

1.4. Проходження випадкового сигналу через нелінійну ланку. Статистична лінеаризація
При діянні на НЛС стаціонарного випадкового сигналу виникає відповідний режим роботи, який характеризується, в першу чергу, оцінками математичного сподівання та дисперсії.
Для прикладу розглядається нелінійна ланка, яка має статичну характеристику з насиченням (рис.1.9,а,б). На вхід НЛ поступає стаціонарний випадковий сигнал
![]() (1.8)
(1.8)
з нормальним розподіленням, графік якого показано на рис.1.9,в. Вихідний сигнал
![]() (1.9)
(1.9)
має щільність ймовірності розподілення, показаний на рис.1.9,г.
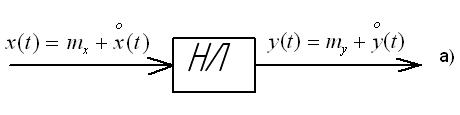
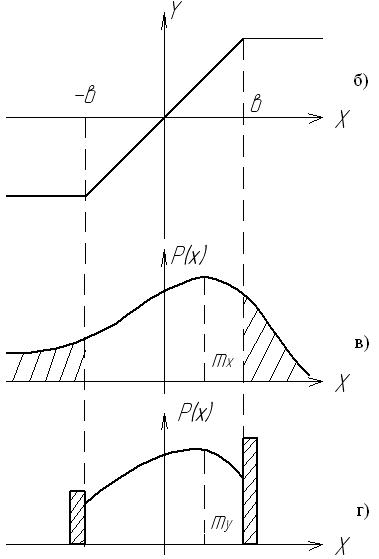
Рис.1.9. Змінювання розподілення сигналу
Значення х, які лежать
всередині лінійної частини характеристики
ланки, проходять без змін (коефіцієнт
передачі ланки прийнято рівним одиниці).
Всі значення
![]() дають на виході постійне значення y,
тобто ймовірність появи сигналу
дають на виході постійне значення y,
тобто ймовірність появи сигналу
![]() дорівнює нулю. Це відображається
нескінченно вузькими імпульсами на
межах діапазону
дорівнює нулю. Це відображається
нескінченно вузькими імпульсами на
межах діапазону
![]() ,
площі яких відповідають заштрихованим
площам на графіку рис.1.9,в. Ці імпульси
умовно показані кінцевої ширини і
висоти.
,
площі яких відповідають заштрихованим
площам на графіку рис.1.9,в. Ці імпульси
умовно показані кінцевої ширини і
висоти.
Якщо
змінюється mx,
то змінюються також і my
та Dy,
зокрема при збільшенні mx
величина my
також зростає, наближаючись до b,
а Dy
буде зменшуватись до нуля, коли mx
>>b. Якщо при mx=const
звужувати або розширяти криву р(х),
змінюючи Dх, то
будуть змінюватись як my,
так і Dy.
При звуженні кривої р(х) величина my
буде збільшуватись, прямуючи до mx,
коли крива р(х) буде входити в діапазон
![]() ,
а дисперсія Dх і Dy
,
а дисперсія Dх і Dy
![]() .
.
Таким чином, при проходженні випадкового сигналу через нелінійну ланку закон розподілення щільності ймовірності змінюється, а my та Dy кожна залежать від mх та Dх, тобто принцип суперпозиції не виконується.
Крім того, наявність випадкової складової сигналу приводить до згладжування нелінійної залежності між виходом і входом для середнього значення (детермінованої складової). Таким чином, випадкова складова вхідного сигналу створює ефект лінеаризації нелінійної ланки для детермінованої складової сигналу. В цьому випадку навіть релейна система поводить себе як ланка неперервної дії. При збільшенні mх передача ланкою випадкової складової ослаблюється за рахунок того, що ланка насичується детермінованою складовою сигналу.
На викладених закономірностях базується наближений метод статистичної лінеаризації НЛС, який полягає в заміні нелінійної системи еквівалентною лінійною щодо реакції на заданий вхідний сигнал. Таким чином, необхідно підібрати таку лінійну еквівалентну ланку, яка з достатньою точністю відтворює вихідний сигнал нелінійної ланки.
Приймається, що на вході та виході нелінійної ланки діють відповідно сигнали, які описуються залежностями (1.8), (1.9). Тоді для лінійної еквівалентної ланки можна записати:
![]() (1.10)
(1.10)
де: k0, k1 – коефіцієнти статистичної лінеаризації (рис.1.10).
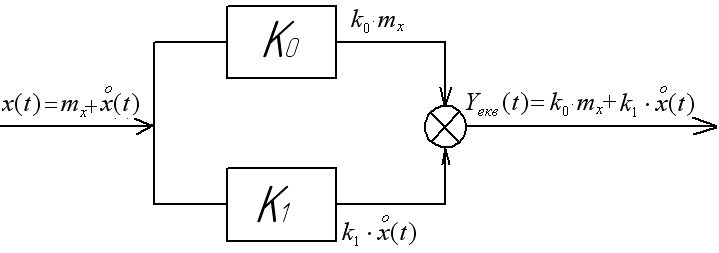
Рис.1.10. Структура еквівалентної лінійної ланки
Для заміни нелінійної ланки еквівалентною лінійною необхідно знайти вирази для коефіцієнтів k0 і k1. Часто ці коефіцієнти знаходять, використовуючи такі критерії:
забезпечення незмінних значень:
![]() (1.11)
(1.11)
мінімум середньоквадратичного відхилення:
![]() (1.12)
(1.12)
За обома критеріями коефіцієнт
![]() (1.13)
(1.13)
а другий коефіцієнт
![]() - за першим критерієм (1.14)
- за першим критерієм (1.14)
![]() - за другим критерієм
(1.15)
- за другим критерієм
(1.15)
Формули
(1.14), (1.15) строго виводяться, а знак у
виразі (1.14) приймається так: k1>0,
коли
в точці х=
mx
функція f(x)
зростає,
і k1<0
– в
протилежному випадку. Можна приймати
середнє значення k1,
визначене за формулами (1.14), (1.15).
Наближеність такого методу лінеаризації
пов’язана з припущенням щодо нормального
закону розподілення вхідного сигналу
та нехтуванням його змінювання нелінійною
ланкою. Еквівалентна лінійна ланка
точно відтворює змінювання mx
і наближено -
![]()