4.3.2 Выбор функции регрессии
В качестве функции регрессии следует выбирать ту функцию, которой соответствует экспериментальная характеристика ИСИ.
Для экспериментальной
переходной характеристики ИСИ это
переходная функция
![]() .
.
Для экспериментальной
импульсной переходной характеристики
ИСИ это импульсная
переходная функция
![]() .
.
Для экспериментальной
амплитудно-частотной характеристики
это амплитудно-частотная функция
![]() и т. д.
и т. д.
На практике при
определении динамических характеристик
СИ чаще всего в качестве функции регрессии
выбирают переходную функцию
![]() и ищут ее параметры для соответствующих
динамических моделей.
и ищут ее параметры для соответствующих
динамических моделей.
4.3.3 Системы дифференциальных уравнений для различных динамических моделей си
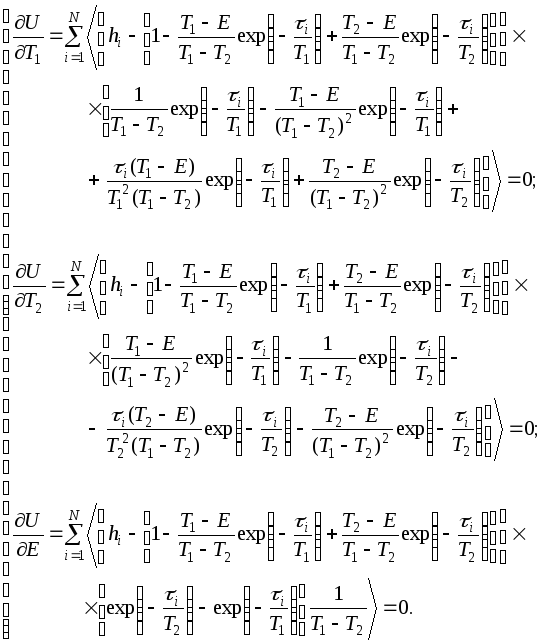
Ниже приведены
системы дифференциальных уравнений в
частных производных, выведенных для
типовых динамических моделей (см. таблицу
1.1) с учетом вида их переходных функций
(см. приложение А). Частные производные
от отклонения
![]() по параметрам переходных функций
выведены с использованием шаблона
дифференцирования в системеMathcad
2000.
по параметрам переходных функций
выведены с использованием шаблона
дифференцирования в системеMathcad
2000.
Обозначение
![]() соответствует
соответствует![]() в выражении (4.3).
в выражении (4.3).
а) ДМ № 3. Апериодическое 1-го порядка СИ:

б) ДМ № 4. Апериодическое 1-го порядка СИ с форсированием:
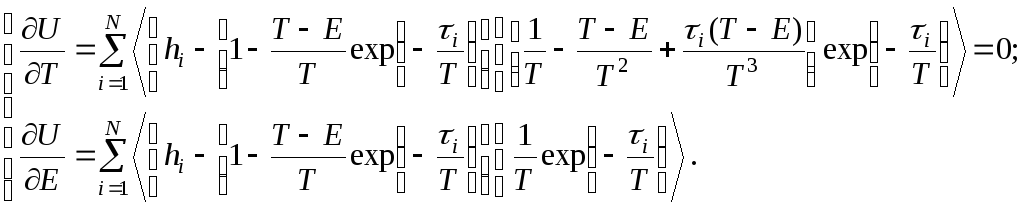
в) ДМ № 5. Апериодическое 2-го порядка СИ:

