

3.3 Требования, предъявляемые к регистрирующим приборам
Из числа метрологических характеристик регистрирующих приборов, которые необходимо обязательно учитывать при экспериментальном определения ДХ ИСИ, следует выделить следующие:
а) предел допускаемого
значения основной погрешности
регистрирующего прибора
![]() ;
;
б) амплитудно-частотную
характеристику
![]() ;
;
г) диапазон частот
входного сигнала, при котором осуществляется
его регистрация с погрешностью не более
![]() .
Если нижний предел диапазона частот
равен
.
Если нижний предел диапазона частот
равен![]() (или,
что то же самое,
(или,
что то же самое,![]() ),
то необходимо знать верхнее предельное
значение частоты входного сигнала, при
котором осуществляется его регистрация
с погрешностью не более
),
то необходимо знать верхнее предельное
значение частоты входного сигнала, при
котором осуществляется его регистрация
с погрешностью не более![]() .
.
д) время реакции
![]() ;
;
е) постоянную
времени
![]() .
.
При выборе регистрирующего прибора по его метрологическим характеристикам можно использовать те же рекомендации, что приведены в ГОСТ 8.256 и ГОСТ 8.508.
В частности, соотношение (3.6) примет следующий вид:
![]()
а соотношение (3.7 ) запишется как
![]() (3.10)
(3.10)
Соотношение (3.10) использовано из рекомендаций ГОСТ 8.508, в котором не приведено обоснование данного условия.
Попробуем получить математически обоснованные соотношения между метрологическими характеристиками ИСИ и регистрирующего прибора для обеспечения заданной точности определения динамических характеристик ИСИ.
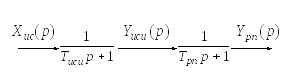
Рассмотрим простейший случай, когда динамические модели ИСИ и регистрирующего прибора описываются апериодическим звеном 1-го порядка.
Фрагмент блок-схемы измерительной системы для этого случая представлен на рисунке 3.8.
Р
![]()
![]()



![]()
![]()
![]()
![]()
![]()



![]()
![]()
![]()
![]()
![]()



![]()
![]()
![]()
![]()
![]()



![]()
![]()
![]()
![]()
![]()



![]()
![]()
![]()
![]()
![]()



![]()
![]()
![]()
![]()
![]()



![]()
![]()
![]()
![]()
![]()



