Раздел 2. Основы автоматики и регулирования. Устройство, принцип действия систем дау главными двигателями.
Двигатели 8НФД36АУ поставляются оборудованными системами ДАУ, состоящими из пневматической части и электрической дистанционной связи местного поста с дистанционным постом в ходовой рубке. Местный пост на двигателе оборудован автоматической пневматической системой управления. Управление двигателем с местного поста производится с помощью маховичка. Команды о ходе судна передаются из ходовой рубки в машинное отделение с помощью машинного телеграфа.
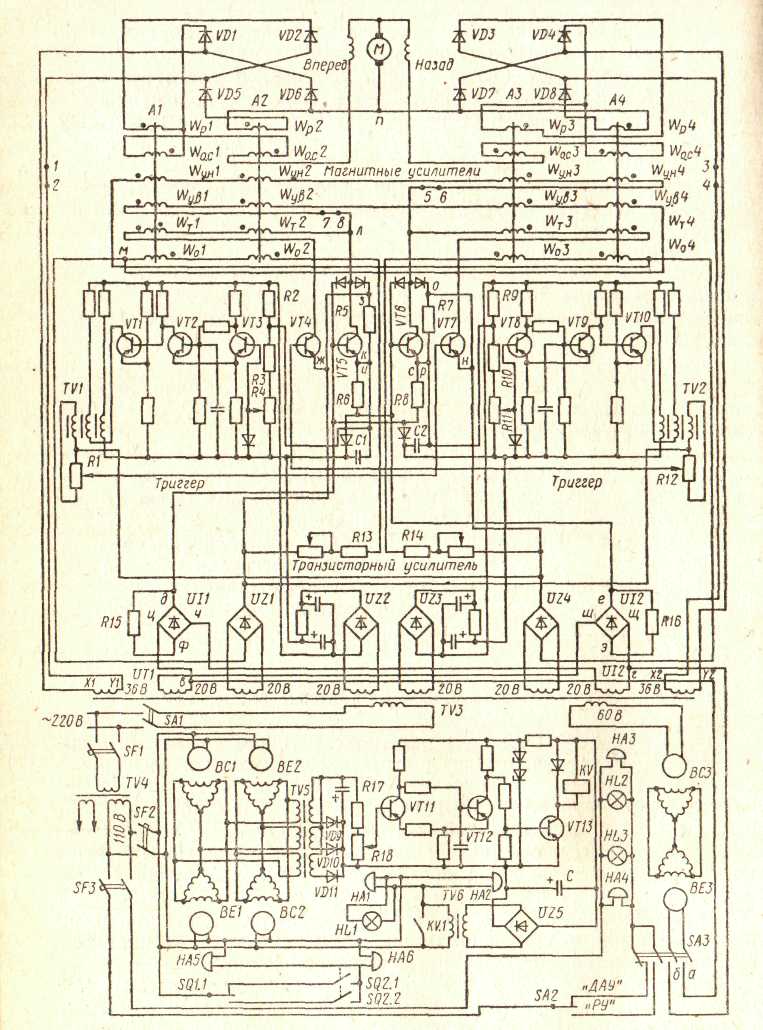
В систему дистанционного управления входят дистанционный пост в ходовой рубке, исполнительный механизм в машинном отделении и устройства управления и сигнализации.
Исполнительный механизм состоит из электродвигателя М постоянного тока с двумя последовательными обмотками возбуждения (для правого и левого вращений электродвигателя), редуктора, сельсина-приемника ВЕЗ и переключателя SA3. Исполнительный механизм ДАУ вводится в зацепление с двигателем с помощью специальной рукоятки.
Задающим элементом дистанционного поста управления является сельсин-датчик BC3t ротор которого механически связан с рукояткой машинного телеграфа.
Устройства.управления и сигнализации состоят из фазочувст-вительных дискриминаторов, транзитных и магнитных усилителей и триггеров. Фазочувствительные дискриминаторы представляют собой фазочувствительные выпрямители. Каждый дискриминатор включает в себя вторичные обмотки VII, UI2, трансформатор TV3, выпрямители UT1, UT2 и резисторы R15, R16.
Транзисторные усилители VT5, VT6 служат первой ступенью усиления командного сигнала, создаваемого сельсином-приемником ВЕЗ. Применение транзитных усилителей обеспечивает ввод в работу магнитных усилителей при рассогласовании сельсинов на 1°. Транзисторные усилители VT4, VT7 обеспечивают торможение электродвигателя М противотоком.
Триггеры состоят из транзисторов VT1—VT3 и VT8—VT10. Они создают прямоугольные импульсы для управления транзисторами VT4, VT7.
