

3. Способы стереоскопического наблюдения снимков
Стереоскопически можно рассматривать снимки (негативы и позитивы), полученные при съемке с помощью кадровых фотографических систем; кадровых нефотографических съемочных систем, любые перекрывающиеся снимки, в цифровой форме.
В любом варианте разномасштабность наблюдаемой пары изображений не должна превышать 16 %. Используемые при наблюдении устройства должны обеспечить возможность раздельного наблюдения каждого снимка из пары левым и правым глазом.
Простейший и наиболее распространенный прибор для стереоскопического наблюдения снимков — стереоскоп. Рассмотрим принцип его устройства на примере отечественного линзо-зеркального стереоскопа (ЛЗ).
На планке основы прибора укреплены две пары зеркал — внешние 31 и 32 и внутренние 33 и 34, а также линзы Л1 и Л2 (рис. 2). Эту конструкцию на ножках устанавливают на стол.
Точками S1
и S2
на рисунке
обозначены передние узловые точки
глаз наблюдателя. Снимки Р1
и Р2
располагают
под зеркалами 31
и 32
так, чтобы
в центре поля зрения каждого глаза
оказались соответственные участки
снимков. Линейными перемещениями и
вращением снимков в их плоскостях
добиваются слияния изображений. 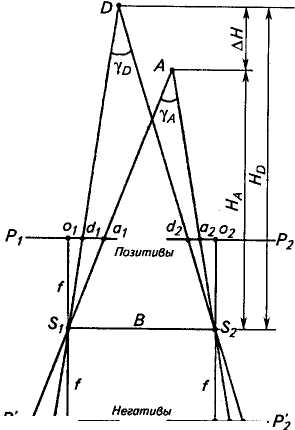 В
результате этого наблюдатель увидит
стереоскопическую модель — в
частности, точки а1
и а2,
а также d1
и d2
будут
восприниматься пространственно
точками А
и
D.
В
результате этого наблюдатель увидит
стереоскопическую модель — в
частности, точки а1
и а2,
а также d1
и d2
будут
восприниматься пространственно
точками А
и
D.
Рис.2. Принцип получения стереоскопического эффекта при наблюдении пары снимков
4. Поперечный и продольный параллаксы точек снимка
Совокупность проектирующих лучей, проходящих через центр проекции, называют связкой проектирующих лучей.
Базисной плоскостью называют плоскость, проходящую через базис съемки и любой проектирующий луч.
Если этим лучом является главный луч, то базисную плоскость называют главной. Очевидно, что в момент съемки любая пара соответственных лучей будет располагаться в одной базисной плоскости — условие компланарности.
Ранее мы использовали прямоугольную систему координат, осью абсцисс в которой служила главная вертикаль снимка, а осью ординат — любая из горизонталей. Это удобно при анализе метрических свойств снимков и определении возможностей использования их для непосредственного получения метрической информации: измерения площадей, длин линий и др.
При фотограмметрической обработке снимков применяют иную систему координат — осью абсцисс служит линия, соединяющая противоположные, расположенные вдоль направления маршрута координатные метки, а осью ординат — линия, соединяющая оставшуюся пару координатных меток. Началом в этой системе координат должна быть главная точка снимка. В общем случае точка пересечения указанных координатных осей может не совпадать с главной точкой. Значение несовпадения указывают в паспорте съемочной системы. Поправки, по необходимости, вводят в измеряемые на снимке координаты точек.
Пара горизонтальных
снимков Р1
и Р2,
полученных
с горизонтального базиса B=S1S0,,
с осями
абсцисс, лежащими на одной прямой
(идеальный
случай съемки), в
позитивном варианте, показана на
рисунке. Отвесная линия AD
(на местности
— столб, заводская труба и т. п.)
отобразилась на снимках отрезками a1d1
и a2d2,
направленными
в точки o1
и o2
соответственно,
так как точки надира п1
и п2
на горизонтальных
снимках совмещаются с главными
точками. Точки а1
и а2
будут
иметь равные ординаты
![]() ,
так как в
идеальном случае съемки след сечения
снимков базисной плоскостью будет
параллелен общему направлению осей
абсцисс этих снимков. Аналогичное
равенство будет справедливым для любой
пары соответственных точек.
,
так как в
идеальном случае съемки след сечения
снимков базисной плоскостью будет
параллелен общему направлению осей
абсцисс этих снимков. Аналогичное
равенство будет справедливым для любой
пары соответственных точек.
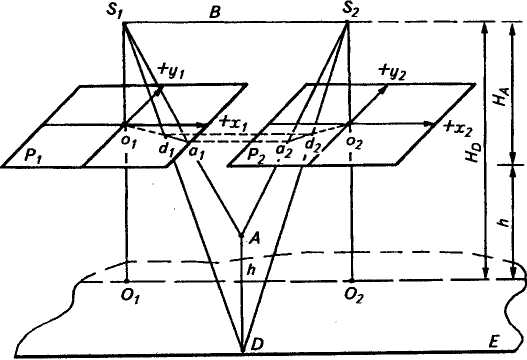
Рис. 3. Изображение отвесной линии на паре снимков идеального случая съемки
Разность ординат соответственных точек пары снимков называют поперечным параллаксом точки:
![]()
На реальных снимках
в общем случае q![]() 0.
Такие снимки, если значение q
превышает
определенные допуски, преобразуют
(трансформируют). Ординаты после
преобразования называют трансформированными
и обозначаются
0.
Такие снимки, если значение q
превышает
определенные допуски, преобразуют
(трансформируют). Ординаты после
преобразования называют трансформированными
и обозначаются
![]() и
и
![]() .
Для трансформированных ординат должно
выполняться условие:
.
Для трансформированных ординат должно
выполняться условие:
![]()
Из этого можно сделать вывод: поперечные параллаксы являются функцией некоторых величин, определяющих взаимное положение пары снимков (элементов взаимного ориентирования снимков).
Разность абсцисс пары соответственных точек на левом и правом снимках называют продольным параллаксом точки:
![]()
На реальных снимках абсциссы и соответственно продольные параллаксы будут искаженными (вспомним о смещении точек снимка вследствие его наклона). Следовательно, продольные параллаксы определяемых точек предварительно должны быть освобождены от искажений, т. е. трансформированы. Аналогично предыдущему трансформированные абсциссы и продольные параллаксы обозначают добавочным символом:
![]()