

1.6. Методи дослідження стійкості нелінійних систем
Єдиним методом точного дослідження стійкості НЛС є метод фазових траєкторій, однак він обмежується системами другого порядку. В сучасних умовах при дослідженні стійкості НЛС доцільно орієнтуватись на застосування комп’ютерного моделювання.
Основоположними роботами в галузі стійкості НЛС є дослідження російського вченого Ляпунова О.М., які складають основу загальної теорії стійкості. Крім того, використовуються критерії абсолютної стійкості В.М.Попова, метод гармонійної лінеаризації для дослідження автоколивань і інш.
В загальній постановці дослідження стійкості НЛС використовуються методи:
визначення достатніх умов стійкості на основі критеріїв, які дозволяють виділити частину повної області стійкості;
наближеного дослідження.
В першому випадку наперед відомий знак похибки у визначенні межі стійкості, а сама похибка відноситься до запасу стійкості, хоча її величина невідома і може бути як завгодно великою. У другому випадку знак похибки невідомий, але є можливість оцінити зверху її абсолютну величину.
О.М. Ляпунов в 1892 році дав визначення, яке до цього часу є загально визнаним, класичним і складає основу теорії стійкості нелінійних систем (в технічній літературі - стійкість по Ляпунову):
Незбурений рух є стійким, якщо при
достатньо малих початкових збуреннях
викликаний ним збурений рух як завгодно
мало відрізняється від незбуреного;
при цьому рух асимптотично стійкий,
якщо при
![]() збурений рух прямує до незбуреного.
збурений рух прямує до незбуреного.
В такій постановці незбурений рух – будь-який режим роботи системи щодо стійкості. У фазовому просторі – це початок координат, а в загальному випадку цим режимом може бути як усталений статичний чи динамічний режими, так і неусталений режим. Як збурення Ляпунов розглядав лише ненульові початкові умови, які відповідають початковому зміщенню зображаючої точки з початку координат в певну точку фазового простору при незмінних зовнішніх діяннях, які відповідають незбуреному рухові. З практичної точки зору це незручне визначення збурення, але при достатньо загальних умовах режим, асимптотично стійкий за Ляпуновим, буде стійким при розгляді збурення, яке відповідає відхиленню зовнішніх діянь.
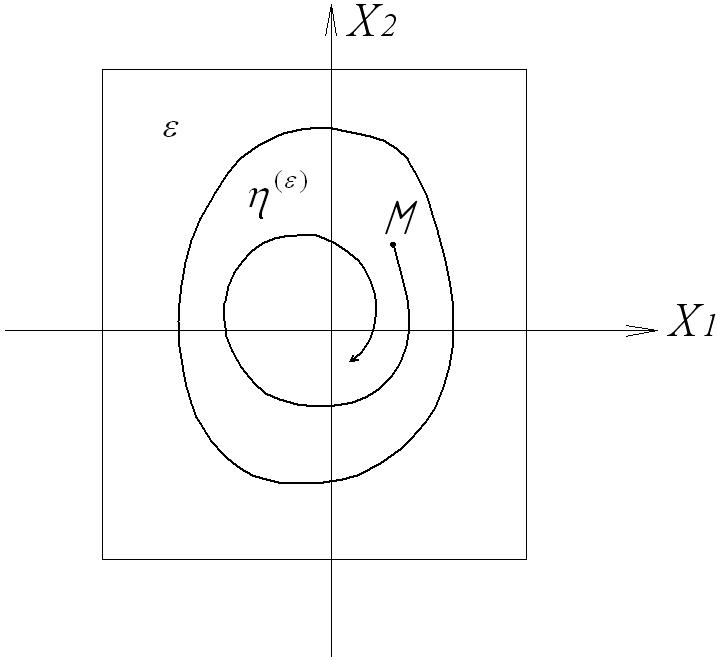
Рис. 1.14. Оцінка стану рівноваги НЛС
Графічна інтерпретація стійкості за Ляпуновим показана на рис 1.14: стан рівноваги стійкий, якщо для будь-якої заданої області допустимих відхилень ε можна вказати таку допоміжну область η (ε), щоб жодний рух, який починається в цій області, не досягав межі ε. Це значить, що при заданій області допустимих відхилень ε визначається область початкових умов η. При цьому для стійкої системи не обов’язково вимагати повернення до попереднього стану рівноваги, а достатньо, щоб рух зображаючої точки відбувався в межах області допустимих відхилень ε. Якщо ж система не тільки не виходить за межі допустимої області, а повертається до попереднього стану рівноваги, то таку систему називають асимптотично стійкою. Стійкість рівноваги за Лапуновим гарантує стійкість “в малому”, але система може бути нестійкою “у великому” (рис. 1.15).