![]()
![]()
![]()
Если
![]() ,
то выходной сигнал
,
то выходной сигнал![]() будет являться переходной характеристикой
ИСИ, по которой легко определить значение
постоянной времени
будет являться переходной характеристикой
ИСИ, по которой легко определить значение
постоянной времени![]() по методу 63,2 %. А именно, по данному методу
значение постоянной времени любого
апериодического звена 1-го порядка
определяется как время от начала
переходного процесса до момента времени,
когда его выходной сигнал достигнет
63,2 % от своего установившегося значения
(см. рисунок 3.9).
по методу 63,2 %. А именно, по данному методу
значение постоянной времени любого
апериодического звена 1-го порядка
определяется как время от начала
переходного процесса до момента времени,
когда его выходной сигнал достигнет
63,2 % от своего установившегося значения
(см. рисунок 3.9).
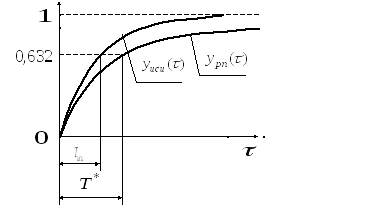
Рисунок 3.9
Однако в силу
инерционности регистрирующего прибора
им регистрируется сигнал
![]() ,
который не совпадает с сигналов
,
который не совпадает с сигналов![]() ,
причем расхождение тем больше, чем
больше отношение
,
причем расхождение тем больше, чем
больше отношение![]() .
.
Из рисунка 3.9 следует, что:
![]() (3.11)
(3.11)
Если
![]() ,
то из (3.21) с учетом (1.2) можно получить
,
то из (3.21) с учетом (1.2) можно получить
![]() (3.12)
(3.12)
Введем обозначение
![]() или
или![]() .
Тогда (3.12) можно переписать в следующем
виде:
.
Тогда (3.12) можно переписать в следующем
виде:
![]()
или
![]() .
(3.13)
.
(3.13)
Обозначим через
![]() постоянную
времени ИСИ, определенную по методу
63,2 % при наличии инерционности
регистрирующего прибора. Тогда
относительная погрешность определения
постоянной времени ИСИ будет определяться
формулой
постоянную
времени ИСИ, определенную по методу
63,2 % при наличии инерционности
регистрирующего прибора. Тогда
относительная погрешность определения
постоянной времени ИСИ будет определяться
формулой
![]() (3.14)
(3.14)
В таблице 3.3
приведены результаты расчета погрешности
![]() по формуле (3.14) с учетом (3.13) в зависимости
от значений коэффициента
по формуле (3.14) с учетом (3.13) в зависимости
от значений коэффициента![]() .
.
Таблица 3.3
|
|
|
|
0,001 0,01 0,05 0,1 0,2 0,5 |
0,105 1,005 5,136 10,53 22,17 58,50 |
Из таблицы 3.3 следует, что для определения постоянной времени ИСИ по методу 63,2 % с помощью измерительной системы, представленной на рисунке 3.8, с погрешностью, например, не более 1 % необходимо иметь регистрирующий прибор с постоянной времени в 100 и более раз меньшей по сравнению с постоянной времени ИСИ.
Однако на практике значительная часть регистрирующих приборов имеют передаточную функцию колебательного звена 1-го порядка. Примерами таких РП являются все самопишущие приборы типа А 550, светолучевые осциллографы со светолучевыми гальванометрами, а также электроннолучевые осциллографы, в том числе, с запоминанием.
Рассмотрим случай, когда динамическая модель ИСИ описывается апериодическим звеном 1-го порядка, а РП – колебательным звеном 1-го порядка.
Фрагмент блок-схемы измерительной системы для этого случая представлен на рисунке 3.10.
![]()
![]()
![]()




