

Цветовые модели hsv и hls
Приведенные модели не охватывают всего диапазона видимого цвета, поскольку их цветовой охват — это лишь треугольник на графике МКО, вершинам которого соответствуют базовые цвета. Они являются аппаратно ориентированными, т. е. соответствуют технической реализации цвета в устройствах графического вывода. Но психофизиологическое восприятие света определяется не интенсивностью трех первичных цветов, а цветовым тоном, насыщенностью и светлотой. Цветовой тон позволяет различать цвета, насыщенность задает степень "разбавления" чистого тона белым цветом, а светлота — это интенсивность света в целом. Поэтому для адекватного нашему восприятию подбора оттенков более удобными являются модели, в числе параметров которых присутствует тон (Hue). Этот параметр принято измерять углом, отсчитываемым вокруг вертикальной оси. При этом красному цвету соответствует угол 00, зеленому — 1200, синему — 2400, а дополняющие друг друга цвета расположены один напротив другого, т. е. угол между ними составляет 1800. Цвета CMY расположены посредине между составляющими их компонентами RGB. Существует две модели, использующие этот параметр.
Модель HSV (Hue, Saturation, Value, или тон, насыщенность, количество света) можно представить в виде световой шестигранной пирамиды (рис. 2.10), по оси которой откладывается значение V, а расстояние от оси до боковой грани в горизонтальном сечении соответствует параметру S (за диапазон изменения этих величин принимается интервал от нуля до единицы). Значение S равно единице, если точка лежит на боковой грани пирамиды. Шестиугольник, лежащий в основании пирамиды представляет собой проекцию цветового куба в направлении его главной диагонали (рис. 2.11).


Рис. 2.10. Цветовое пространство HSV Рис. 2.11. Цветовое пространство HLS
Преобразование цветового пространства HSV в RGB осуществляется непосредственно с помощью геометрических соотношений между шестигранной пирамидой и кубом.
Цветовая модель HLS (Hue, Lightness, Saturation, или тон, светлота, насыщенность) является расширением модели HSV. Здесь цветовое пространство уже представляется в виде двойной пирамиды (рис. 2.13), в которой по вертикальной оси откладывается L (светлота), а остальные два параметра задаются так же, как и в предыдущей модели. В литературе эти пирамиды иногда называют шестигранным конусом.
На рис. 2.12 и 2.13 приведены блок-схемы преобразования моделей HSV и HLS в модель RGB. Алгоритмы обратного преобразования предлагаются читателю в качестве упражнения.
В первом алгоритме используется функция Ent, означающая целую часть числа. Кроме того, используется операция присваивания для векторов. Константа ndf (сокращенное от выражения "not defined") используется при входе в алгоритм для того, чтобы выяснить, задано ли значение переменной H. Например, по соглашению ndf может быть некоторым отрицательным значением, так как тон — это всегда положительная величина. Во втором алгоритме используется вспомогательная функция Value(H, M1, M2) для вычисления значения компоненты R, G или B в зависимости от ситуации. Ее алгоритм таков:
Приведение H к заданному диапазону:
Пока H<0 H=H+360
Пока H>360 H=H-360
Определение координат
Если H<60 то Value=M1+(M2-M1)*H/60
Если 60<=H<180 то Value=M2
Если 180<=H<240 то Value=M1+(M2-M1)*(240-H)/60
Если 240<=H то Value=M1

Рис. 2.12. Преобразование модели HSV в RGB
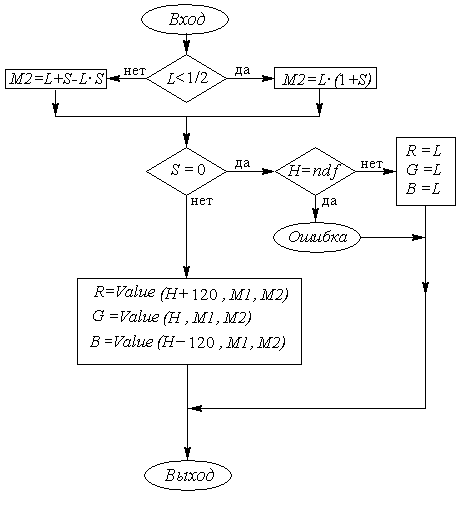
Рис. 2.13. Преобразование модели HLS в RGB