

6. Простейшие измерительные стереоприборы
Для выполнения стереоскопических измерений высот объектов, уклонов участков местности стереоскоп должен быть снабжен устройством для измерения разностей продольных параллаксов. Такое устройство может быть автономным (параллаксометр) и использоваться совместно с обычным стереоскопом, например с ЛЗ, или входить составной частью в конструкцию стереоскопа. Например, таким прибором может служить дешифровочный стереоскоп ДС-4. Прибор можно быстро собрать и разобрать. Предназначен он для наблюдения снимков формата до 30 х 30 см при естественном и искусственном освещении. Бинокуляр сменный с увеличением 0,9; 3,6 и 7,2 крат. Диаметр поля зрения изменяется от 18,5 до 2,5 см. Снимкодержатель свободно перемещается под наблюдательной системой в горизонтальной плоскости. Система рычагов при этом обеспечивает сохранность ориентирования снимков.
К этому же классу приборов относится стереоскоп с маркирующими механизмами — СММ (рис. 9.7). Прибор можно использовать в полевых и камеральных условиях. Кроме стереоскопических измерений высот дешифрируемых объектов и углов наклона участков местности с помощью СММ можно идентифицировать и маркировать точки на одномасштабных и разномасштабных снимках, а также переносить результаты дешифрирования со снимков на фотопланы (ортофотопланы) при разности масштабов от 0,8 до 4 крат. В полевых условиях обрабатывают снимки формата 180 х 180 мм. Увеличение оптической системы с бинокулярной насадкой в 5 крат. Поле зрения при таком увеличении не менее 30 мм. Средняя квадратическая погрешность идентификации точек одномасштабных снимков не более 0,03 мм.
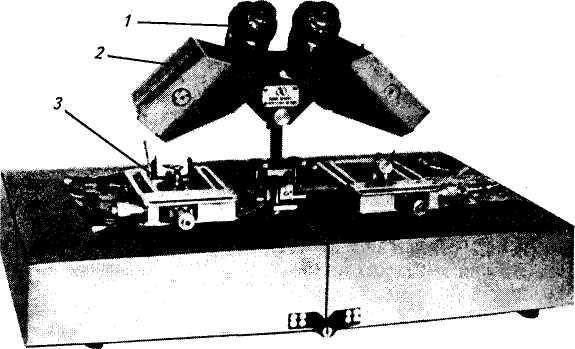
Рис. 9.7. Стереоскоп СММ:
1 — бинокуляр; 2 — зеркало; 3 — снимкодержатель
Технология измерения разностей продольных параллаксов заключается в следующем. Снимки ориентируют по начальному направлению — направлению, проходящему через собственную главную точку снимка и главную точку, перенесенную со смежного снимка. Снимки укладывают под наблюдательную систему так, чтобы их главные точки расположились на линии абсцисс прибора или параллельно ей. Перемещая снимки вдоль этой линии, а также вращая их в своей плоскости, добиваются получения стереоэффекта. Начальные направления при этом окажутся примерно на оси абсцисс. Уточняют ориентирование устранением остаточных поперечных параллаксов на главной точке правого снимка, вращая снимок левого, и наоборот. Затем последовательно переходят в зоны расположения объектов, высоты которых определяют. В общем случае в каждой зоне будут наблюдаться по перечные параллаксы. Здесь их перед измерением продольных параллаксов устраняют вертикальным перемещением одной из марок. Совмещают пространственную марку с поверхностью стерео-модели (при правильном ориентировании снимков обе марки сольются в одну воспринимаемую наблюдателем пространственно марку) вращением параллактического винта. Разность снимаемых со шкалы винта условных отсчетов при последовательном совмещении марки с точками, превышение которых определяют, будет величиной Ар для данной пары точек.
По значению возникающих в разных частях рабочей площади стереопар поперечных параллаксов можно судить о примерном значении углов наклона и разворота обрабатываемых снимков и соответственно устанавливать возможные расстояния между наблюдаемыми точками.