

4 Методы обработки экспериментальных динамических характеристик средств измерений
Методы обработки экспериментальных ДХ СИ относятся к косвенным методам определения ДХ СИ и разделяются, как было указано выше, на структурно-параметрические и параметрические методы.
Как отмечается в [2] все методы установления математических моделей объектов по их экспериментальным динамическим характеристикам относятся к некорректным методам.
Каждый из существующих методов имеет свои преимущества, недостатки и область использования, т. е. универсального метода не существует. Выбор конкретного метода обработки экспериментальных динамических характеристик зависит от установленной точности определения нормируемых динамических характеристик, трудоемкости проведения эксперимента, необходимости или возможности автоматизации процесса определения, затрат на проведение эксперимента и обработку экспериментальных данных и т. д.
Рассмотрим некоторые из них.
4.1 Метод предварительной оценки и контроля динамических характеристик си
Данный метод приведен в приложении 4 к ГОСТ 8.508 и относится к структурно-параметрическим методам.
В соответствии с
данным стандартом устанавливают вид и
порядок (т. е. структуру) динамической
модели линейных стационарных СИ не выше
второго
![]() .
.
Структуру динамической модели СИ определяют с помощью оценки вспомогательных параметров, функционально связанных с коэффициентами полных динамических характеристик.
Для оценки
вспомогательных параметров с ГИС на
вход ИСИ подают кусочно-постоянный
испытательный сигнал, изменяющий свои
значения через интервал времени
![]() ,
и считывают выходной сигнал в моменты
времени
,
и считывают выходной сигнал в моменты
времени![]() .
.
Для инерционных
СИ порядка не выше второго значения
выходного сигнала в моменты времени
![]() связаны со значениями этого сигнала в
предыдущие моменты времени, а также со
значениями входного сигнала через
вспомогательные параметры уравнением
связаны со значениями этого сигнала в
предыдущие моменты времени, а также со
значениями входного сигнала через
вспомогательные параметры уравнением
![]() ,
,
где
![]() - вспомогательные параметры.
- вспомогательные параметры.
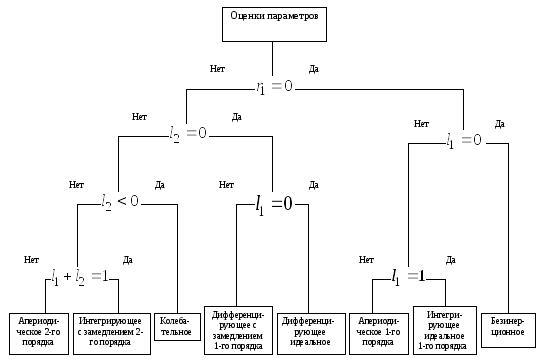
Вспомогательные
параметры
![]() оценивают по специальной методике и
алгоритму обработки результатов
эксперимента и затем используют для
установления вида дифференциального
уравнения ИСИ в последовательности,
приведенной на рисунке 4.1. Кроме того,
оценивают средние квадратические
отклонения вспомогательных параметров,
а именно
оценивают по специальной методике и
алгоритму обработки результатов
эксперимента и затем используют для
установления вида дифференциального
уравнения ИСИ в последовательности,
приведенной на рисунке 4.1. Кроме того,
оценивают средние квадратические
отклонения вспомогательных параметров,
а именно![]() ,
которые используют при проверке
выполнений условий на значения
вспомогательных параметров. Например,
,
которые используют при проверке
выполнений условий на значения
вспомогательных параметров. Например,![]() ,
если нуль попадает в интервал
,
если нуль попадает в интервал![]() ,
и
,
и![]() ,
если единица попадает в интервал
,
если единица попадает в интервал![]() .
.
После установления структуры динамической модели ИСИ определяют значения входящих в нее параметров и оценивают точность их определения.
Как видно из рисунка 4.1, данный метод позволяет определить структуру не всех, а только восьми динамических моделей СИ из пятнадцати, образующих типовые динамические модели (см. таблицу 1.1 ). Кроме того, не приводятся расчетные формулы для определения параметров динамических моделей СИ, что создает дополнительные трудности реализации на практике данного метода.
4.2 Аппроксимация экспериментальной переходной характеристики конечным числом показательных функций
Данный метод может являться структурно-параметрическим или параметрическим в зависимости от исходных данных и последовательности его реализации.
Приведем математическое обоснование метода.
