

Методы синтеза систем автоматической стабилизацииции и позиционирования
.pdfристикам: |
|
|
|
|
|
|
|
ками: |
|
|
|
|
|
|
|
|
|
1) по задающему воздействию: |
|
1) за задавальним діянням: стала |
|||||||||||||||
установившаяся |
ошибка |
|
δуст = 1, 2 % ; |
похибка |
δст = 1, 2 % ; |
час |
перехідного |
||||||||||
время |
переходного |
|
|
процесса |
процесу |
tпп = 0,11 c ; |
перерегулювання |
||||||||||
tпп = 0,11 c ; |
|
|
перерегулирование |
σ = 4,9 % ; |
|
|
|
|
|
|
|||||||
σ = 4,9 % ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) по возмущающему воздействию: |
|
1) за збурним діянням: стала |
|||||||||||||||
установившаяся |
ошибка |
|
δуст = 4,8 % ; |
похибка |
δст = 4,8 % ; |
час |
перехідного |
||||||||||
время |
переходного |
|
|
процесса |
процесу |
tпп = 1,18 c ; |
перерегулювання |
||||||||||
tпп = 1,18 c ; |
|
|
перерегулирование |
σ = 19,3 % . |
|
|
|
|
|
|
|||||||
σ = 19,3 % . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Упрощение |
структуры |
КЭ |
не |
|
Спрощення |
структури |
КЕ |
не |
|||||||||
ухудшило показатели качества системы. |
погіршило показники якості системи. |
||||||||||||||||
Разработка схемы набора переда- |
|
Розроблення |
|
|
схеми |
набору |
|||||||||||
точной функции КЭ на лабораторном |
передавальної |
функції |
|
КЕ |
на |
||||||||||||
стенде. |
|
|
|
|
|
|
|
лабораторному стенді. |
|
|
|
||||||
Представим |
выражение |
(2.65) |
в |
|
Подамо вираз (2.65) у вигляді |
||||||||||||
виде произведения множителей, предва- |
добутку |
множників, |
попередньо |
||||||||||||||
рительно поставив в |
соответствие |
поставивши у відповідність позначення |
|||||||||||||||
обозначения |
входного |
и |
выходного |
вхідного і вихідного сигналів у |
|||||||||||||
сигналов в передаточной функции и на |
передатній функції і на електричній |
||||||||||||||||
электрической схеме: |
|
|
|
|
схемі: |
|
|
|
Uвих (s) |
|
|
|
|||||
W (s) = |
Uвых (s) |
= |
|
|
|
|
W (s) = |
= |
|
|
|||||||
|
|
|
|
|
Uвх (s) |
|
|
||||||||||
|
к |
|
Uвх (s) |
|
|
|
|
к |
|
|
|
|
|||||
|
|
|
|
|
|
кк2 (Tк2s + 1) |
|
|
|
|
|
||||||
|
|
|
= Wк1 (s) Wк2 (s) = кк1 |
, |
|
|
|
(2.83) |
|||||||||
|
|
|
Tк1s + 1 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где кк = кк1кк2 . |
|
|
|
|
|
|
де кк = кк1кк2 . |
|
|
|
|
|
|
||||
Применим |
|
метод |
|
|
блочного |
|
Застосуємо метод блочного інтег- |
||||||||||
интегрирования. |
Тогда |
передаточную |
рування. Тоді передавальну функцію |
||||||||||||||
функцию Wк1 (s) можно представить в |
Wк1 (s) |
можна подати у вигляді схеми |
|||||||||||||||
виде схемы |
усилительного звена |
підсилювальної ланки (рис. 2.18). |
|
||||||||||||||
(рис. 2.18). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.18. Схема набора |
Рис. 2.18. Схема набору |
усилительного звена |
підсилювальної ланки |
69

Передаточную функцию Wк2 (s) |
Передавальну функцію Wк2 (s) |
можно представить в виде схемы |
можна подати у вигляді схеми |
инерционного форсирующего звена |
інерційної форсуючої ланки (рис. 2.19). |
(рис. 2.19). |
|
Рис. 2.19. Схема набора инерционного |
Рис. 2.19. Схема набору інерційної |
форсирующего звена |
форсуючої ланки |
Взаимосвязь параметров передаточной функции КЭ с номиналами сопротивлений и емкостей определяется такими соотношениями:
Взаємозв'язок параметрів передавальної функції КЕ з номіналами опорів і ємностей визначається такими співвідношеннями:
|
|
|
к |
к1 |
= |
|
R0 |
