

6.2 Электрические фильтры
Электрическим фильтром называется устройство, при помощи которого электрические колебания разных частот отделяются друг от друга. Он представляет собой активный или пассивный четырехполюсник, пропускающий некоторую определенную полосу частот с малым затуханием.
Вне этой полосы частот затухание велико. Теория фильтров предполагает нагрузку фильтра согласованной по входу и по выходу, хотя в действительности согласовать нагрузку на всех частотах невозможно.
Полоса частот, при которых затухание мало, называется полосой пропускания фильтра. Остальная область частот называется полосой задерживания фильтра.
Электрические фильтры классифицируются по различным признакам.
Классификация по пропускаемым частотам. В зависимости от пропускаемого спектра частот фильтры разделяются на:
а) фильтры нижних частот ФНЧ – низкочастотные;
б) фильтры верхних частот ФВЧ – высокочастотные;
в) полосовые фильтры ПФ;
д) заграждающие фильтры ЗФ – режекторные.
Кроме того фильтры классифицируются по схемам звеньев, по характеристикам и по типам элементов, а также могут быть активными или пассивными.
Основными параметрами
ФНЧ и ФВЧ являются частота среза
![]() ,
коэффициент передачи в полосе пропускания
,
коэффициент передачи в полосе пропускания![]() ,
наклон АЧХ в полосе задерживания
,
наклон АЧХ в полосе задерживания![]() и неравномерность АЧХ в полосе пропускания.
Для ПФ и ЗФ дополнительно вводят понятие
добротности
и неравномерность АЧХ в полосе пропускания.
Для ПФ и ЗФ дополнительно вводят понятие
добротности![]() и усиления на частоте
и усиления на частоте![]() .
.
На рисунках 6.2 - 6.5 сплошными линиями изображены идеальные АЧХ указанных фильтров, а пунктирными линиями показаны примеры отклонения реальных характеристик от идеальных.
Добротность ПФ и ЗФ определяется соотношением
![]() ,
,
где
![]() - полоса пропускания для ПФ или полоса
задерживания для ЗФ, измеряемой на
уровне 0,707 от
- полоса пропускания для ПФ или полоса
задерживания для ЗФ, измеряемой на
уровне 0,707 от![]() .
.
Наклон
![]() АЧХ, построенной в логарифмическом
масштабе, измеряется с учетом знака в
АЧХ, построенной в логарифмическом
масштабе, измеряется с учетом знака в![]() .
.
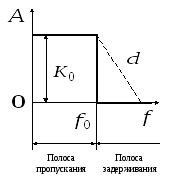

Рисунок 6.2 – АЧХ ФНЧ Рисунок 6.3 – АЧХ ФВЧ
Полоса
задерживания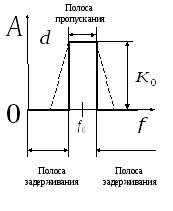
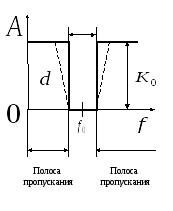
Рисунок 6.4 – АЧХ ПФ Рисунок 6.5 – АЧХ ЗФ
Полезный сигнал
как правило менее широкополосен, чем
помеха, и его спектральная плотность
падает с ростом частоты. Поэтому в
системах экспериментального определения
динамических характеристик СИ применяются
ФНЧ. При этом существует некоторое
оптимальное значение полосы пропускания
ФНЧ
![]() (или
(или![]() ),
минимизирующее значение среднего
квадратического отклонения погрешности
от действия помех. Для нахождения
оптимального значения
),
минимизирующее значение среднего
квадратического отклонения погрешности
от действия помех. Для нахождения
оптимального значения![]() необходимо знание спектральных
характеристик сигналов измерительной
информации и помехи.
необходимо знание спектральных
характеристик сигналов измерительной
информации и помехи.
На рисунке 6.6 приведена схема активного ФНЧ первого порядка с инвертирующим усилителем.
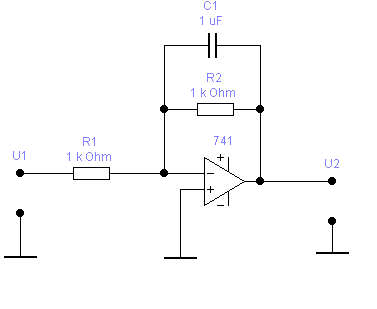
Рисунок 6.6 – Активный ФНЧ первого порядка
Передаточная функция фильтра, приведенного на рисунке 6.6, имеет вид
![]() (6.1)
(6.1)
где
![]() - коэффициент передачи фильтра в полосе
пропускания;
- коэффициент передачи фильтра в полосе
пропускания;
![]() - постоянная времени
фильтра.
- постоянная времени
фильтра.
Частота среза данного фильтра равна
![]() .
(6.2)
.
(6.2)
На рисунке 6.7 приведена схема ФНЧ второго порядка со сложной отрицательной обратной связью.
![]()
![]()
![]()
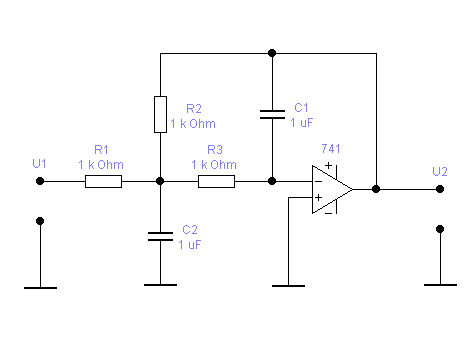
Рисунок 6.7 – Активный ФНЧ второго порядка
Передаточная функция фильтра, приведенного на рисунке 6.7, имеет вид
![]() ,
(6.3)
,
(6.3)
где
![]() - коэффициент передачи фильтра в полосе
пропускания;
- коэффициент передачи фильтра в полосе
пропускания;
![]() - первая постоянная
времени фильтра;
- первая постоянная
времени фильтра;
![]() - вторая постоянная
времени фильтра.
- вторая постоянная
времени фильтра.