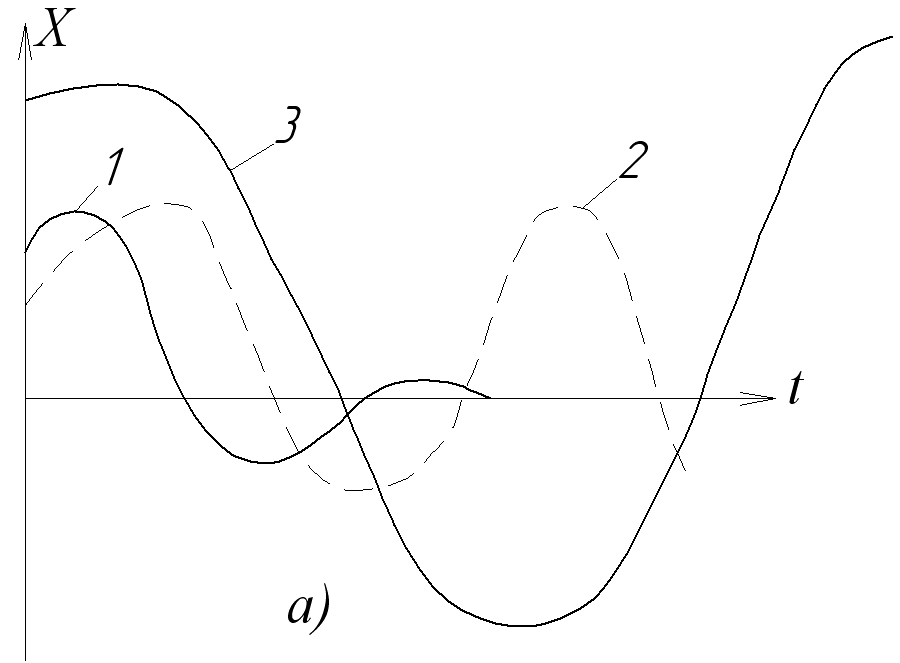

Рис.1.15. До оцінки стійкості НЛС
а) перехідні процеси; б) фазові траєкторії
Перехідним процесам 1,2,3 відповідають фазові траєкторії 1’, 2’,3’.
Ляпуновим О.М. розроблено два методи дослідження стійкості НЛС. Перший метод використовується лише для дослідження стійкості “в малому” тих систем, які можна лінеаризувати шляхом розкладання функцій нелінійності в ряд Тейлора. Цим самим вперше було доведено, що стійкість нелінійної системи можна оцінювати за стійкістю лінеаризованої системи. Перший метод Ляпунова включає кілька теорем, головними висновками яких є:
якщо лінійна система першого наближення (лінеаризована система) стійка, то стійкою є і вихідна (досліджувана) нелінійна система;
якщо лінеаризоване система нестійка, то нестійка і досліджувана нелінійна система;
якщо лінеаризоване система знаходиться на межі стійкості, то зробити висновок щодо стійкості нелінійної системи неможливо (вона може бути як стійкою, так і нестійкою).
Перших два висновки дають можливість застосувати при дослідження нелінійної системи методи теорії лінійних систем, що значно спрощує проблему. При цьому необхідно враховувати, що перший метод Ляпунова застосовується для дослідження стійкості “в малому”. Третій висновок привів до необхідності розробки спеціального метода, який отримав назву прямого метода дослідження стійкості НЛС,
Другий метод Ляпунова О.М. є найбільш загальним і дозволяє визначити достатні умови стійкості, тобто виділити частину загальної області стійкості.

Рис. 1.16. До прямого метода Ляпунова О.М.
