

5 Определение переходных функций средств измерений по передаточным функциям
Математической основой классификации линейных аналоговых СИ является передаточная функция вида [4, с. 92]:
 .
(5.1)
.
(5.1)
Как известно, знание передаточной функции позволяет с учетом обратного преобразования Лапласа найти переходную функцию по выражению
![]() ,
(5.2)
,
(5.2)
где
![]() .
.
Обратный переход от изображения к оригиналу обычно связан с громоздкими вычислениями в области комплексных чисел. Поэтому в теории автоматического управления нашли применение математические формулы, охватывающие широкий класс практических задач, которые успешно могут быть применены для определения переходных функций СИ.
Случай 1.
Предположим, что в (5.1)
![]() ,
,![]() ,
,![]() и
и![]() .
Тогда
.
Тогда
![]() ,
(5.3)
,
(5.3)
где
![]() -
корни уравнения
-
корни уравнения![]() .
.
Формулу (5.3) иногда называют второй теоремой разложения Хевисайда.
Пример. Пусть СИ описывается передаточной функцией вида
![]() .
.
Корнями уравнения
![]() являются
являются
![]() ,
,
а производная
функции
![]() по
по![]() равна:
равна:

После подстановки в (5.3) полученных выражений переходная функция принимает вид
![]() ,
,
где

Случай 2.
Предположим, что в (5.1)
![]() ,
,![]() ,
,![]() и
и![]() ,
а все корни уравнения
,
а все корни уравнения![]() кратные, т. е.
кратные, т. е.
![]() ,
,
где
![]() -
число кратных корней.
-
число кратных корней.
Тогда переходная функция СИ определяется выражением вида
![]() .
(5.4)
.
(5.4)
Пример. Пусть СИ
описывается передаточной функцией вида
(![]() =2)
=2)
![]() .
.
Тогда переходная функция данного СИ с учетом (6) примет вид
![]() .
.
Для некоторых других видов передаточных функций средств измерений, которые описываются выражением (5.1), в [2, с. 48] приведены соответствующие уравнения переходных функций.
![]()
6 Фильтрация сигналов измерительной информации
6.1 Сигналы измерительной информации
Сигналом измерительной информации называется сигнал, функционально связанный с измеряемой физической величиной.
Сигнал измерительной информации имеет информативный параметр – параметр, функционально связанный с измеряемой величиной. Параметры сигнала, не связанные функционально с измеряемой величиной, называют неинформативными параметрами.
Как видно из рисунка
3.1 сигналом измерительной информации
с ИСИ, несущим информацию о его динамических
свойствах, является сигнал
![]() .
При проведении эксперимента редко
удается зарегистрировать с помощью
регистрирующего прибора непосредственно
сам сигнал
.
При проведении эксперимента редко
удается зарегистрировать с помощью
регистрирующего прибора непосредственно
сам сигнал![]() .
Чаще всего требуется его преобразовать
в другой вид для последующей передачи,
хранения, обработки или восприятия
регистрирующим прибором. В измерительной
системе (установке) эту функцию могут
выполнять измерительные преобразователи.
Следует иметь в виду, что измерительные
преобразователи как полноправные СИ,
имеют свои нормированные метрологические
характеристики, которые также нужно
учитывать при проведения эксперимента.
.
Чаще всего требуется его преобразовать
в другой вид для последующей передачи,
хранения, обработки или восприятия
регистрирующим прибором. В измерительной
системе (установке) эту функцию могут
выполнять измерительные преобразователи.
Следует иметь в виду, что измерительные
преобразователи как полноправные СИ,
имеют свои нормированные метрологические
характеристики, которые также нужно
учитывать при проведения эксперимента.
В случае наличия
в сигнале
![]() случайного сигнала (помехи)
случайного сигнала (помехи)![]() с высоким уровнем необходимо в
измерительную систему включать устройства
подавления помех, которые называются
фильтрами сигналов.
с высоким уровнем необходимо в
измерительную систему включать устройства
подавления помех, которые называются
фильтрами сигналов.
Фильтры могут быть встроены в измерительные преобразователи или же быть самостоятельными функциональными элементами измерительной системы.
На рисунке 6.1 представлен пример реализации измерительной системы с измерительным преобразователем и фильтром.
ГИС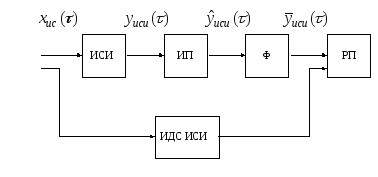
ГИС – генератор испытательного сигнала;
ИСИ – исследуемое СИ; ИП – измерительный преобразователь;
Ф – фильтр; РП – регистрирующий прибор;
ИДС ИСИ – имитатор динамического свойства ИСИ
Рисунок 6.1 – Структурная схема измерительной системы
Здесь
![]() - сигнал с выхода измерительного
преобразователя, сохранивший информацию
о динамических свойствах ИСИ. Сигнал
- сигнал с выхода измерительного
преобразователя, сохранивший информацию
о динамических свойствах ИСИ. Сигнал![]() - это сигнал с выхода фильтра, в котором
сохранена информация о динамических
свойствах ИСИ и существенна уменьшена
помеха.
- это сигнал с выхода фильтра, в котором
сохранена информация о динамических
свойствах ИСИ и существенна уменьшена
помеха.
В подавляющем
числе случаев сигнал
![]() является электрическим, поэтому
рассмотрим применение электрических
фильтров в измерительной системе,
изображенной на рисунке 6.1.
является электрическим, поэтому
рассмотрим применение электрических
фильтров в измерительной системе,
изображенной на рисунке 6.1.