

8 Обработка результатов наблюдений при определении динамических характеристик средств измерений
В соответствии с
ГОСТ 8.508 при существенной случайной
составляющей погрешности динамические
характеристики определяют посредством
обработки серии
![]() наблюдений. Число наблюдений
наблюдений. Число наблюдений![]() при
этом должно быть не менее трех и не более
десяти.
при
этом должно быть не менее трех и не более
десяти.
На рисунке 8.1 для примера изображены серия из трех наблюдений выходного сигнала ИСИ при определении переходной характеристики, содержащего случайную составляющую погрешности.
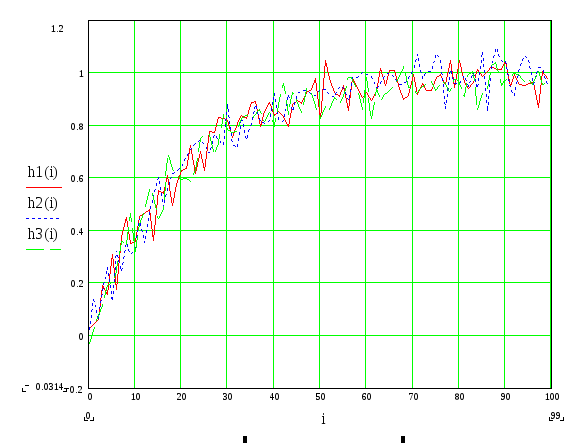
Рисунок 8.1 – Серия из трех наблюдений выходного сигнала ИСИ
Обработку результатов наблюдений удобно производить с использованием таблицы наблюдений, которая для рассматриваемого случая может иметь следующий вид (см. таблицу 8.1).
Таблица 8.1 – Таблица наблюдений
|
|
Время
переходного процесса
| |||||
|
0 |
10 |
20 |
30 |
40 |
50 | |
|
|
0,0269 0,0219 - 0,0314 |
0,3588 0,3314 0,3154 |
0,6267 0,6419 0,5898 |
0,8176 0,8826 0,7787 |
0,8369 0,9195 0,7915 |
0,8256 0,9337 0,8212 |
|
|
0,0053 |
0,3352 |
0,6195 |
0,8261 |
0,8493 |
0,8602 |
|
|
60 |
70 |
80 |
90 |
100 |
|
|
0,9257 0,9908 0,9839 |
0,9916 1,013 0,9392 |
1,0448 0,958 0,9683 |
1,0414 1,0477 0,9738 |
0,9771 0,9528 0,9679 |
|
|
0,9668 |
0,9813 |
0,9904 |
1,0209 |
0,9659 |
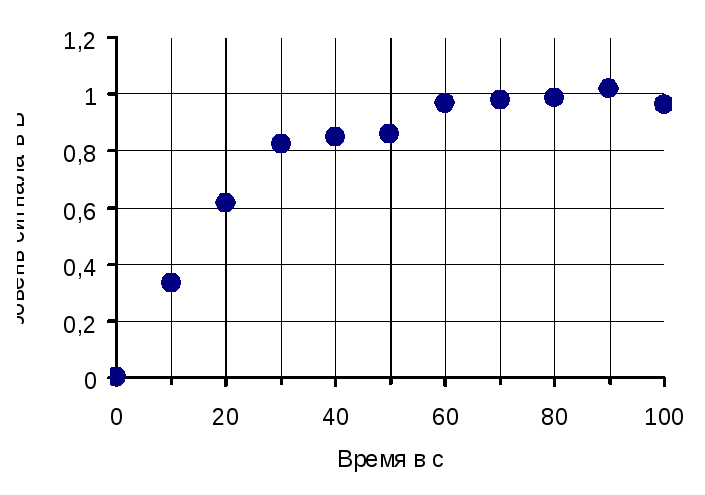
Рисунок 5.2 –Результат осреднения серии из трех наблюдений
выходного сигнала ИСИ
Если измерения выходного сигнала ИСИ проводились в одинаковых условиях и с одинаковой тщательностью, то они заслуживают одинакового доверия. Стремясь приблизиться к истинному значению измеряемой характеристики, вычисляют среднее арифметическое значение результатов наблюдений по формуле:
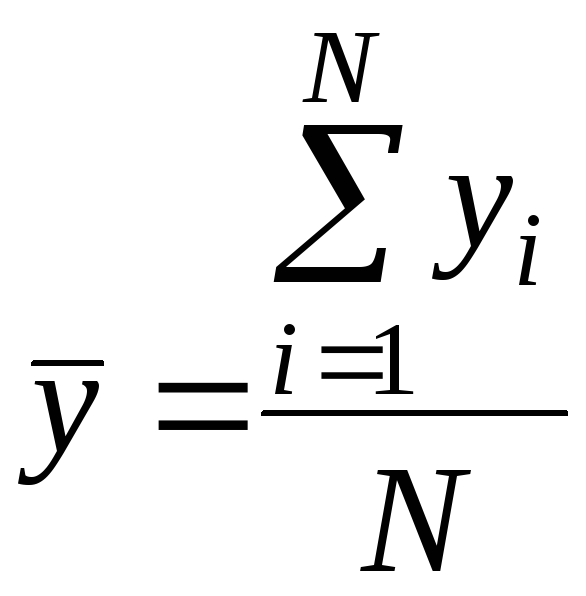 ,
,
где
![]() - среднее арифметическое значение
результата наблюдения;
- среднее арифметическое значение
результата наблюдения;
![]() -
результат
-
результат
![]() -го
наблюдения;
-го
наблюдения;
![]() -
число наблюдений.
-
число наблюдений.