Головну ідею метода зручно пояснити, використовуючи фазовий простір (рис.1.16). Розглядається замкнена поверхня довільної форми, яка описується рівнянням:
![]() (1.28)
(1.28)
де:
![]() -
функція координат системи х1,
х2...хn;
-
функція координат системи х1,
х2...хn;
C - параметр, який визначає величину функції.
Кожному
значенню С відповідає певна поверхня
у фазовому просторі. При зменшенні С
поверхня стискується так, що при
![]() поверхня стягується в початок координат.
Тоді достатньою умовою стійкості
системи буде необхідність руху точки
М лише в середину поверхні, тобто в
напрямку зменшення С. Це означає, що
вздовж фазових траєкторій похідна
поверхня стягується в початок координат.
Тоді достатньою умовою стійкості
системи буде необхідність руху точки
М лише в середину поверхні, тобто в
напрямку зменшення С. Це означає, що
вздовж фазових траєкторій похідна
![]() буде від’ємною.
буде від’ємною.
Таким
чином, достатні умови стійкості за
Ляпуновим формулюються так: якщо для
нелінійної системи можна підібрати
таку знаковизначену функцію
![]() щоб її похідна
,
взята вздовж фазової траєкторії, також
була знаковизначеною (або знакопостійною),
але мала знак, протилежний знаку V,
то система стійка, причому при
знаковизначеній функції
-
асимптотично стійка.
щоб її похідна
,
взята вздовж фазової траєкторії, також
була знаковизначеною (або знакопостійною),
але мала знак, протилежний знаку V,
то система стійка, причому при
знаковизначеній функції
-
асимптотично стійка.
Знаковизначена функція у всіх точках області в околі початку координат зберігає знак і не дорівнює нулю, крім початку координат, наприклад:
![]()
Знакостійна функція не змінює знак, але може обертатись в нуль не лише на початку координат, наприклад:
![]()
Знакозмінна функція змінює знак в околі початку координат, наприклад
![]() є
додатньою для точок зправа від прямої
х1=
-х2
та від’ємною –зліва від прямої.
є
додатньою для точок зправа від прямої
х1=
-х2
та від’ємною –зліва від прямої.
Труднощі використання прямого метода Ляпунова пов’язані з відсутністю загальних правил формування функцій V. Варто підкреслити, що функція Ляпунова – це не конкретна функція, а така, яка задовольняє умовам задачі. Крім того, поза межами області стійкості, визначеними функціями V, нічого не можна сказати про стійкість, тобто не відомо, яка частина повної області стійкості знайдена.
При дослідженні стійкості нелінійних систем використовується також критерій абсолютної стійкості В.М.Попова, коли нелінійність задається не конкретним видом, а належністю до певного класу. Статичні характеристики (рис.1.17) вважаються одного класу, якщо вони розташовані в секторі, обмеженому прямою з кутовим коефіцієнтом kн. Така постановка задачі з математичної точки зору дозволяє значно спростити дослідження системи, а також має практичне значення, коли нелінійності задані неточно або змінюються в процесі роботи.
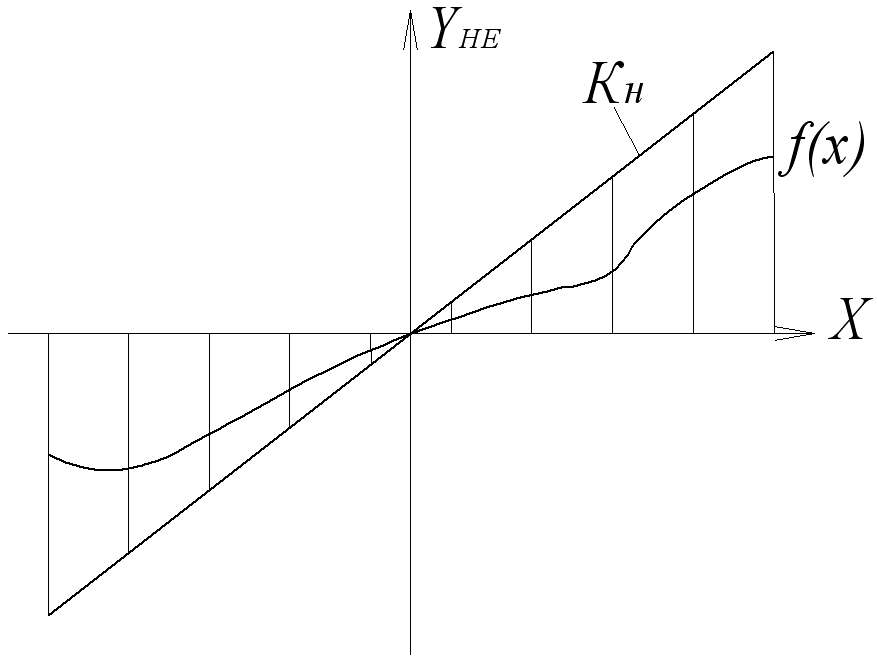
Рис.1.17. Клас нелінійних характеристик
Критерій В.М.Попова відноситься до частотних, для чого записується частотна характеристика лінійної частини:
![]() (1.29)
(1.29)
З виразу (1.29) отримують модифіковану частотну характеристику:
![]() (1.30)
(1.30)
де: Tm – нормуючий множник, - поточна частота; Tm=1с.
