

5.2.3 Типові елементи механізмів подач
У коробках подач різних верстатів, як і в коробках швидкостей, зустрічаються однакові по конструкції механізми.
Для перетворення обертального руху в поступальний використовуються гвинтові та рейкові пари.
Гвинтові пари. Гвинт, вкручуючись в гайку, робить одночасно обертальний і поступальний рухи, тобто гвинтова пара є найпростішим механізмом для перетворення обертального руху в поступальний. Якщо гвинт обертається, але уздовж своєї осі переміщатися не може, то гайка буде переміщатися по гвинту (рисунок 5.11) [10].
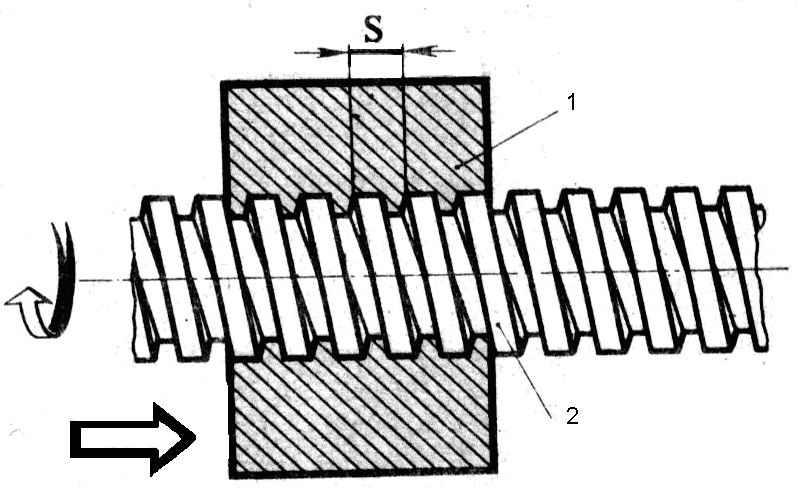
Рисунок 5.11 - Гвинтова пара: 1 – гайка, 2 – гвинт.
Гвинтові
пари (гвинт — гайка) широко застосовуються
в механізмах верстатів для перетворення
обертального руху в поступальний:
переміщення каретки супорта за допомогою
ходового гвинта при нарізанні різьб,
поперечна подача супорта за допомогою
гвинта поперечної подачі і т.д. За один
оберт гвинт переміщується в гайці (або
гайка по гвинту) на один крок S,
за n обертів гвинта переміщення гвинта
або гайки складе S![]() n
мм. Якщо гвинт багатозахідний, то за n
обертів гвинта осьове переміщення
складе n•K
мм, де К
— число заходів гвинта.
n
мм. Якщо гвинт багатозахідний, то за n
обертів гвинта осьове переміщення
складе n•K
мм, де К
— число заходів гвинта.
Ходові гвинти мають, як правило, трапецоїдну нарізь. Гайка гвинтової пари може бути цільною або рознімною (рис.5.12).
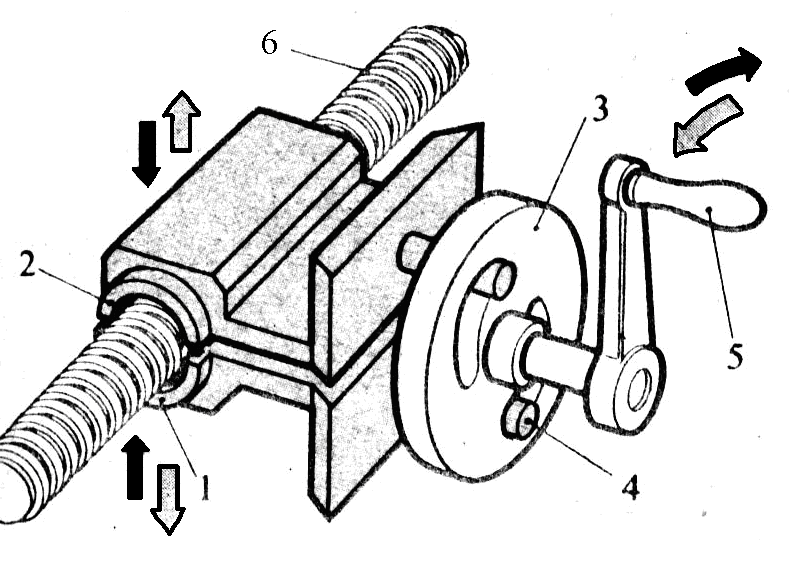
Рисунок 5.12 - Рознімна гайка: 1, 2 — напівгайки, 3 — диск зі спіральними прорізами, 4 — палець напівгайки, 5 — руків’я, 6 – ходовий гвинт.