Рисунок 3.10 - Блок-схема измерительной системы
Устойчивые
колебательные звенья характеризуются
наличием дополнительного коэффициента
![]() ,
который называется параметром затухания
или степенью успокоения. Возможный
диапазон изменения для устойчивых
колебательных звеньев
,
который называется параметром затухания
или степенью успокоения. Возможный
диапазон изменения для устойчивых
колебательных звеньев![]() ,
но на практике обычно
,
но на практике обычно![]() .
.
Таким образом, на
точность определения постоянной времени
ИСИ влияют два независимых параметра![]() – постоянная времени
– постоянная времени![]() РП и его степень успокоения
РП и его степень успокоения![]() .
.
Установление
необходимых соотношений между
![]() ,
,![]() ,
,![]() и
и![]() произведен следующим образом.
произведен следующим образом.
Из рисунка 3.10 следует:
![]() (3.15)
(3.15)
Если
![]() ,
то из (3.15) можно получить [2, с. 49]:
,
то из (3.15) можно получить [2, с. 49]:
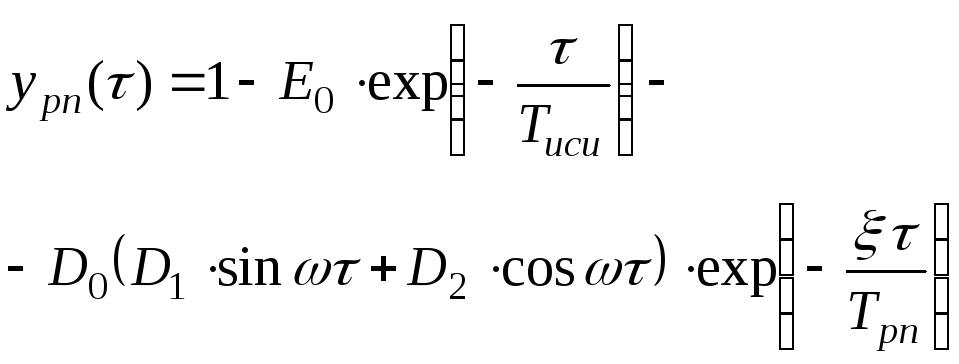 ,
(3.16)
,
(3.16)
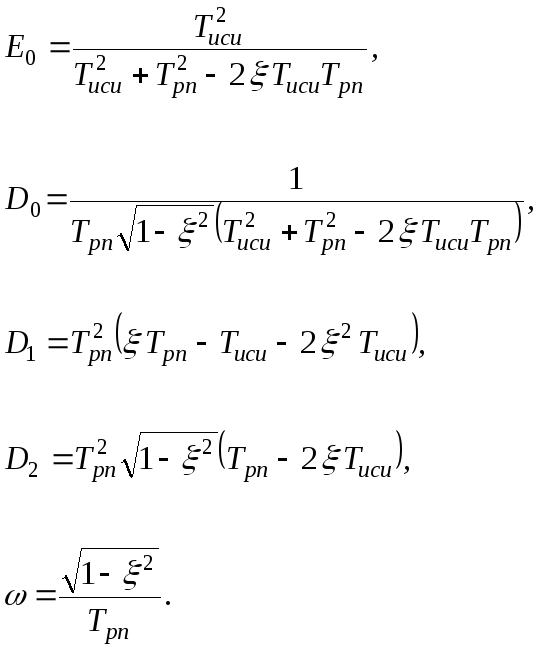
где
Аналогично
предыдущему случаю введем обозначение
![]() или
или![]() .
Кроме этого, подставим в (3.16)
.
Кроме этого, подставим в (3.16)![]() ,
а само выражение (3.16) приравняем значению
0,632, т. е.
,
а само выражение (3.16) приравняем значению
0,632, т. е.![]() 0,632.
0,632.
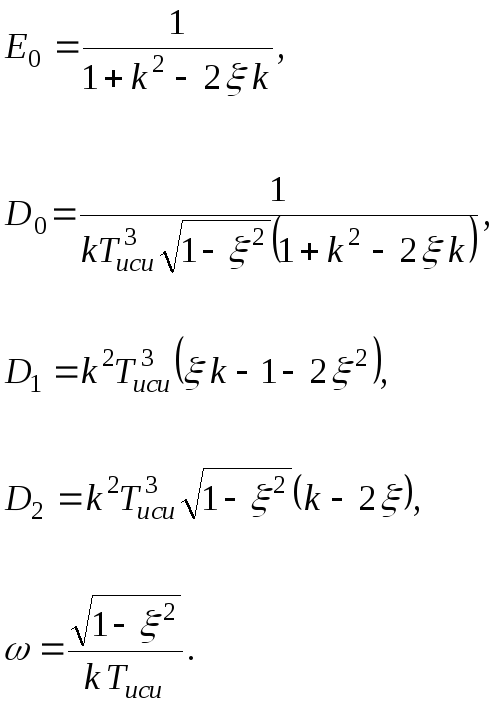
После указанных подстановок и замен получим:
 ,
(3.17)
,
(3.17)
где
Выражение (3.17) можно упростить после раскрытия скобок и проведения сокращений до вида:
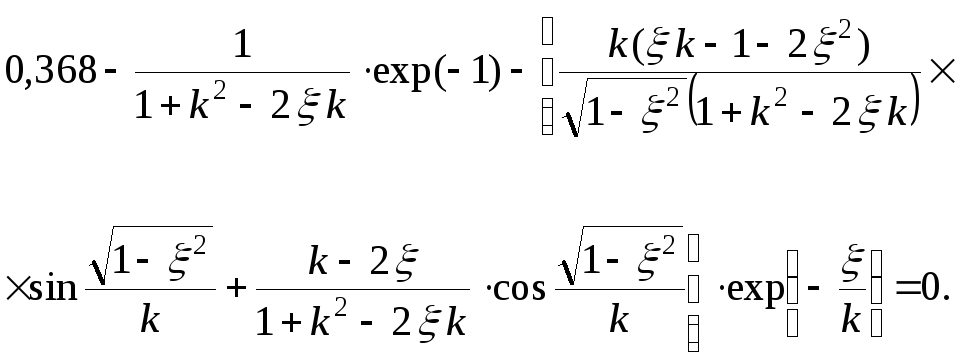 (3.18)
(3.18)
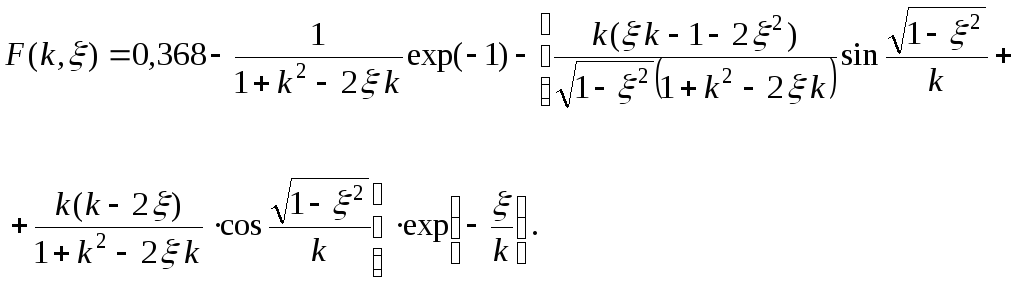
Как видно из (3.18)
выражение содержит две независимые
переменные (аргументы
![]() и
и![]() )
и лишено постоянных времени ИСИ и РП.
)
и лишено постоянных времени ИСИ и РП.
Была сделана
попытка решить уравнение (3.18) в системе
Machcad
2000 с помощью функции
![]() при задании
при задании![]() и поиску соответствующего значения
и поиску соответствующего значения![]() .
Однако результаты решений не обладали
однозначностью – результат вычисления
.
Однако результаты решений не обладали
однозначностью – результат вычисления![]() зависел
от начального значения этой переменной
при реализации вычисления выражения
(3.18) итерационным методом. Поэтому было
проведено исследование поведения
выражения (3.18) как функции двух переменных
путем построения трехмерного графика.