В таблице 8.1
приведены результаты вычисления средних
арифметических значений
![]() результатов трех наблюдений в различное
время переходного процесса, а на рисунке
8.2 – их графическое изображение.
результатов трех наблюдений в различное
время переходного процесса, а на рисунке
8.2 – их графическое изображение.
Следует заметить,
что значения
![]() ,
приведенные в таблице 8.1, уже могут
использоваться как значения из таблицы
отсчетов для определения динамических
характеристик по какому-либо методу.
,
приведенные в таблице 8.1, уже могут
использоваться как значения из таблицы
отсчетов для определения динамических
характеристик по какому-либо методу.
9 Критерии адекватности динамических характеристик средств измерений
Общепринятых критериев, характеризующих соответствие математического описания (функции) найденной динамической характеристики СИ опытным данным, в настоящее время не существует. Однако большинство исследователей вводят критерии, аналогичные дисперсии и выражающие среднеквадратическое отклонение в абсолютных или относительных величинах.
В общем случае для исследователей представляет интерес величина отклонения значений, которые наблюдались, от найденной функции. Кроме того, метрологов может интересовать величина приведенной погрешности наблюдений и приведенной погрешности получения функции.
Таким образом, можно выделить следующие наиболее широко применяемые критерии [6]:
- отклонение значений, которые наблюдались, от найденной функции
![]() ;
;
- погрешность наблюдения значений
 ;
;
- приведенная погрешность наблюдения значений
 ;
;
- отклонение функции от значений, которые наблюдались
![]() ;
;
- погрешность получения функции
 ;
;
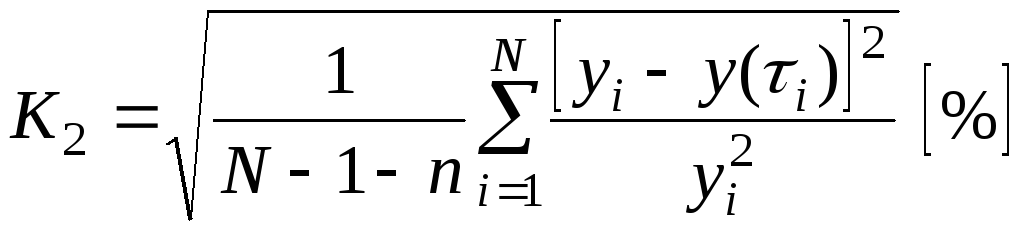
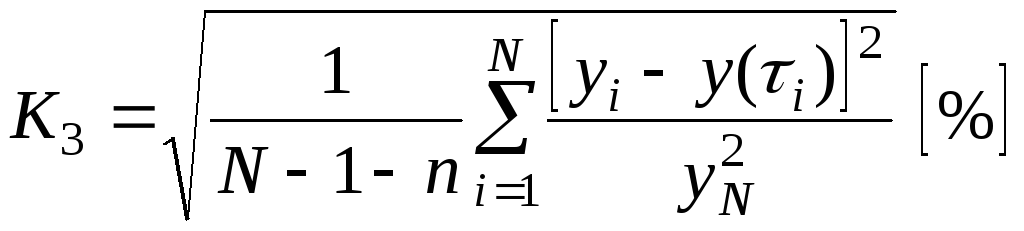
- приведенная погрешность получения функции
 .
.
В приведенных критериях использованы следующие обозначения:
![]() - количество точек
выборки из таблицы отсчетов;
- количество точек
выборки из таблицы отсчетов;
![]() - экспериментальное
значение сигнала с ИСИ в момент времени
- экспериментальное
значение сигнала с ИСИ в момент времени
![]() ;
;
![]() - значение найденной
функции в момент времени
- значение найденной
функции в момент времени
![]() ;
;
![]() - коэффициент
Стьюдента для
- коэффициент
Стьюдента для
![]() -процентного
уровня вероятности.
-процентного
уровня вероятности.
Для уровня
вероятности
![]() =
95 % коэффициент Стьюдента может быть
вычислен по эмпирической формуле:
=
95 % коэффициент Стьюдента может быть
вычислен по эмпирической формуле:
![]() ,
,
где
![]() - степень свободы.
- степень свободы.
Если в качестве
искомой функции используют степенной
многочлен (полином), то за
![]() в формулах критериев адекватности
принимается значение его степени.
в формулах критериев адекватности
принимается значение его степени.
При использовании
других видов функций за
![]() принимают значение
принимают значение![]() ,
где
,
где![]() - число параметров, входящих в эту
функцию.
- число параметров, входящих в эту
функцию.
Следует заметить, что в практике определения динамических характеристик СИ поиск функциональной зависимости в виде степенного многочлена (полинома) не производится.
В таблице 9.1
приведены значения параметра
![]() для типовых динамических моделей СИ.
для типовых динамических моделей СИ.
Таблица 9.1
|
№ ДМ |
Тип динамической модели СИ |
Передаточная функция
|
| |
|
1 |
Позиционные
|
Безынерционное |
|
0 |
|
2 |
Форсирующее |
|
1 | |
|
3 |
Апериодическое 1-го порядка |
|
1 | |
|
4 |
Апериодическое 1-го порядка с форсированием |
|
2 | |
|
5 |
Апериодическое 2-го порядка |
|
2 | |
|
6 |
Апериодическое 2-го порядка с форсированием |
|
3 | |
|
7 |
Колебательное |
|
2 | |
|
8 |
Двукратное апериодическое |
|
1 | |
|
9 |
Апериодическое 1-го порядка с транспортным запаздыванием |
|
2 | |
|
10 |
Интегрирующие |
Интегрирующее идеальное 1-го порядка |
|
0 |
|
11 |
Интегрирующее с замедлением 2-го порядка |
|
1 | |
|
12 |
Изодромное |
|
1 | |