Если ставиться
задача приближения функции
![]() на некотором интервале времени переходного
процесса суммой конечного числа
экспоненциальных членов, то в случае
отсутствия кратных корней передаточная
функция ИСИ будет иметь следующий вид
на некотором интервале времени переходного
процесса суммой конечного числа
экспоненциальных членов, то в случае
отсутствия кратных корней передаточная
функция ИСИ будет иметь следующий вид
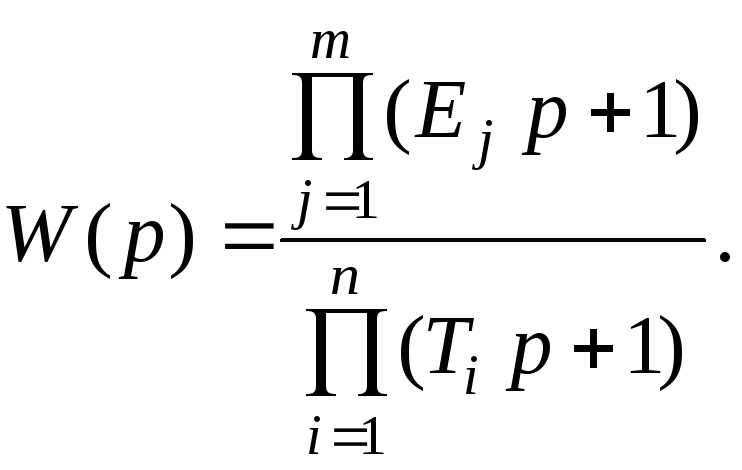 (4.1)
(4.1)
Из условий физической
реализуемости СИ постоянные времени
![]() и
и![]() должны быть вещественными и положительными,
а порядок числителя выражения (4.1) не
должен превышать порядок знаменателя,
т. е.
должны быть вещественными и положительными,
а порядок числителя выражения (4.1) не
должен превышать порядок знаменателя,
т. е.![]() .
.
При этом уравнение переходной функции имеет вид
![]() ,
(4.2)
,
(4.2)
где
![]() -
весовой коэффициент соответствующей
показательной функции.
-
весовой коэффициент соответствующей
показательной функции.
Рассмотрим на конкретных примерах реализацию метода аппроксимации переходной характеристики конечным числом показательных функций, приведенного, в частности, в [3, с. 150].
Простейшим случаем
является передаточная функция ИСИ
второго порядка, т. е. с
![]() =2,
для поиска постоянных времени которой
производится следующая последовательность
действий.
=2,
для поиска постоянных времени которой
производится следующая последовательность
действий.
1. Вводится
вспомогательная функция
![]() .
.
2. Из зарегистрированной
переходной характеристики ИСИ выбирают
четыре равноотстоящих по времени
![]() значения
значения![]() (см. рисунок 4.2) и формируют таблицу
отсчетов (см. таблицу 4.1).
(см. рисунок 4.2) и формируют таблицу
отсчетов (см. таблицу 4.1).
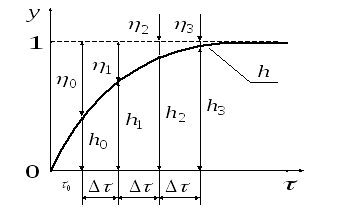
Рисунок 4.2
Таблица 4.1
|
Время переходного процесса |
Значение переходной характеристики |
Значение функции
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. Решается система
из двух уравнение относительно
![]() и
и![]() вида
вида

4. Находятся корни
![]() и
и![]() квадратного уравнения:
квадратного уравнения:
![]()
Для продолжения
вычислений необходимо чтобы корни
![]() были вещественными и положительными,
а также удовлетворяли условию
были вещественными и положительными,
а также удовлетворяли условию
![]()
5. Вычисляются
постоянные времени
![]() по формуле
по формуле
![]()
6. Решается
относительно неизвестных
![]() система уравнений вида
система уравнений вида

7. Находятся весовые коэффициенты переходной функции (4.2) по формуле
![]() .
.
Задача упрощается,
если за время первого отсчета
![]() принять время
принять время![]() ,
тогда величины
,
тогда величины![]() будут равны искомым весовым коэффициентам.
будут равны искомым весовым коэффициентам.
Нахождение значений
постоянных времени числителя передаточной
функции (4.1) производится по выражениям,
вид которых зависит от значения
![]() .
.
