

Клиппирование многоугольников
О
Рис. 6.8. Отсечение невыпуклого
многоугольника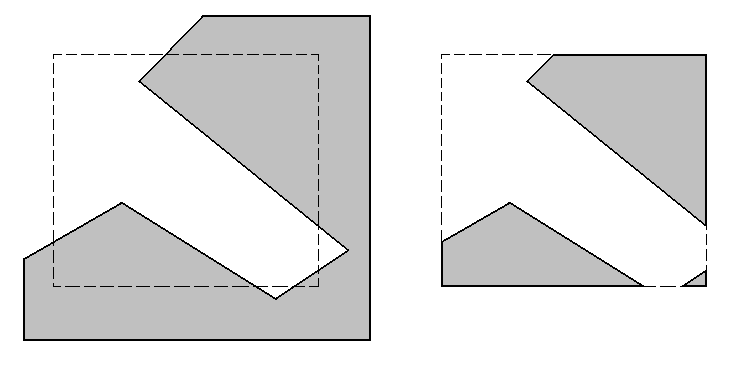
![]() ,
соответствующих ребрам
,
соответствующих ребрам
![]() ,
,
![]() ,
…,
,
…,
![]() ,
,
![]() .
Для отсечения такого многоугольника
прямоугольным окном можно применить
алгоритм, предложенный Сазерлендом и
Ходжменом. Идея его заключается в
последовательном отсечении части
многоугольника прямыми, соответствующими
сторонам окна. Результатом его работы
является упорядоченный список вершин,
лежащих в видимой части окна. На каждом
шаге алгоритма образуется некоторая
промежуточная фигура, также представленная
упорядоченным списком вершин и ребер.
Пример таких последовательных отсечений
показан на рис. 5.9. В процессе отсечения
последовательно обходится список
вершин, причем каждая очередная точка
за исключением первой рассматривается
как конечная точка ребра, начальной
точкой которого является предшествующая
точка из списка. Порядок, в котором
рассматриваются стороны окна, не имеет
значения. В процессе обхода формируется
список новых вершин многоугольника.
.
Для отсечения такого многоугольника
прямоугольным окном можно применить
алгоритм, предложенный Сазерлендом и
Ходжменом. Идея его заключается в
последовательном отсечении части
многоугольника прямыми, соответствующими
сторонам окна. Результатом его работы
является упорядоченный список вершин,
лежащих в видимой части окна. На каждом
шаге алгоритма образуется некоторая
промежуточная фигура, также представленная
упорядоченным списком вершин и ребер.
Пример таких последовательных отсечений
показан на рис. 5.9. В процессе отсечения
последовательно обходится список
вершин, причем каждая очередная точка
за исключением первой рассматривается
как конечная точка ребра, начальной
точкой которого является предшествующая
точка из списка. Порядок, в котором
рассматриваются стороны окна, не имеет
значения. В процессе обхода формируется
список новых вершин многоугольника.

Рис. 5.9. Последовательные шаги клиппирования произвольного многоугольника
На первом шаге для первой вершины в списке определяется ее принадлежность видимой области. Если она видима, то она становится первой точкой первого обрабатываемого ребра и заносится в список новых вершин. Если же она невидима, то в список новых вершин не заносится, но все равно становится первой точкой ребра.
Для анализируемого ребра возможны четыре случая расположения относительно окна.
Ребро полностью видимо. Очередная точка заносится в список новых вершин (предыдущая уже должна находиться в этом списке, поскольку ребро полностью видимо).
Ребро полностью невидимо. Никаких действий не производится.
Ребро выходит из области. Находится точка пересечения ребра со стороной окна и заносится в список новых ребер.
Ребро входит в область. Также ищется точка пересечения со стороной окна и заносится в список новых вершин. Конечная точка тоже заносится в список новых вершин.
В этом алгоритме постоянно приходится
определять видимость точки по отношению
к конкретному ребру отсекающего окна.
Окно также можно задать в виде
упорядоченного списка вершин. Если
обход вершин окна осуществляется по
часовой стрелке, то его внутренняя
область будет расположена по правую
сторону от границы. При этом расположение
точки
![]() относительно прямой, которой принадлежит
ребро, можно устанавливать различными
способами.
относительно прямой, которой принадлежит
ребро, можно устанавливать различными
способами.
1) Выбирается начальная точка
![]() данного ребра и строится вектор
данного ребра и строится вектор
![]() и вектор внутренней нормали
к границе (ребру) окна. Вычисляется
скалярное произведение
и вектор внутренней нормали
к границе (ребру) окна. Вычисляется
скалярное произведение
![]() .
Если
.
Если
![]() ,
то точка
является видимой.
,
то точка
является видимой.
2) Строится пространственный вектор
(третью координату можно положить равной
нулю). Вектор
(также пространственный, лежащий в той
же плоскости, что и
)
направлен вдоль ребра (с учетом направления
обхода). Вычисляется векторное произведение
![]() .
Если координата
.
Если координата
![]() у вектора
положительна, то точка
лежит справа от ребра (является видимой).
у вектора
положительна, то точка
лежит справа от ребра (является видимой).
3) Выписывается каноническое уравнение прямой, проходящей через ребро:
![]() .
.
4) Для произвольной внутренней точки
окна
![]() вычисляется значение
вычисляется значение
![]() ,
а также для точки
,
а также для точки
![]() вычисляется
вычисляется
![]() .
Если числа
и
.
Если числа
и
![]() имеют одинаковый знак, то точка
является видимой.
имеют одинаковый знак, то точка
является видимой.
Наиболее просто эти алгоритмы реализуются в случае отсечения прямоугольным окном со сторонами параллельными осям координат.