Магнитные усилители мощности А1—А4 служат для питания электродвигателя и в зависимости от направления его вращения включаются попарно. Каждый магнитный усилитель имеет по 6 обмоток: №р — рабочая, Wo.c — обратной положительной связи, Wy.B — управления для работы «Вперед», №у.„ — управления для работы «Назад», WT — торможения и Wo — снятия магнитного поля.
Управление двигателем с местного поста.
Включаются автоматические выключатели SF1—SF3, переключатель SA2 в ходовой рубке ставится в положение «Ручное управление». Если исполнительный механизм ДАУ не отключен от двигателя, то получат питание звонки НАЗ, НА4 и сигнальные лампы HL2, HL3. Сигналы будут подаваться до тех пор, пока не будет выведен исполнительный механизм ДАУ из зацепления с двигателем. При отключении исполнительного механизма контактом переключателя SA3 отключается питание на цепь сигнализации. Получат питание обмотки возбуждения сельсинов ВС1, ВС2, ВЕ1, ВЕ2 машинного телеграфа. Команды о ходе судна передаются из. ходовой рубки в машинное отделение машинным телеграфом.
Машинный телеграф состоит из: сельсина-датчика ВС1; сельсина-приемника ВЕ2 в ходовой рубке; сельсина-приемника ВЕ1; сельсина-датчика ВЕ2 в машинном отделении; устройства контроля скорости исполнения команд и контроля исполнения реверса. Рукоятку машинного телеграфа ставят в положение, соответствующее ходу судна, например «Полный вперед», при этом ротор сельсина-датчика ВС1 повернется на заданный угол. Равновесие э. д. с. в обмотках синхронизации сельсинов нарушается. Под действием разности з. д. с. в цепи этих обмоток появится ток. В результате взаимодействия магнитных потоков на ротор сельсина-приемника ВЕ1 будет действовать вращающий момент, под действием которого ротор начнет поворачивать стрелку телеграфа на заданный угол. Одновременно между сельсинами-датчиками ВС1 и ВС2 через первичные обмотки трансформатора TV5 пройдет ток. Со вторичных обмоток этого трансформатора через выпрямители VD9—VD11 ток замкнется на делитель напряжения R17, R18, с которого управляющее напряжение снимается на базу транзистора VT11. Поочередно транзисторы VT11 и VT13 откроются, катушка реле KV получит питание. Контакты KV.1 замкнутся и включат звонки НА1, НА2 и сигнальную лампу НЫ. Сигнал будет подаваться до тех пор, пока не будет выполнена команда. Сигнализация включается при рассогласовании роторов сельсинов-датчиков на угол 3°. Контроль реверса двигателя выполняется специальным устройством, которое состоит из переключающего контакта SQ1.1, установленного в указателе машинного телеграфа, и контактов SQ2.1, SQ2.2 путевых выключателей реверса, установленных на двигателе. Если реверс выполнен неправильно, то контакты путевых выключателей реверса включат звонки НА5, НА6. Сигналы будут подаваться до тех пор, пока не будет правильно выполнен реверс двигателя.
Дистанционное управление.
Для перехода на дистанционное управление переключатель SA2 ставят в положение «ДАУ». При этом включаются звонки НАЗ, НА4 и сигнальные лампы HL2, HL3. Рукоятку машинного телеграфа и маховичок поста управления ставят в положение «Стоп». С помощью специальной рукоятки вводят исполнительный механизм ДАУ в зацепление с двигателем. В этом случае контакты SA3 переключателя отключают сигнализацию. Сельсин-датчик ВСЗ и сельсин-приемник ВЕЗ согласованы, и ток рассогласования отсутствует. На выходе фазочувствительных дискриминаторов UI1, UI2, в узлах д и е потенциалы будут одинаковы. Фаза напряжения рассогласования на обмотке ротора сельсина-приемника ВЕЗ меняется на 180° в зависимости от направления поворота ротора сельсина-датчика. Вследствие этого на выходе, в узлах дне будет меняться полярность и величина сигнала.
При повороте рукоятки машинного телеграфа в положение «Вперед» ротор сельсина-датчика ВСЗ повернется в заданную сторону. В обмотке ротора сельсина-приемника ВЕЗ возникнет э. д. с, которая по фазе будет совпадать с э. д. с. в одной из обмоток фазочувствительного дискриминатора, а в другой будет направлена встречно.
Пусть сельсины настроены так, что при повороте рукоятки управления в сторону «Вперед» на зажиме а сельсина-приемника ВЕЗ будет «плюс» сигнала, а в обмотках трансформатора фазочувствительных дискриминаторов Ш1, UI2 направление э. д. с. в данный момент будет справа налево (см. по схеме). Тогда в первый полупериод токи от обмотки ротора сельсина-приемника ВЕЗ будут проходить по следующим двум цепям:
первая цепь — зажим а сельсина, узел в, обмотка трансформатора UT1 (э. д. с. в этой обмотке совпадают по направлению),
узлы ш, е резистор R16, узлы э, щ фазочувствительного выпрямителя UI2, узел г и второй зажим б сельсина;
вторая цепь — зажим а сельсина, узел в, узлы ц, д, резистор R15, узлы ф, ч фазочувствительного выпрямителя UI1, обмотка трансформатора UI2 (э. д. с. в этой обмотке направлены встречно), узел г и второй зажим б сельсина.