г) ДМ № 6. Апериодическое 2-го порядка СИ с форсированием:
д) ДМ № 7. Колебательное СИ:
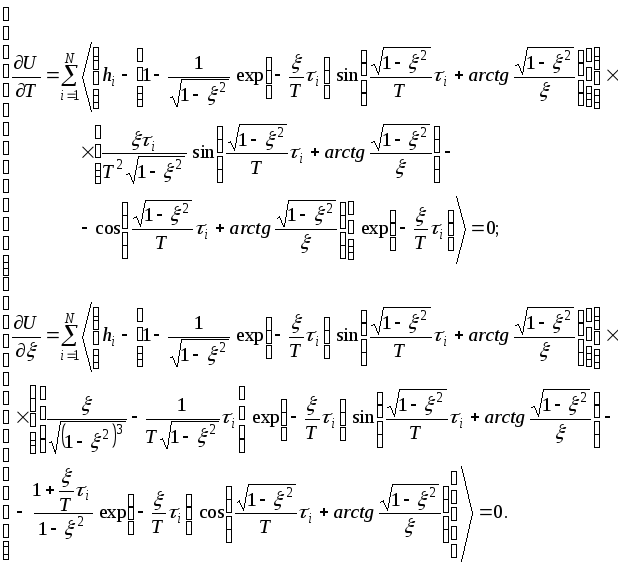
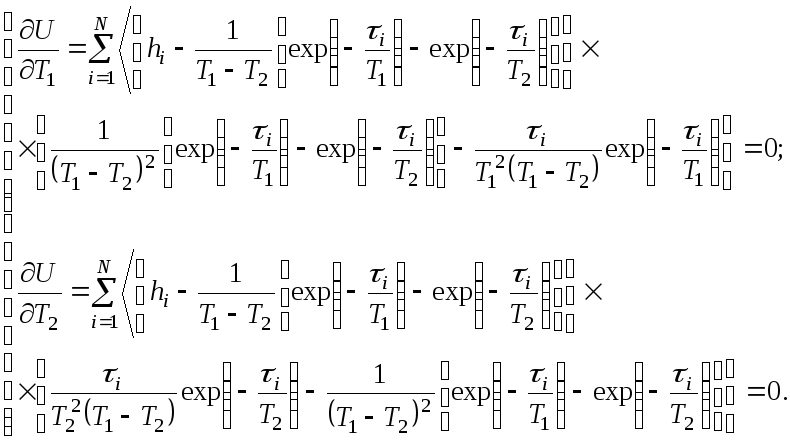
е) ДМ № 8. Двукратное апериодическое СИ:

ж) ДМ № 9. Апериодическое 1-го порядка с транспортным запаздыванием.
Определение
постоянной времени
![]() производится по уравнению для ДМ № 3.
Транспортное запаздывание
производится по уравнению для ДМ № 3.
Транспортное запаздывание![]() определяется непосредственно из
экспериментальной переходной
характеристики ИСИ.
определяется непосредственно из
экспериментальной переходной
характеристики ИСИ.
и) ДМ № 11. Интегрирующее СИ с замедлением 2-го порядка:

к) ДМ № 14. Дифференцирующее СИ с замедлением 1-го порядка:

