

10.6 Распределенное управление
Концепция распределенного управления, реализованная в цифровой системе коммутации Е10, предусматривала разбиение множества задач управления на несколько составных частей по принципу разделения функций и/или разделения нагрузки.
Все функции управления разделяются на специализированные наборы задач, содержащиеся в независимых процессорах и обеспечивающие в совокупности выполнение всех связанных с управлением операций. К примеру, процессор абонентской ступени периодически с интервалом порядка 10 мс сканирует абонентские линии, включенные в эту ступень, отслеживает все возникающие в нем вызовы, поддерживает базу данных абонентов, ведет наблюдение за каждым вызовом и даже проводит локальное восстановление и локальную диагностику своей схемы. Все процессоры общаются друг с другом путем обмена сообщениями через коммутационное поле, общую шину или иным способом, что является основой конструкции системы программного управления узлом коммутации.
Отличительными чертами данной системы управления являются управление процессом установления каждого соединения несколькими УУ и отсутствие единого координирующего их совместную работу органа центрального управляющего устройства. Система управления может быть полностью или частично распределенной.
При полностью распределенной СУ функциональные блоки станции обслуживаются равноправными УУ, каждый из которых выполняет все управляющие функции, необходимые для нормального функционирования ЦСК. Полностью распределенной СУ соответствует приведенная схема на рис. 10.8 при условии, если все УУ равноправны.
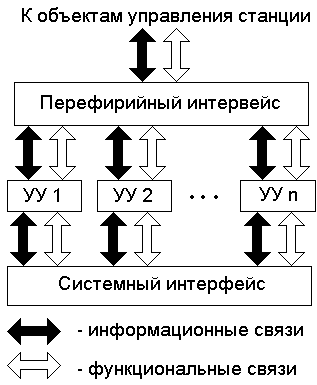
Рис.10.8. Связь между устройствами управления
При частично распределенной СУ основные управляющие функции в каждом блоке выполняются местными УУ, но управление определенными функциями (например техническая эксплуатация и обслуживание (О&М), сопряжение внешних устройств ввода-вывода данных (I/O) и т.д.) осуществляется централизовано. На рис. 10.9 представлены примеры полностью и частично распределенных СУ с непосредственными связями устройств управления.
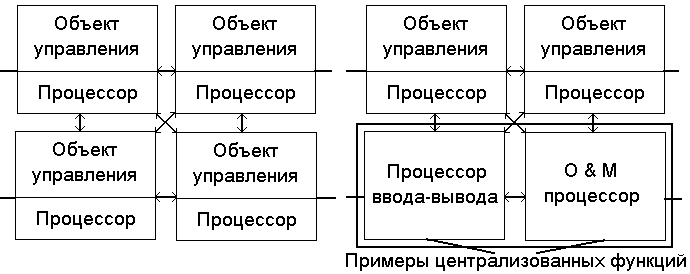
Рис.10.9. Распределенная СУ с непосредственными связями
Достоинства распределенных систем управления:
простота реализации;
высокая надежность за счет отсутствия каких-либо центральных устройств управления;
простота программного обеспечения для отдельно взятого блока;
низкая стоимость;
модульность, легкая расширяемость.
Недостатки полностью децентрализованных СУ:
существенные задержки при межпроцессорных связях;
необходимость хранения информации о поле в каждом устройстве управления;
некоторая избыточность оборудования;
строгая и сложная организация межпроцессорных связей.
10.7 Способы взаимодействия управляющих устройств
В распределенных и иерархических системах управления взаимосвязь и взаимодействие управляющих устройств в процессе управления установлением соединений осуществляется через системный интерфейс.
Существует три варианта построения систем управления с различными типами системного интерфейса:
с непосредственными связями между УУ;
с организацией связи УУ через общую шину;
связь УУ через коммутационное поле (КП).
Принцип построения системного интерфейса зависит от числа взаимосвязанных УУ и объема информации, передаваемого между ними.
При небольшом числе устройств управления и достаточно большом объеме передаваемой информации между каждой парой УУ связь может осуществляться с помощью специальных каналов (рис. 10.10), непосредственно соединяющих каждую пару УУ и имеющих прямой доступ к памяти этих управляющих устройств. При этом обмен информацией может выполняться одновременно между парами УУ. Недостатком данного принципа построения являются большие технические и экономические затраты, поэтому данный способ не получил широкого распространения в ЦСК.

Рис. 10.10. Непосредственные связи между УУ
При увеличении числа УУ до нескольких десятков и соответствующем уменьшении объема информации, передаваемой между отдельными парами УУ, организация непосредственной связи между ними становится экономически нецелесообразной и практически трудно реализуемой.
В этом случае взаимосвязи между устройствами управления осуществляются, как правило, с помощью общей шины (ОШ), к которой подключаются все УУ, поочередно с разделением во времени, использующие эту шину для передачи необходимой информации (рис. 10.11).
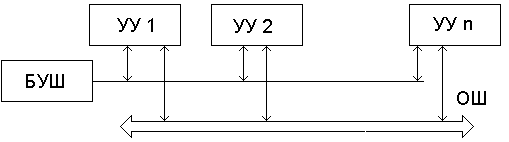
Рис.10.11. Связь УУ через ОШ
В любой момент по общей шине информация может передаваться только между одной парой УУ, поэтому для организации очередности доступа УУ к ОШ в состав системного интерфейса вводится специальный блок управления шиной (БУШ).
Достоинствами связи УУ через ОШ являются простота и экономичность. Недостатками являются снижение живучести управляющей системы в целом и ограниченная пропускная способность общей шины.
В случае организации связи между УУ через коммутационное поле с собственным управлением (рис. 10.12), для обмена информацией между УУ может использоваться специальное или общее КП.

Рис.10.12. Связь УУ через КП
В последнем случае информация между УУ через КП может передаваться по любым или только по специально выделенным временным каналам коммутируемых ИКМ-линий (например, по 16-му временному интервалу). Достоинством такого способа является отсутствие ограничений на число УУ в системе. Недостатки - дополнительные затраты производительности УУ на установление и разъединение соединений в КП, а также дополнительная нагрузка на общее КП и дополнительные затраты на специальное КП. Данный способ связи между устройствами управления получил наибольшее распространение в ЦСК.