Для
нелінійної системи, яка складається з
лінійної частини з АФХ
![]() і нелінійного елемента з характеристикою
f(x),
розташованою в секторі [0, kн],
критерій абсолютної стійкості
формується так:
і нелінійного елемента з характеристикою
f(x),
розташованою в секторі [0, kн],
критерій абсолютної стійкості
формується так:
для абсолютної стійкості рівноваги
достатньо, щоб модифіково-частотна
характеристика
![]() не охоплювала точку (-1/ kн;0)
і через цю точку можна було провести
пряму, яка не перетинає характеристику
.
не охоплювала точку (-1/ kн;0)
і через цю точку можна було провести
пряму, яка не перетинає характеристику
.
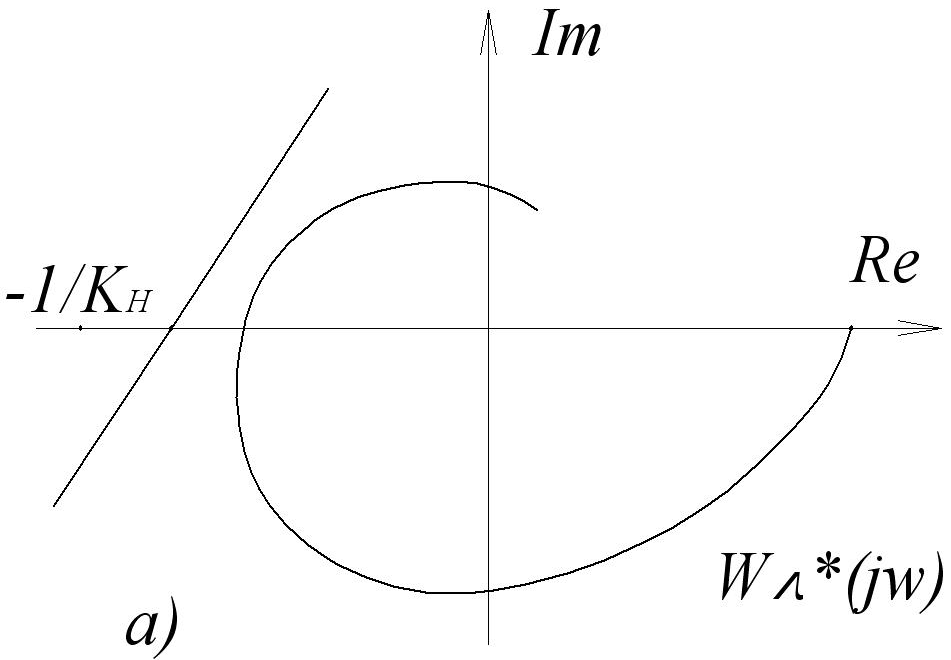
