

3.2. Релейні (позиційні) системи
Релейними (позиційними) системами називають такі, в яких функціонує релейний елемент, сигнал на виході якого може приймати два або більше фіксованих значень. Відповідно до цього регулюючий орган займає також два або більше фіксованих положень (позицій). За цією ознакою виділяють двох-, трьох- та багатопозиційні релейні системи. Релейні системи є найбільш простими та дешевими, що зумовлює їх широке розповсюдження, наприклад, для побутових холодильників. Ці системи мають ряд особливостей:
релейні системи є нелінійними, робочий режим яких характеризується коливальними процесами (автоколиваннями) певної амплітуди і частоти;
за допомогою релейних елементів (регуляторів) забезпечується максимальне форсування вихідних сигналів за рахунок змінювання положень, що дає можливість застосовувати їх в системах, оптимальних за швидкодією;
застосування релейних елементів може забезпечити ефект вібраційної лінеаризації, що розглядалось в розділі “Нелінійні системи”.
Названі
особливості визначають область
застосування релейних систем, тому що
режим автоколивань недопустимий для
більшості технологічних об’єктів. В
технічній літературі рекомендується
оцінювати попередню можливість
застосування релейного регулятора за
відношенням часу запізнювання об’єкта
![]() до його постійної часу -
до його постійної часу -
![]()
Таблиця 3.1
Статичні характеристики релейних регуляторів
№ п/п |
Регулятор |
Статична характеристика |
Рівняння регулятора |
1. |
Ідеальний релейний |
|
|
2. |
Релейний із зоною нечутливості |
|
|
3. |
Ідеальний релейний |
|
|
4. |
Релейний із зоною нечутливості |
|
|
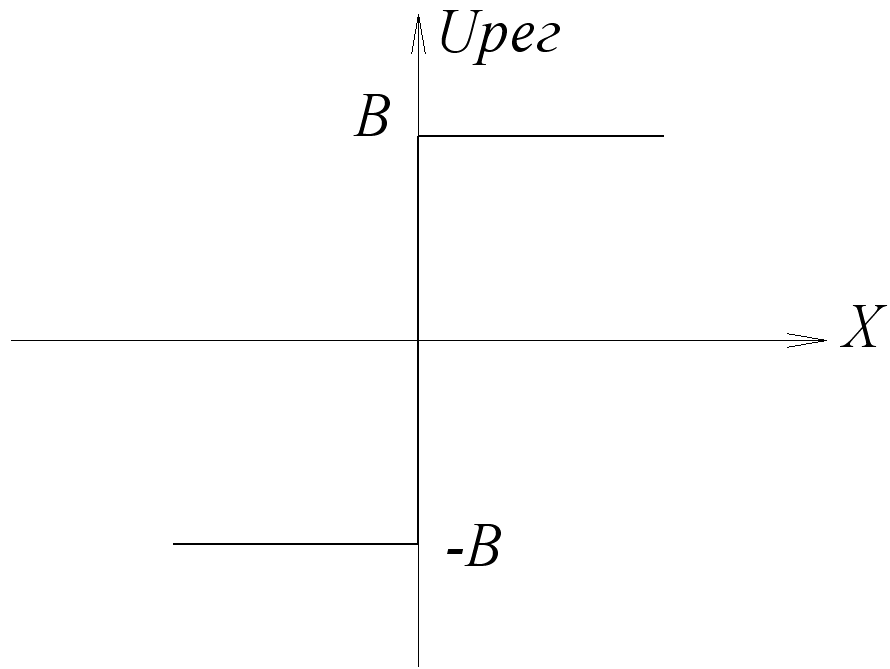

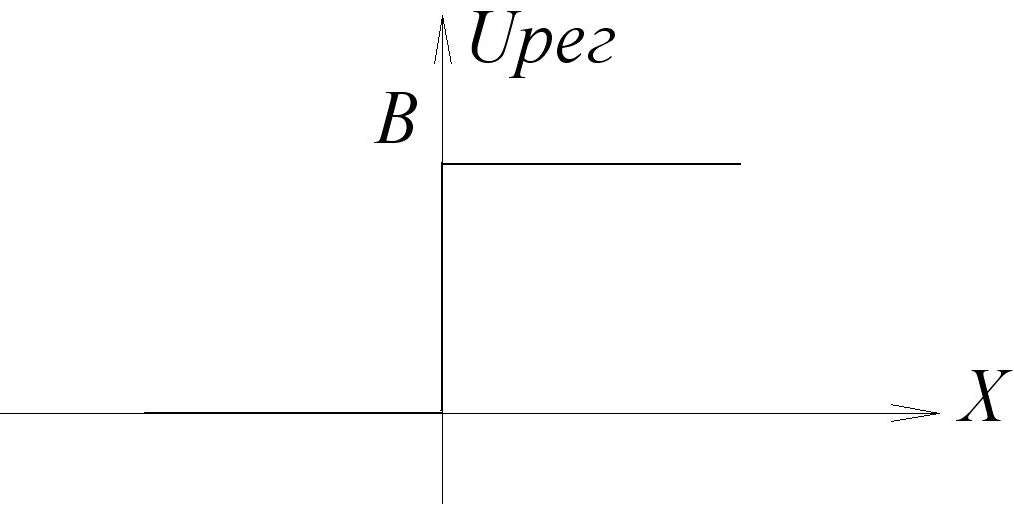

Статичні характеристики
релейних регуляторів наведені
в табл.3.1. Величина 2b(-b;b)
визначає зону неоднозначності щодо
значення Uрег, яке
залежить від знака похідної
![]() Ця величина є настройкою релейного
регулятора (в технічній літературі
позначається
Ця величина є настройкою релейного
регулятора (в технічній літературі
позначається
![]() ).
Настройка обирається такою, щоб при
переключення регулюючого органа керуюче
діяння гарантовано перевищувало дію
збурення, тоді відхилення Х буде
зменшуватись, а регулюючий орган