В таблице 4.2
приведены формулы связи постоянных
времени с весовыми коэффициентами для
различных значений
![]() .
.
Таблица 4.2
|
Весовой коэффициент |
Вид весового коэффициента в зависимости от
значения
| ||
|
|
|
| |
|
|
|
|
|
|
|
|
|
|

Поскольку числовые
значения постоянных времени
![]() и весовых коэффициентов
и весовых коэффициентов![]() уже вычислены соответственно в п. 5 и
п. 7, то по данным таблицы 4.2 определяют
значения постоянных времени
уже вычислены соответственно в п. 5 и
п. 7, то по данным таблицы 4.2 определяют
значения постоянных времени![]() при заданном значении
при заданном значении![]() или путем последовательного перебора
значений
или путем последовательного перебора
значений![]() ,
если оно не было задано.
,
если оно не было задано.
Из числа типовых
динамических моделей СИ (см. таблицу
1.1) передаточной функции (4.1) при
![]() соответствуют динамические модели
(структуры) № 3, № 4, № 5 и № 6.
соответствуют динамические модели
(структуры) № 3, № 4, № 5 и № 6.
Если структура динамической модели конкретного ИСИ неизвестна, то данный метод реализуется путем последовательного перебора в порядке усложнения указанных моделей и определения значений соответствующих параметров до тех пор, пока фактическая погрешность установленных динамических характеристик станет меньше заданной. В этом случае метод аппроксимации переходной характеристики конечным числом показательных функций будет называться структурно-параметрическим.
Если же структура динамической модели ИСИ известна и определяются только значения постоянных времени, то данный метод будет являться параметрическим.
При
![]() =3
поиск постоянных времени передаточной
функции (4.1) ИСИ по данному методу
производится в той же последовательности,
что и для
=3
поиск постоянных времени передаточной
функции (4.1) ИСИ по данному методу
производится в той же последовательности,
что и для![]() =2,
однако расчетные формулы имеют несколько
более сложный вид. Рассмотрим эту
последовательность действий.
=2,
однако расчетные формулы имеют несколько
более сложный вид. Рассмотрим эту
последовательность действий.
1. Вводится
вспомогательная функция
![]() .
.
2. Из зарегистрированной
переходной характеристики ИСИ выбирают
шесть равноотстоящих по времени
![]() значения
значения![]() и формируют таблицу отсчетов (см. таблицу
4.3).
и формируют таблицу отсчетов (см. таблицу
4.3).
Таблица 4.3
|
Время переходного процесса |
Значение переходной характеристики |
Значение функции
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
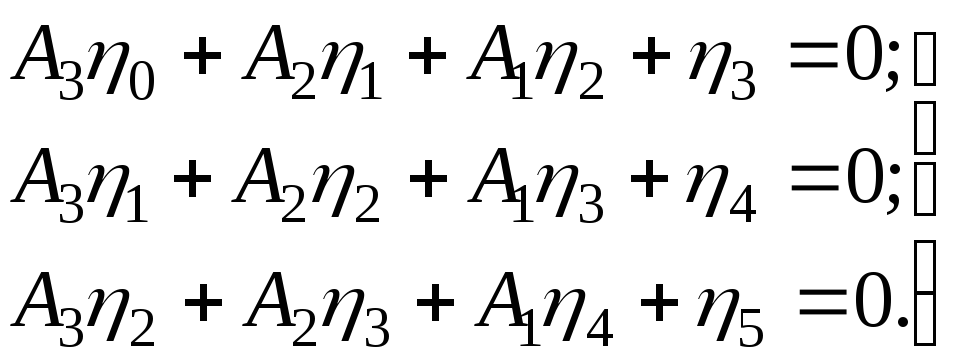
3. Решается система
из трех уравнение относительно
![]() ,
,![]() и
и![]() вида
вида
4. Находятся корни
![]() ,
,![]() и
и![]() кубического уравнения:
кубического уравнения:
![]()
Для продолжения
вычислений необходимо чтобы корни
![]() были вещественными и положительными,
а также удовлетворяли условию
были вещественными и положительными,
а также удовлетворяли условию
![]()
5. Вычисляются
постоянные времени
![]() по формуле
по формуле
![]()
6. Решается
относительно неизвестных
![]() система уравнений вида
система уравнений вида

7. Находятся весовые коэффициенты переходной функции (4.2) по формуле
![]() .
.
Задача упрощается,
если за время первого отсчета
![]() принять время
принять время![]() ,
тогда величины
,
тогда величины![]() будут равны искомым весовым коэффициентам.