; к |
к2 |
= |
R01 |
; T |
|
= R |
C |
; T |
= R C ; к |
к |
= к |
к |
к2 |
. |
(2.84) |
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
R |
|
|
R1 |
|
|
|
к1 |
|
|
|
01 0 |
|
к2 |
|
1 |
|
|
|
к1 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Определим |
|
|
|
|
|
номиналы |
|
|
|
|
Визначимо |
|
номінали |
|
опорів і |
||||||||||||||||||||||||||
сопротивлений и емкостей. Для этого |
ємностей. Для цього обираємо ємності |
||||||||||||||||||||||||||||||||||||||||
выбираем |
|
|
емкости |
|
|
|
конденсаторов |
конденсаторів |
C = C0 = 1 |
мкФ. Тоді, |
|||||||||||||||||||||||||||||||
C = C0 = 1 мкФ. Тогда, учитывая (2.84), |
ураховуючи (2.84), |
опори |
резисторів |
||||||||||||||||||||||||||||||||||||||
сопротивления резисторов R01 и R1 |
R01 |
і |
|
R1 |
|
будуть |
|
відповідно |
|||||||||||||||||||||||||||||||||
будут соответственно равны: |
|
|
|
|
|
|
|
|
|
дорівнювати: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
R |
01 |
= |
Tк1 |
|
= |
4 |
= 4 МОм; R |
1 |
= |
Tк2 |
= |
|
0,8 |
= 0,8 МОм; к |
к2 |
= |
R01 |
= |
|
4 |
= 5 . |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
C0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
1 |
|
|
|
|
|
|
|
|
R1 |
0,8 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Найдем |
|
коэффициент |
передачи |
|
|
|
|
Знайдемо |
коефіцієнт |
передачі |
|||||||||||||||||||||||||||||||
усилительного звена |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
підсилювальної ланки |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
к2 |
= |
кк |
= |
35 |
= 7 . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кк1 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Для |
реализации |
такого |
|
значения |
|
|
|
|
Для |
|
реалізації |
такого |
значення |
||||||||||||||||||||||||||||
целесообразно |
|
выбрать |
сопротивление |
доцільно |
|
вибрати |
|
опір |
постійного |
||||||||||||||||||||||||||||||||
постоянного резистора R0 = 0,7 МОм, а |
резистора |
R0 = 0,7 |
МОм, |
а |
змінного |
||||||||||||||||||||||||||||||||||||
переменного R = 0,1 МОм. |
|
|
|
|
|
|
|
|
|
R = 0,1 МОм. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Величины сопротивлений R01, R1 |
|
|
|
|
Величини опорів R01, R1 і R0 |
||||||||||||||||||||||||||||||||||||
и R0 |
|
могут быть реализованы |
можуть бути реалізовані послідовним |
||||||||||||||||||||||||||||||||||||||
последовательным |
|
|
|
соединением |
з'єднанням резисторів: |
|
|
|
|
||||||||||||||||||||||||||||||||
70
резисторов:
1)для сопротивления R01 –
четырех резисторов 1 МОм; |
|
|
||
2) для сопротивления R1 |
– |
ре- |
||
зисторов |
с |
номиналами |
|
0,5, |
0,2, 0,1 МОм; |
|
|
|
|
3) для сопротивления R0 |
– |
ре- |
||
зисторов с |
|
номиналами |
0,5 |
и |
0,2 МОм. |
|
|
|
|
Метод |
логарифмических |
ампли- |
||
тудно-частотных характеристик отличается наглядностью, но требует выполнения двух или более итераций. Это связано с тем, что коррекция динамических свойств системы осуществляется только по реакции на задающее воздействие.
1) для опору R01 – чотирьох резисторів 1 МОм;
2)для опору R1 – резисторів з но-
міналами 0,5, 0,2, 0,1 МОм;
3)для опору R0 – резисторів з номіналами 0,5 і 0,2 МОм.
Метод логарифмічних амплітудночастотних характеристик відрізняється наочністю, але вимагає виконання двох або більше ітерацій. Це пов'язано з тим, що корекція динамічних властивостей системи здійснюється тільки по реакції на задавальне діяння.