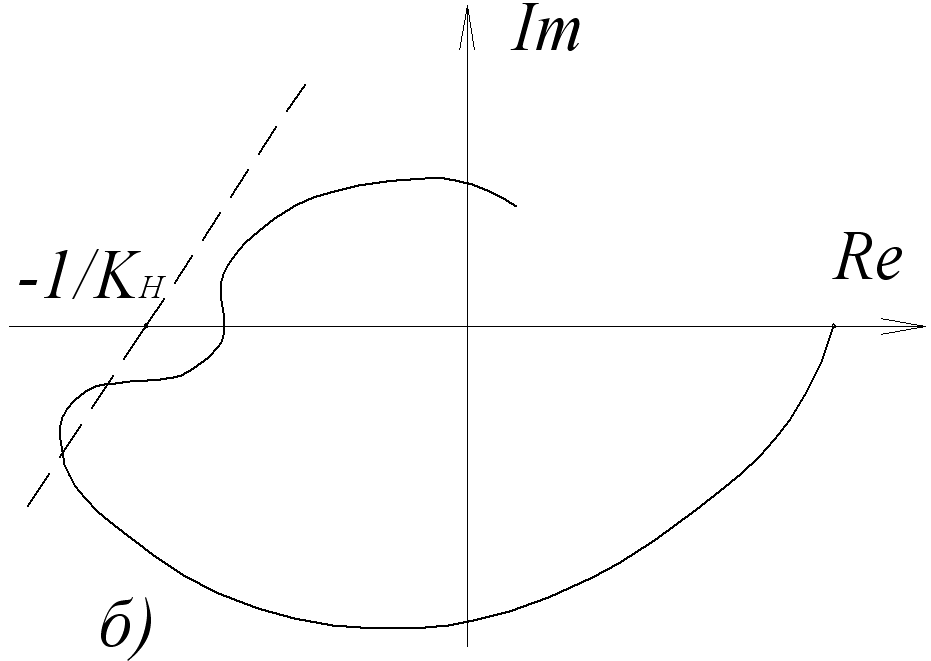
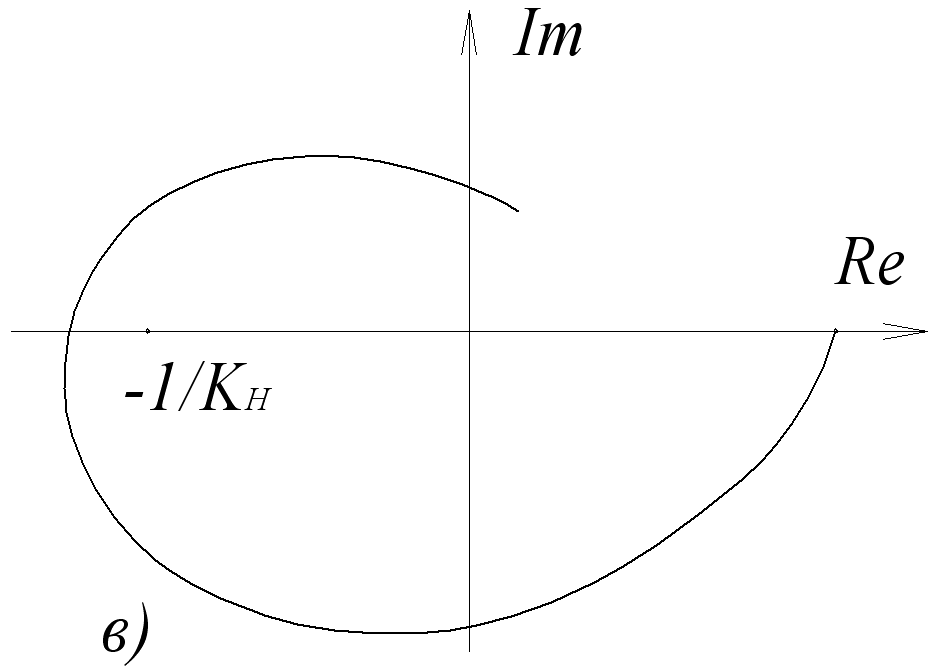
Рис.1.18. Критерій абсолютної стійкості В.М.Попова
На рис.1.18 показані випадки: а) система стійка; б,в) нестійка.
За допомогою критерія В.М.Попова вирішується і обернена задача: будується задана характеристика , потім проводиться якомога ближче до неї пряма так, щоб отримати найменший відрізок [0;-1/ kн] і таким чином знаходять допустиме значення кутового коефіцієнта kн. За нахилом прямої, “притиснутої” до кривої , можна зробити висновок щодо допустимого класу нелінійності: якщо пряма вертикальна, то нелінійність може бути лише однозначною, а якщо нахилена – може бути довільною, в тому числі із гістерезисом.