

Властивості керованих об’єктів
Основними властивостями керованих об’єктів є ємкість, самовирівнювання, запізнення, тривалість і швидкість розгону.
Ємкість керованого об’єкта – це запас накопиченої енергії або накопиченої в об’єкті речовини. Чим більше ємкість об’єкта, тим повільніше при інших рівних умовах буде змінюватись керована величини при збурюючих впливах і навпаки.
Ємкість кожного об’єкта розглядається з боку споживання і з боку надходження. Ємкість в першому випадку визначається характеристиками керованого середовища, в – другому характеристиками речовини або енергії, яка впливає на керовану величину. Наприклад, кількість теплоти, яка міститься в теплоносії нагрівача, є ємкістю з боку подачі, а кількість теплоти, що знаходиться в комунікації після нагрівача, - ємкістю з боку споживання.
Самовирівнюванням керованого процесу називається властивість керованого об’єкту після виникнення збурюючого впливу прагнути переходити в стан рівноваги без зовнішнього втручання. Об’єктами з самовирівнюванням є теплові технологічні апарати підприємств ресторанного господарства, в яких при зміні потужності нагрівальних елементів температура рідини (повітря) встановлюється на нове постійне значення.
В об’єктах без самовирівнювання рівновага, порушена в наслідок зміни керованої величини, не відновлюється (наприклад в резервуарі, з якого в постійній кількості відкачується рідини, а приток її в резервуар змінюється).
З моменту збурюючої дії керована величина змінюється не відразу, а через певний час, який характеризує запізнення процес в об’єкті. Розрізняють запізнення передаточне і перехідне.
Передаточне запізнення – час на протязі якого керована величина не змінюється не дивлячись на виникнення збурюючої дії.
Передаточне запізнення залежить від навантаження і ємкості об’єкта: чим більше навантаження, тим менше передаточне запізнення; час передаточного запізнення зменшується із зменшенням ємкості об’єкта.
Запізнення, що залежить від теплових,гідравлічних і інших опорів між ємкостями об’єкта, називається переходним. Переходне запізнення в теплових апаратах обумовлюється так званим тепловим опором, який залежить від умов теплообміну.
Час розгону об’єкту - це період, протягом якого керована величина при скачкоподібній максимальній збурюючій дії змінюється від нуля до заданого значення при умові навантаження об’єкта і сталості швидкості зміни керованої величини на протязі цього часу.
Типові ланки автоматичних систем
Системи автоматичного регулювання складаються з елементів — ланок, кожна з яких може мати свою електричну схему, фізичні принципи дії, різне конструктивне оформлення й характеризуватись цілком визначеним зв’язком між вхідною й вихідною величинами. На роботу системи з погляду аналізу її стійкості й розрахунку перехідних процесів впливає залежність між вхідною, й вихідною величинами. Якщо класифікувати з цього погляду ланки систем автоматичного регулювання, то виявляється порівняно невелика кількість залежностей, які охоплюють більшість реальних ланок у схемах автоматичного регулювання. Далі розглядатимуться найхарактерніші ланки.
Динамічні характеристики ланок можна повністю описати їх диференціальними рівняннями. Однак при аналізі стійкості систем та їх динаміки широко застосовують частотні методи, тому ці методи використовують також при визначенні характеристик
ланок.
Величина, зворотня часу розгону, являє собою швидкість розгону.
При дослідженні динамічних властивостей елементів користуються передаточною функцією ланки, яка являє собою відношення операторного зображення вихідної величини до операторного зображення вхідної величини.
Лінійні ланки.
Пропорційна ланка. Пропорційною називається ланка, в якій вихідна величина пропорційна вхідній, тобто в символічній формі:
![]()
Передаточний коефіцієнт такої ланки:
![]()
Прикладом подібної ланки може бути важіль, редуктор (якщо знехтувати мертвим ходом і пружністю деталей), подільник напруги, транзистор, постійний резистор, трансформатор.
При подачі на вхід такої ланки стрибкоподібного сигналу вихідна величина без запізнювання повторює зміну вхідної величини в іншому масштабі. Такі ланки дістали назву безінерційних (рис. 27). Вони рівномірно пропускають сигнали всіх частот, бо передаточний коефіцієнт не залежить від частоти.

Рис 27 - Пропорційні ланки
Аперіодична ланка. Аперіодичною називається ланка,в якій при разовому впливі на вході вихідна величина аперіодично прагне до нового установленого значення. Інколи ця ланка ще називається інерційною.
Приклади аперіодичних (інерційних) ланок є контури LR,RC,електродвигун постійного струму, електронагрівач.
Інтегруючою називають таку ланку, у якої вихідна величина є інтегралом від вхідної:
![]()
Продиференціювавши рівняння, дістанемо:
![]()
Інтегруюча ланка. Інтегруючою ідеальною називається ланка, в якій вихідна величина пропорційна інтегралу від вхідної величини.
Передаточний коефіцієнт:
![]()

Рис 28 - Інтегруючі ланки
Можна навести такі приклади інтегруючих ланок:
А. Конденсатор, заряджений струмом (рис. 28, а). Вхідна
величина — струм , вихідна — напруга на конденсаторі
Б. Ідеальний дросель при R = 0 (рис. 28,6). Вхідна величина—напруга U, вихідна — струм I.
В.. Будь-який механічний пристрій, в якому вхідною величиною є швидкість Ω, а вихідною переміщення Z (рис. 28, в).
Диференційна ланка. Ідеальною диференційною називається ланка, в якій вихідна величина пропорційна похідній в часі від вхідної,тобто вихідна величина пропорційна швидкості зміни вхідної.
Передавальний коефіцієнт К=А вих / А вх =JwК.
Коливальна ланка. Коливальною називається ланка, в якій при зміні вхідної величина вихідна величина прагне до нового значення, здійснюючи відносно неї коливання.
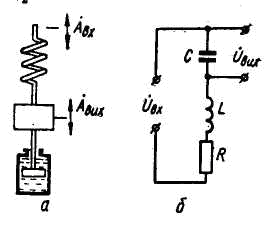
Рис 29 - Коливальні ланки
Рівняння передаточного коефіцієнта коливальної ланки має вигляд:
![]()
де ωо — частота власних коливань; ε — ступінь заспокоєння коливань (демпфірування).
До ланок такого типу належать механічні коливальні системи, до складу яких входять елементи, що мають масу, пружність і в’язке тертя (демпфірування) (рис. 29, а), і електричні коливальні контури, до складу яких входять індуктивність L, ємність С і активний опір R (рис. 29, б).
Запізнююча ланка. Запізнюючою називається ланка,яка передає сигнал без змін,але при цьому вихідний сигнал по відношенню до вхідного запізнюється на постійну величину Т.Рівняння такої ланки має вигляд
Авих=
кАвих(т-Т)![]()