Рознімна гайка складається з двох половинок (напівгайок) 1 і 2, що при включенні поступального руху замикаються на гвинті. У токарно-гвинторізних верстатів така рознімна гайка знаходиться у фартуху супорту. Замикання і розмикання напівгайок здійснюється за допомогою диска із спіральними прорізами і пальців 4, зв'язаних з напівгайками. Диск 3 повертають руків’ям 5.
Рейкова пара являє собою зубчасте колесо в сполученні з рейкою (рис.5.13), [10].
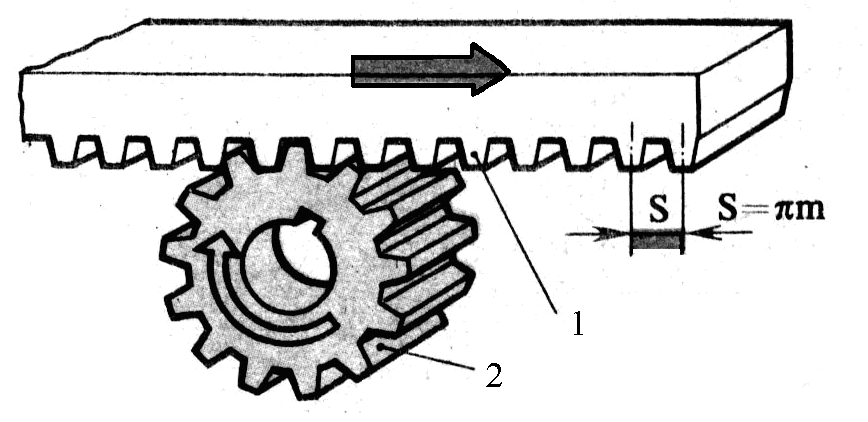
Рисунок 5.13 - Рейкова пара: 1 – рейка, 2 – зубчасте колесо.
Цей механізм також служить для перетворення обертального руху в поступальний (зубчасте колесо, що обертається, буде відштовхувати рейку, змушуючи її рухатись поступально. Якщо обертати зубчасте колесо по закріпленій рейці, то одночасно воно буде переміщатися поступально по рейці. При повороті зубчастого колеса на один зуб поступальне переміщення буде дорівнювати одному кроку, тобто πm. Якщо рейкове зубчасте колесо обертається зі швидкістю n об/хв, то за цей час шлях поступального руху рейки складе n•π•m мм.
У токарно-гвинторізних верстатах рейкова пара застосовується для здійснення автоматичного повздовжнього переміщення каретки супорта, і у механізмах керування.
5.3 Хід виконання роботи
1. Розрахувати передатне відношення пасової передачі на верстаті 16К20.
2. Ознайомитись з кінематичною схемою токарно-гвинторізного верстату 16К20.
3. Ознайомитись з основними механізмами коробки швидкостей токарно-гвинторізного верстату 16К20.
4. Ознайомитись з механізмами для перетворення обертального руху в поступальний, що застосовуються в верстаті 16К20.
5. Користуючись заданими кінематичними схемами верстатів розрахувати вихідні частоти обертання шпинделя верстату.