будут равны искомым весовым коэффициентам.
Нахождение значений
постоянных времени числителя передаточной
функции (4.1) производится по выражениям,
вид которых зависит от значения
![]() .
.
В таблице 4.4
приведены формулы связи постоянных
времени с весовыми коэффициентами для
различных значений
![]() .
.
Как было отмечено
выше, типовые динамические модели СИ
имеют порядок не выше второго, т. е.
![]() (см. таблицу 1.1). Однако некоторые СИ
должны нормироваться по условиям
применения динамическими моделями
более сложных порядков. Примерами таких
СИ являются датчики температур газовых
потоков, используемых при исследованиях,
испытаниях и эксплуатации изделий
авиационной техники. В соответствии с
ОСТ 1 00418 их динамические модели могут
иметь порядок до
(см. таблицу 1.1). Однако некоторые СИ
должны нормироваться по условиям
применения динамическими моделями
более сложных порядков. Примерами таких
СИ являются датчики температур газовых
потоков, используемых при исследованиях,
испытаниях и эксплуатации изделий
авиационной техники. В соответствии с
ОСТ 1 00418 их динамические модели могут
иметь порядок до![]() .
.
Таблица 4.4
|
|
Вид
весового коэффициента в зависимости
от значения
| ||
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
Поскольку числовые
значения постоянных времени
![]() и весовых коэффициентов
и весовых коэффициентов![]() уже вычислены соответственно в п. 5 и
п. 7, то по данным таблицы 4.4 определяют
значения постоянных времени
уже вычислены соответственно в п. 5 и
п. 7, то по данным таблицы 4.4 определяют
значения постоянных времени![]() при заданном значении
при заданном значении![]() или путем последовательного перебора
значений
или путем последовательного перебора
значений![]() ,
если оно не было задано.
,
если оно не было задано.
Дальнейшие примеры
аппроксимации на большее число
![]() понятен. Если необходимо найти
понятен. Если необходимо найти![]() постоянных времени
постоянных времени![]() передаточной функции ИСИ вида (4.1), то
необходимо иметь не менее
передаточной функции ИСИ вида (4.1), то
необходимо иметь не менее![]() равноотстоящих отсчетов из переходной
характеристики, т. е.
равноотстоящих отсчетов из переходной
характеристики, т. е.![]() .
.
Если при вычислениях
корни
![]() не получились вещественными и
положительными, а также не удовлетворяют
условию
не получились вещественными и
положительными, а также не удовлетворяют
условию![]() ,
то дальнейшие вычисления следует
прекратить и необходимо произвести
следующие процедуры:
,
то дальнейшие вычисления следует
прекратить и необходимо произвести
следующие процедуры:
а) повторить заново
расчеты, изменив при этом
![]() и (или)
и (или)![]() ;
;
б) более тщательно
произвести отсчеты
![]() ,
возможно они были получены с недопустимо
большой погрешностью;
,
возможно они были получены с недопустимо
большой погрешностью;
в) произвести операции сглаживания или фильтрации помех в экспериментальных данных, из которых составляется таблица отсчетов;
г) перейти к другой структуре динамической модели ИСИ.
Основным недостаткам
данного метода является высокая
чувствительность к погрешностям, с
которыми определяются отсчеты из
переходной характеристики и значения
![]() и
и![]() .
Поэтому перед началом применения данного
метода необходимо производить процедуры
уменьшения погрешностей в отсчетах,
особенно при использования метода для
больших значений
.
Поэтому перед началом применения данного
метода необходимо производить процедуры
уменьшения погрешностей в отсчетах,
особенно при использования метода для
больших значений![]() .
.
Вторым недостатком
является аппроксимация переходной
характеристики переходной функцией
вида (2) только на интервале времени от
![]() до
до![]() .
Вне данного интервала времени переходного
процесса поведение функции
.
Вне данного интервала времени переходного
процесса поведение функции![]() относительно переходной характеристики
неопределенно.
относительно переходной характеристики
неопределенно.
К недостаткам можно также отнести ограниченный класс динамических моделей ИСИ, на который распространяется данный метод, что видно из (4.1).
Преимуществами метода являются достаточная простота математических формул и возможность автоматизации процесса определения постоянных времени ИСИ.
Область применения
данного метода – определение параметров
динамически моделей ИСИ вида (4.1) при
![]() .
.