В результате взаимодействия э. д. с. обмотки сельсина-приемника ВЕЗ и обмоток трансформатора VII и UI2 на выходе фазочувствительного выпрямителя, в узлах д и е появится разность потенциалов, которая прикладывается к транзисторам VT5 и VT6. Причем в узле е потенциал будет выше, чем в узле д. В результате на базу транзистора VT5 будет подан отрицательный потенциал, который изменит напряжение перехода база—эмиттер, в результате понижается потенциальный барьер в эмиттерном переходе, что способствует увеличению тока коллектора и тока в обмотках управления №у.в магнитных усилителей. Ток управления замкнется по следующей цепи: плюс выпрямителя UZ1, узлы ж, з, и, к, эмиттер—коллектор VT5, узел л, обмотка управления №у.в—Wy.b4 магнитных усилителей А1—А4, узел м, минус выпрямителя UI1. В обмотках управления Wy.Bl, Wy.s2 и в рабочих обмотках Wpl, WP2 токи совпадают по направлению, их магнитные потоки складываются и сердечники магнитных усилителей А1 и А2 намагничиваются до состояния насыщения. Индуктивное сопротивление рабочих обмоток уменьшается до нуля, а сила тока в цепи электродвигателя Ml возрастает до номинального значения. Токи в обмотках управления Wy.z3, Wy.B4 и в рабочих обмотках WP3, WP4 магнитных усилителей A3 и А4 не совпадают по направлению, поэтому в рабочих обмотках резко увеличивается индуктивное сопротивление и ток через них к электродвигателю не поступает.
В первый полупериод цепь рабочего тока электродвигателя будет следующей: зажим XI обмотки трансформатора TV3, диод VD1 обмотки обратной положительной связи W0.J, WO.C2, обмотка возбуждения электродвигателя для работы «Вперед», обмотка якоря, узел п, рабочая обмотка WP2, диод VD5, зажим YI обмотки трансформатора на 36 В. Во второй полупериод цепь рабочего тока будет следующей: зажим YI обмотки трансформатора на 36 В, диод VD2, рабочая обмотка Wp, обмотки положительной обратной связи W0.d, WO.Z2, обмотка возбуждения электродвигателя для работы «Вперед», обмотка якоря, узел п, диод VD6 и зажим XI обмотки трансформатора UZ1. В оба полупериода в электродвигатель поступает постоянный ток, и он будет поворачивать вал исполнительного механизма для работы двигателя «Вперед». Одновременно в том же направлении будет поворачиваться сельсин-приемник ВЕЗ. При этом командный сигнал будет уменьшаться.
При достижении согласованного положения роторов сельсинов датчика и приемника заряжаются конденсаторы С1 и С2 от выпрямителей UZ2, UZ3, от которых также питаются триггеры.
Рассмотрим работу триггера, собранного на транзисторах VT1—VT3. При наличии командного сигнала на транзисторе VT5 в цепи эмиттер—коллектор проходит ток, вследствие этого потенциал узла и понизится и конденсатор С1 разрядится на делитель напряжения R2—R4. Это вызовет изменение напряжения на выходе транзистора VT3, и триггер перейдет в первое устойчивое состояние, когда на его выходе напряжение будет отсутствовать. В таком состоянии триггер будет находиться до тех пор, пока будет действовать командный сигнал. При исполнении команды действие командного сигнала прекращается. Транзистор VT5 закрывается, конденсатор С1 заряжается и переводит триггер во второе устойчивое состояние. На его выходе сформируется тормозной прямоугольный импульс напряжения. Это напряжение с резистора R1 подается на базу транзистора VT7, который открывается, и обмотки торможения WT4, Wr3 магнитных усилителей получают питание по следующей цепи: плюс-выпрямителя UZ4, узел н, эмиттер—коллектор транзистора VT7, обмотки торможения Wr4, WT3, обмотки управления Wy.n4— Wy.nl для работы «Назад», узел г и минус выпрямителя UZ4. Направление тока в обмотках WT4, WT3, Wy.H4, Wy.H3 совпадает с направлением тока в рабочих обмотках WP4, WP3, а в обмотках Wy.H2, Wy.ul и WP1, WP2 не совпадает, поэтому включаются в работу магнитные усилители A3, А4. Получит питание якорь электродвигателя через последовательную обмотку возбуждения для работы «Назад», и электродвигатель быстро остановится.
Работа схемы при команде «Назад» аналогична описанной выше.