Выражение (3.18) исследовалось, таким
образом, в виде
зависел
от начального значения этой переменной
при реализации вычисления выражения
(3.18) итерационным методом. Поэтому было
проведено исследование поведения
выражения (3.18) как функции двух переменных
путем построения трехмерного графика.
Выражение (3.18) исследовалось, таким
образом, в виде
На рисунке 3.11
представлен трехмерный график поверхности
функции
![]() ,
которая пересекается с плоскостью
,
которая пересекается с плоскостью![]() по двум линиям
по двум линиям![]() и
и![]() .
Каждая из этих линий являются совокупностью
корней уравнения (3.18). Однако линия
.
Каждая из этих линий являются совокупностью
корней уравнения (3.18). Однако линия![]() в диапазоне
в диапазоне![]() соответствует значениям
соответствует значениям![]() практически равным нулю. Линия же
практически равным нулю. Линия же![]() в том же диапазоне
в том же диапазоне![]() соответствует значениям
соответствует значениям![]() ,
меняющихся примерно от 1,5 до 3. Наличие
двух линий как раз объясняет неоднозначность
результатов применения функции
,
меняющихся примерно от 1,5 до 3. Наличие
двух линий как раз объясняет неоднозначность
результатов применения функции![]() - в зависимости от начального значения
- в зависимости от начального значения![]() при заданном
при заданном![]() вычислительной программой выдавалось
значение корня
вычислительной программой выдавалось
значение корня![]() либо из линии
либо из линии![]() либо из линии
либо из линии![]() .
.
Совокупность
значений
![]() и
и![]() ,
соответствующих линии
,
соответствующих линии![]() ,
из дальнейшего рассмотрения исключена
ввиду малой практической значимости.
,
из дальнейшего рассмотрения исключена
ввиду малой практической значимости.
На рисунке 3.12
представлена диаграмма, изображающая
зависимость между
![]() и
и![]() ,
соответствующей линии
,
соответствующей линии![]() ,
а в таблице 3.9 – та же зависимость, но
выраженная в числовых значениях.
,
а в таблице 3.9 – та же зависимость, но
выраженная в числовых значениях.
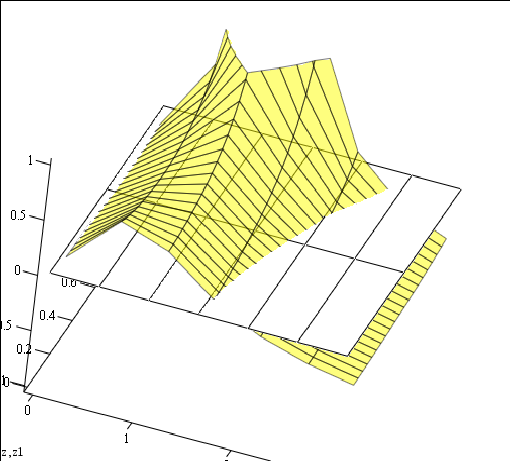
Рисунок 3.11
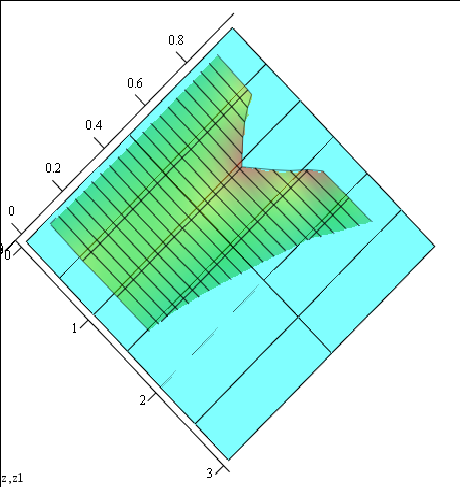
Рисунок 3.12
Таблица 3.4
|
|
|
|
|
|
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 |
1,522 1,565 1,627 1,704 1,800 1,911 2,036 2,172 2,318 |
1,632 1,670 1,723 1,795 1,883 1,986 2,105 2,234 2,367 |
1,406 1,455 1,523 1,608 1,709 1,829 1,961 2,104 2,256 |
Выбор любой