л) ДМ № 15. Дифференцирующее СИ с замедлением 2-го порядка:
Для ДМ № 1, ДМ № 2, ДМ № 10, ДМ № 12 и ДМ №13 дифференциальные уравнения не приведены, так как часть моделей относится к идеальным (т.е. не существующим на практике) СИ, а другая часть легко описывается линейной функцией регрессии.
4.3. 4 Реализация регрессионного анализа
Как видно из приведенных систем дифференциальных уравнений в частных производных, они являются достаточно сложными по виду. Поэтому на практике их решают с использованием стандартных программ, имеющихся в различных системах автоматизации математических вычислений.
Рассмотрим
проведение нелинейной регрессии общего
в системе Mathcad
2000 на примере поиска параметров переходной
функции ДМ № 3. В качестве исходных
данных используем выходной сигнал ИСИ,
изображенный на рисунке 4.3, и таблицу
его отсчетов (см. таблицу 4.4). Так как
истинное значение постоянной времени
рассматриваемой ДМ № 3 известно (![]() ),
то впоследствии можно будет оценить
точность проведения регрессионного
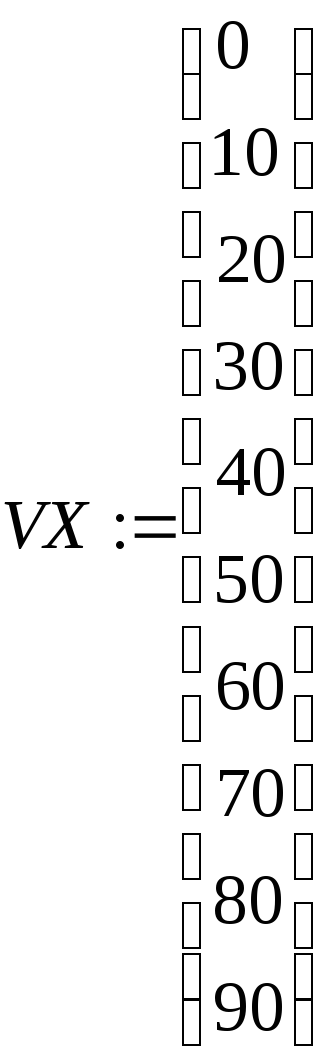
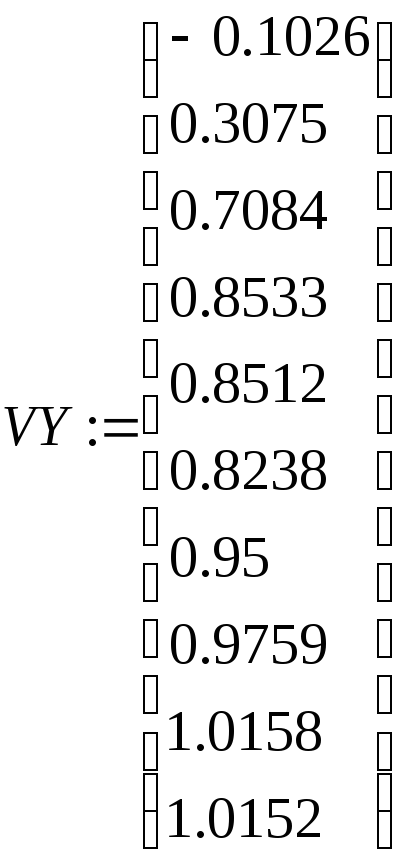
анализа. Кроме того, из таблицы 4.4 выберем
не все, а только 10 значений зарегистрированной
переходной характеристики, т. е.
),
то впоследствии можно будет оценить
точность проведения регрессионного
анализа. Кроме того, из таблицы 4.4 выберем
не все, а только 10 значений зарегистрированной
переходной характеристики, т. е.![]() .
.
Для проведения
нелинейной регрессии общего вида
используется функция
![]() ,
которая возвращает вектор
,
которая возвращает вектор![]() параметров функции
параметров функции![]() ,
дающий минимальную среднеквадратичную
погрешность приближения функцией
,
дающий минимальную среднеквадратичную
погрешность приближения функцией![]() исходных данных.
исходных данных.
Вектор
![]() должен быть вектором с символьными
элементами, причем они должны содержать
аналитические выражения для исходной
функции и ее производных по всем
параметрам. Вектор
должен быть вектором с символьными
элементами, причем они должны содержать
аналитические выражения для исходной
функции и ее производных по всем
параметрам. Вектор![]() должен содержать начальные значения
элементов вектора
должен содержать начальные значения
элементов вектора![]() ,
необходимые для решения системы
нелинейных уравнений регрессии
итерационным методом.
,
необходимые для решения системы
нелинейных уравнений регрессии
итерационным методом.
В таблице 4.6 приведена реализация данной нелинейной регрессии в системе Mathcad 2000.
Как видно из таблицы
4.5 результат вычисления постоянной
времени дает значение
![]() ,
что отличается от истинного значения
на
,
что отличается от истинного значения
на![]() .
Это вполне достаточная точность
определения постоянной времени ИСИ,
имеющего динамическая модель № 3, по
экспериментальной переходной
характеристике с таким уровнем случайного
сигнала (помехи).
.
Это вполне достаточная точность
определения постоянной времени ИСИ,
имеющего динамическая модель № 3, по
экспериментальной переходной
характеристике с таким уровнем случайного
сигнала (помехи).
Таблица 4.6 – Реализация нелинейной регрессии в системе Mathcad 2000
|
Нелинейная регрессия |
Комментарии |
|
|
Исходная функция регрессии:
Производная исходной функции
по параметру
Системная переменная. Начало массива. Определяет индекс первого элемента массива.
Вектор
элементами
исходной функции и ее производной по
параметру
Вектор значений
времени
переходной
характеристики в
Вектор значений переходной
характеристики
Вектор содержащий начальное (приближенное) значение
искомой постоянной
времени в
Функция,
возвращающая вектор
параметров
функции
дает минимальную среднеквадратичную погрешность приближения.
Результат решения:
|