении введение этой
обратной связи эквивалентно включению
в систему пассивного замедляющего
звена.
Постановка задач синтеза линейной системы.
До сих пор рассмотренные вопросы теории ТАР связаны с анализом готовых систем с целью определения их свойств и пути их улучшения. Наиболее сложной и наиболее важной задачей для практики является задача синтеза систем. Она заключается в определении и реализации таких динамических и статических характеристик, которые при заданных ограничениях наилучшим способом следующих этапов:удовлетворяют поставленным требованиям. Обычно её решение состоит из
изучение объекта регулирования условий его работы и основные воздействия,
формирование требований, предъявляемых к САР,
выбор принципа регулирования первоначальной схемы регулятора,
выбор элементов р6егулятора с учетом их мощности и надежности,
выбор и расчет элементов регулятора и их параметров на основе требований, предъявляемых к статическим и динамическим свойствам системы,
экспериментальные исследования Сар и её отдельных частей и внесение корректив,
изготовление и монтаж САР,
наладка САР в реальных условиях её работы,
опытная эксплуатация САР.
По отношению к основе синтеза в настоящее время имеются разные точки зрения.
Мы под синтезом будем понимать инженерную задачу, сводящуюся к такому построению САР, при котором обеспечивается техническое выполнение к ней. В этом случае необходимо получить, во-первых, требуемую точность, а во-вторых, приемлемый характер переходных процессов.