комбинации
![]() и
и![]() из рисунка 3.12 или таблицы 3.4 обеспечит
нахождение постоянной времени ИСИ по
зарегистрированной данным РП переходной
характеристике без погрешности. Если
же задать, к примеру, погрешность
определения
из рисунка 3.12 или таблицы 3.4 обеспечит
нахождение постоянной времени ИСИ по
зарегистрированной данным РП переходной
характеристике без погрешности. Если
же задать, к примеру, погрешность
определения![]() в
в![]() 10 %, то соответственно расширится диапазон
допустимых значений
10 %, то соответственно расширится диапазон
допустимых значений![]() ,
соответствующих конкретному значению
,
соответствующих конкретному значению![]() .
Данный пример иллюстрируется на рисунке
3.13 граничными кривыми, а в таблице 3.4 –
дополнительными столбцами, обозначенными
как
.
Данный пример иллюстрируется на рисунке
3.13 граничными кривыми, а в таблице 3.4 –
дополнительными столбцами, обозначенными
как![]() и
и![]() .
.
Рассмотрим пример пользования полученными соотношениями.
Пусть ожидаемое
значение постоянной времени ИСИ
составляет 1![]() .
Требуется выбрать РП, обеспечивающий
определение
.
Требуется выбрать РП, обеспечивающий
определение![]() без погрешности и с погрешностью
без погрешности и с погрешностью![]() 10 % если известно, что параметр затухания
10 % если известно, что параметр затухания![]() у выбираемых РП составляет 0,7.
у выбираемых РП составляет 0,7.
Из таблицы 3.4 для
случая определения
![]() без погрешности выбираем значение
без погрешности выбираем значение![]() =
2,036. Тогда
=
2,036. Тогда![]() .
.

Рисунок 3.13
Для случая
определения
![]() с 10-ти процентной погрешностью параметр
с 10-ти процентной погрешностью параметр![]() может меняться от 1,961 до 2,105. Это дает
диапазон значений
может меняться от 1,961 до 2,105. Это дает
диапазон значений![]() от 1,961 с до 2,105 с.
от 1,961 с до 2,105 с.
Полученные
соотношения могут быть использованы и
для решения обратной задачи – установлению
допустимых значений
![]() ,
определяемых по методу 63,2 %, по известным
динамических характеристикам РП (его
постоянной времени
,
определяемых по методу 63,2 %, по известным
динамических характеристикам РП (его
постоянной времени![]() и параметру затухания
и параметру затухания![]() ).
).
Для других видов динамических моделей ИСИ и РП, входящих в измерительную систему, требуется вывод своих конкретных соотношений между их динамическими характеристиками.