залишається в такому є положенні до
того часу, коли
).
Настройка обирається такою, щоб при
переключення регулюючого органа керуюче
діяння гарантовано перевищувало дію
збурення, тоді відхилення Х буде
зменшуватись, а регулюючий орган
залишається в такому є положенні до
того часу, коли
![]() досягне
Хmin. Перехідні
процеси в релейних системах показані
в табл..3.2.
досягне
Хmin. Перехідні
процеси в релейних системах показані
в табл..3.2.
Таблиця 3.2
Перехідні процеси в релейних системах
№ п/п |
Релейний регулятор із зоною нечутливості |
Перехідний процес |
1. |
Астатичний об’єкт першого порядку |
|
2. |
Статичний об’єкт першого порядку |
|
3. |
Статичний
об’єкт порядку
|
|
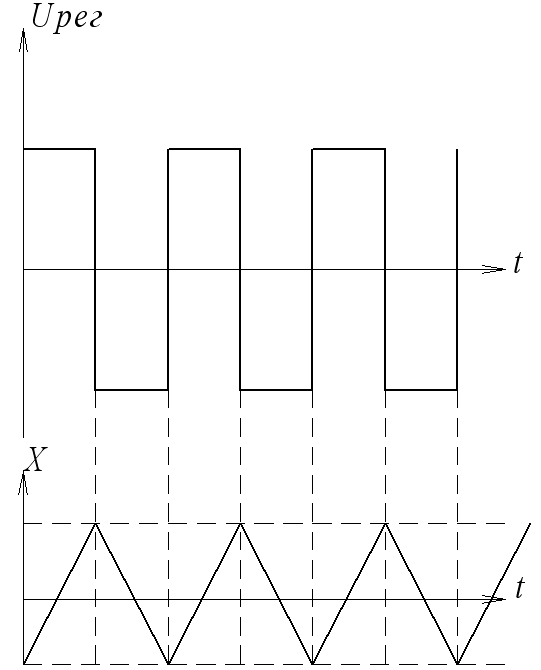
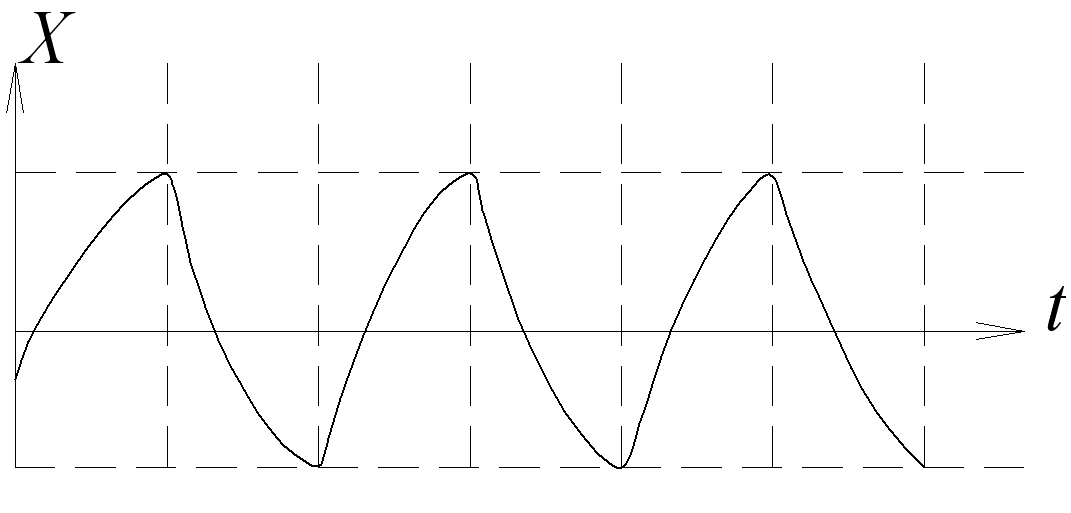
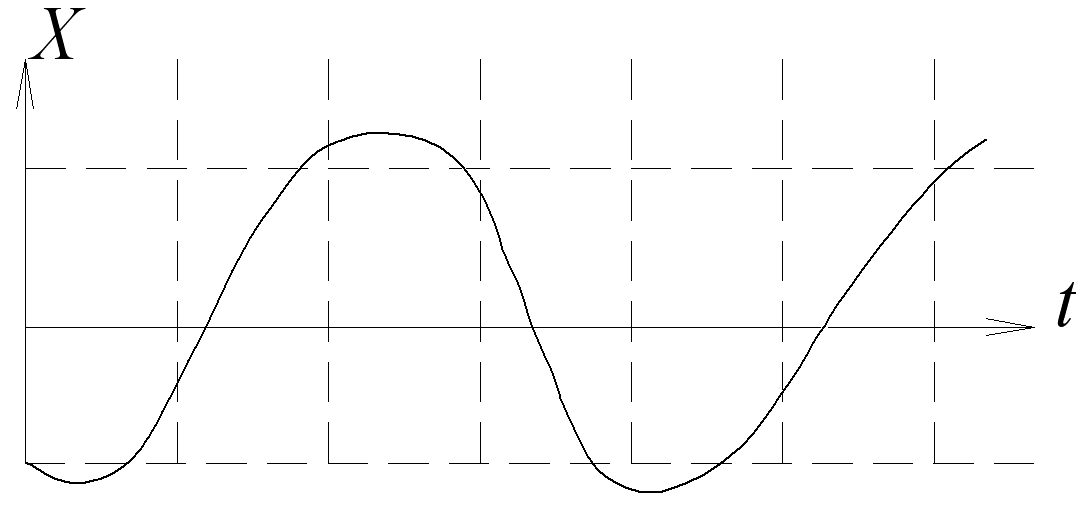
Перехідні процеси в релейних системах (автоколивання) характеризуються крім амплітуди і частоти зміщенням середнього значення від заданого Хзд при зміні навантаження і залежать від ряду факторів: параметрів об’єкта (постійна часу Т, час запізнювання , навантаження); настройки регулятора 2b ( ).