

Косоугольные проекции
Рассмотрим косоугольную проекцию на
плоскость XOY, при
которой орт
![]() переходит в вектор
переходит в вектор
![]() ,
т. е. направление проекции задается
вектором
,
т. е. направление проекции задается
вектором
![]() .
Такое преобразование в пространстве
однородных координат можно задать с
помощью матрицы
.
Такое преобразование в пространстве
однородных координат можно задать с
помощью матрицы
 .
.
В проекции кавалье вектор
![]() переходит в вектор
переходит в вектор
![]() ,
а в кабинетной проекции — в вектор
,
а в кабинетной проекции — в вектор
![]() ,
причем в обеих проекциях
,
причем в обеих проекциях
![]() .
.
Центральные проекции
П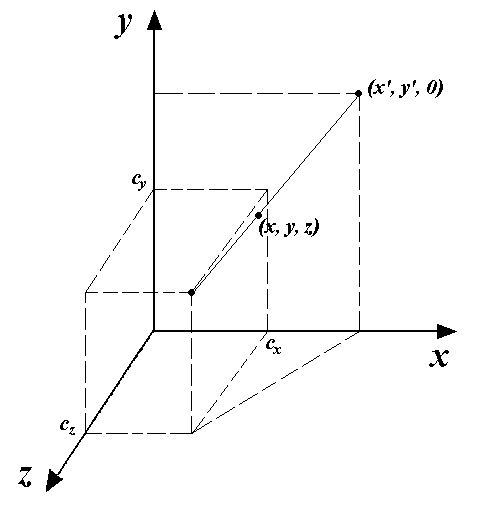 редположим,
что центр проектирования находится в
точке
редположим,
что центр проектирования находится в
точке
![]() ,
а картинная плоскость совпадает с
плоскостью XOY. Возьмем
произвольную точку изображаемого
объекта
,
а картинная плоскость совпадает с
плоскостью XOY. Возьмем
произвольную точку изображаемого
объекта
![]() и определим ее проекцию на выбранную
плоскость (рис. 7.7). Прямую, проходящую
через точки
и определим ее проекцию на выбранную
плоскость (рис. 7.7). Прямую, проходящую
через точки
![]() и
и
![]() зададим в параметрическом виде:
зададим в параметрическом виде:
![]() (7.1).
(7.1).
Т
Рис. 7.7. Центральная проекция
на плоскость XOY
![]() ,
,
откуда определяем значение параметра t, при котором точка прямой принадлежит координатной плоскости:
 .
.
Подставляя это значение в формулу (7.1), мы получим координаты проекции точки :
Рис. 12
Фактором, влияющим на перспективное изменение размеров, является деление наличие координаты z в знаменателе. Чем ближе оказывается точка к центру проекции, тем больше знаменатель, а соответственно, и координаты точки.
Мы
будем рассматривать ситуацию, когда
центр проекции лежит на оси OZ,
а сама ось направлена от наблюдателя к
проекционной плоскости, т. е.
![]() .
Тогда формулы (7.2) приобретают вид
.
Тогда формулы (7.2) приобретают вид
 (7.3)
(7.3)
В
однородных координатах такое преобразование
можно записать с помощью двух операций.
Сначала умножаем матрицу проективного
преобразования
![]() на исходную точку и получаем точку в
четырехмерном пространстве:
на исходную точку и получаем точку в
четырехмерном пространстве:
 . (7.4)
. (7.4)
Затем проецируем эту точку в пространство однородных координат путем деления на четвертую компоненту:
![]() .
.
Посмотрим
теперь, что происходит с пучком
параллельных прямых под действием
матрицы проектирования. Пусть задан
пучок прямых, параллельных вектору
![]() .
Тогда параметрическое уравнение прямой,
принадлежащей этому пучку, имеет вид
.
Тогда параметрическое уравнение прямой,
принадлежащей этому пучку, имеет вид
![]() .
.
Из формулы (7.4) следует, что в результате проектирования получим множество точек
![]() .
.
Переходя к однородным координатам и
умножив числитель и знаменатель каждой
дроби на
,
получим точки
![]() вида
вида
![]() .
.
Теперь в каждой компоненте вектора числитель и знаменатель поделим на :
![]() .
.
Переходя к пределу при
![]() ,
получим точку
,
получим точку
![]()
Таким образом, получаем, что после
проектирования пучок параллельных
прямых пересекается в точке схода
![]() .
Понятно, что у каждого пучка своя точка
схода. Если пучок прямых параллелен
плоскости XOY, т. е.
.
Понятно, что у каждого пучка своя точка
схода. Если пучок прямых параллелен
плоскости XOY, т. е.
![]() ,
то точка схода оказывается на бесконечности,
а значит, прямые остаются параллельными.
,
то точка схода оказывается на бесконечности,
а значит, прямые остаются параллельными.
Для построения перспективной проекции с несколькими точками схода используется матрица перспективного преобразования без проектирования
 .
.
Теперь точки пространства сначала подвергаются перспективному преобразованию, а затем осуществляется проекция.
Определим точки схода для прямых,
параллельных осям координат. Для прямых
![]() результатом проективного преобразования
будет множество точек
результатом проективного преобразования
будет множество точек
![]() ,
где
,
где
![]() .
При
получим точку с координатами
.
При
получим точку с координатами
![]() .
При проекции на плоскость XOY
получим точку
.
При проекции на плоскость XOY
получим точку
![]() .
Пучок прямых
.
Пучок прямых
![]() перейдет в
перейдет в
![]() ,
,
![]() ,
а точкой схода для него будет
,
а точкой схода для него будет
![]() ,
которая при проектировании перейдет в
точку, лежащую на оси OX
,
которая при проектировании перейдет в
точку, лежащую на оси OX
![]() .
Аналогично для пучка прямых, параллельных
оси OY получим точку
схода на оси OY
.
Аналогично для пучка прямых, параллельных
оси OY получим точку
схода на оси OY
![]() .
Эти три точки на плоскости являются
главными точками схода.
.
Эти три точки на плоскости являются
главными точками схода.