

10.3 Косвенное управление
Косвенное управление применяется обычно в системах с общими УУ. При косвенном управлении информация о номере вызываемого абонента поступает не непосредственно в УУ, а в специальные приборы – регистры, поэтому такую систему управления называют регистровым управлением.
Рассмотрим процесс установления соединения на примере координатной АТС (рис. 10.3).
Р ис.
10.3. Принцип косвенного управления АТС
ис.
10.3. Принцип косвенного управления АТС
При снятии трубки телефонный аппарат с помощью маркера ступени абонентского искания (МАИ) подключается к линейному комплекту, который называется шнуровым комплектом (ШК). Маркер ступени АИ освобождается после установления соединения с ШК. Число ШК равно числу соединительных разговорных трактов. К ШК через ступень регистрового искания (РИ) подключается свободный регистр и подает в ТА сигнал готовности станции ("ответ станции") к приему номера вызываемого абонента. Номер, набранный вызывающим абонентом, последовательно, цифра за цифрой, запоминается регистром. По запросу маркера первой ступени ГИ (М I ГИ) регистр выдает информацию о первой цифре номера, на основании которой маркер выбирает направление связи. Оставшуюся часть информации регистр передает в маркер второй ступени ГИ и в маркер ступени АИ для установления соединения с вызываемым абонентом. Маркеры ступеней ГИ и АИ после установления соединения немедленно освобождаются и используются для обслуживания других вызовов. Регистр также является общим устройством.
Количество регистров немного меньше количества соединительных трактов. Время занятия регистра определяется количеством набираемых знаков номера. На набор одной цифры отводится 1,5 с. Время занятия маркера не зависит от абонента, а определяется быстродействием его блоков. В электронных АТС время занятия маркера равно 0,5-1,5 с. При регистровом управлении время занятия приборов не зависит от времени набора номера вызывающим абонентом, как это имеет место при непосредственном управлении.
Регистровое управление позволяет при необходимости (например, при повреждении линии) устанавливать соединение через обходные направления связи. Применение регистрового управления обеспечивает более экономичное построение городских и междугородних сетей.
В квазиэлектронных АТС коммутационная система может быть не разделена на ступени искания, и процесс установления соединения осуществляется одним ЦУУ, которое запрашивает регистр.
10.4 Централизованное управление
Архитектура централизованного управления, изображенная на рис. 10.4, была использована в прототипе электронной АТС, введенной в эксплуатацию в ноябре 1960 года в г. Морис (штат Иллинойс, США). В 1965 году в г. Сак-касана (штат Нью-Джерси, США) была сдана в эксплуатацию серийная электронная система коммутации ESS-1 с управлением по записанной программе, базирующаяся исключительно на центральном процессоре, который управляет всеми функциями системы. Отечественный импульсно-временной транзитный узел с программным управлением, включенный в нашей стране в действующую телефонную сеть полностью соответствовал структуре, показанной на рис. 10.4.

Рис. 10.4. Структура АТС с централизованным программным управлением
Централизованная система управления состоит из одного центрального устройства управления (ЦУУ) в пределах всего узла коммутации. Возможны два способа построения ЦУУ – на базе одного дублированного процессорного модуля или на базе нескольких процессорных модулей (рис. 10.5).
Р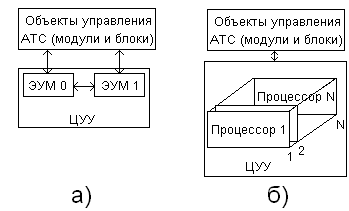 ис.
10.5.
Централизованная
система управления: а
- однопроцессорная
система; б - многопроцессорная система
ис.
10.5.
Централизованная
система управления: а
- однопроцессорная
система; б - многопроцессорная система
В состав однопроцессорного ЦУУ входят две электронные управляющие машины - ЭУМ О и ЭУМ 1. В этом случае ЦУУ выполняет как общестанционные (централизованные), так и местные задачи по управлению и взаимодействию модулей и блоков цифровой системы коммутации.
Централизованное управление АТС предусматривает выполнение следующих трех групп функций:
управление обслуживанием вызова, включая анализ имеющейся в базе данных информации, относящейся к вызываемому абоненту, прием набираемого номера, контроль процесса обслуживания вызова во всех фазах этого процесса, включая фазы отбоя и разъединения;
управление коммутацией, для чего в зависимости от структуры АТС используются разные методы, но в любом случае центральный процессор хранит отображение всех путей (свободных и используемых), находит и резервирует путь для запрашиваемого абонентским или линейным модулем соединения;
контроль, диагностика и восстановление системы, включающие диагностику неисправностей и восстановления рабочей конфигурации системы.
При централизованном управлении центральный процессор управляет, наряду с коммутацией, и функциями технического обслуживания, административного управления, контроля, диагностики и восстановления системы, для чего он должен обладать достаточной вычислительной мощностью.
Достоинствами централизованных систем управления являются:
простота построения;
экономичность для небольших станции.
К недостаткам централизованных систем управления относятся:
малая надежность, т.к. выход из строя ЭУМ приводит к полной остановки станции, поэтому используется дублирование;
высокие требования по производительности ЭУМ для станций большой емкости.
Для повышения гибкости и модульности ЦУУ может строиться на базе нескольких процессорных модулей. При этом повышается надежность системы управления (СУ) и появляется возможность наращивания ее производительности, что позволяет более эффективно справляться не только с общестанционными, но и с местными управляющими функциями.
В цифровых системах коммутации (ЦСК) централизованные системы управления не получили широкого распространения, но используются в малых АТС и УПАТС.