71
Глава 3 МЕТОД КОРНЕВОГО ГОДОГРАФА
Розділ 3 МЕТОД КОРЕНЕВОГО ГОДОГРАФА
Если учиться и не мыслить, то не |
Якщо вчитися і не думати, то не |
будет никаких результатов; если |
буде ніяких результатів; якщо мислити |
мыслить и не учиться, то результатов |
і не вчитися, то результатів теж не |
тоже не будет, так как в конечном |
буде, так як в кінцевому підсумку |
итоге зайдёшь в тупик. |
зайдеш у глухий кут. |
Китайская мудрость |
Китайська мудрість |
В основе метода корневого годографа лежат положения устойчивости систем автоматического управления. Анализ расположения корней характеристического уравнения дает возможность оценить не только степень устойчивости, а и показатели качеста работы системы, следовательно, возможна и обратная задача синтеза.
Корневым годографом называется геометрическое место корней характеристического уравнения замкнутой системы при изменении варьируемого параметра от 0 до ∞. Для построения корневого годографа необходимо вывести аналитические зависимости корней характеристического уравнения от варьируемого (искомого) параметра регулятора, по которым в числовой области строятся кривые – ветви траектории каждого из корней.
Исходя из требуемых значений времени переходного процесса и перерегулирования, в системе формируются области желаемых характеристик. Накладывая эти ограничения на график корневого годографа, можно выделить область корней, обеспечивающих заданное качество управления, и рассчитать параметры корректирующего элемента. Варьируемым может выступать как параметр всей системы в
В основі методу кореневого годографа лежать положення стійкості систем автоматичного управління. Аналіз розташування коренів характеристичного рівняння дає можливість оцінити не тільки ступінь стійкості, а й показники якості роботи системи, отже можлива і зворотна задача синтезу.
Кореневим годографом називається геометричне місце коренів характеристичного рівняння замкненої системи при зміненні варійованого параметра від 0 до ∞. Для побудови кореневого годографа необхідно вивести аналітичні залежності коренів характеристичного рівняння від змінюваного (шуканого) параметра регулятора, за якими в числовий області будуються криві – гілки траєкторії кожного з коренів.
Виходячи з необхідних значень часу перехідного процесу і перерегулювання, в системі формуються області бажаних характеристик. Накладаючи ці обмеження на графік кореневого годографа, можна виділити область коренів, що забезпечують задану якість упраління, і розрахувати параметри коригувального елемента. Варійованим може виступати як параметр усієї системи в цілому, так і будь-якого її елемента.
72
целом, так и любого ее элемента.
3.1. История развития метода |
3.1. Історія розвитку методу |
|
||
корневого годографа |
кореневого годографа |
|
||
Метод корневого годографа был |
Метод |
кореневого |
годографа |
був |
предложен практически в одно и то же |
запропонований практично в один і той |
|||
время в СССР и США: в России |
же час у |
СРСР і |
США: у |
Росії |
К. Ф. Теодорчиком, А. Г. Бендриковым, К. Ф. Теодорчиком, А. Г. Бендріковим,
С. П. Стрелковым в 1948–1949 |
гг., в |
С. П. |
Стрелковим у 1948–1949 рр., у |
|||||||||||||
США – У. Р. Эвансом в 1950 г. |
|
США – |
У. Р. Евансом у 1950 р. |
|
|
|||||||||||
|
К. Ф. Теодорчик большую часть |
К. Ф. Теодорчик більшу частину |
||||||||||||||
своей жизни посвятил изучению и раз- |
свого життя присвятив вивченню і |
|||||||||||||||
витию теории колебательных процессов |
розвитку теорії коливальних процесів у |
|||||||||||||||
в нелинейных системах. Наряду с клас- |
нелінійних |
|
системах. |
Поряд |
з |
|||||||||||
сическим энергетическим методом ана- |
класичним |
енергетичним |
методом |
|||||||||||||
лиза таких задач он начинает использо- |
аналізу таких задач він починає |
|||||||||||||||
вать метод «обобщенных диаграмм ре- |
використовувати метод |
«узагальнених |
||||||||||||||
генерации», являющийся модификаци- |
діаграм |
регенерації», |
який |
є |
||||||||||||
ей и дальнейшим развитием метода |
модифікацією і подальшим розвитком |
|||||||||||||||
Найквиста (графоаналитический метод |
методу |
Найквіста |
(графоаналітичний |
|||||||||||||
исследования |
устойчивости |
линейных |
метод |
дослідження |
стійкості |
лінійних |
||||||||||
систем с обратной связью). В 1948 г. в |
систем зі зворотним зв'язком). У 1948 р. |
|||||||||||||||
Журнале |
технической |
|
физики |
были |
у Журналі технічної фізики були |
|||||||||||
опубликованы |
первые |
результаты. |
опубліковані перші результати. Стаття |
|||||||||||||
Статья К. Ф. Теодорчика «Траектории |
К. Ф. Теодорчика «Траєкторії коренів |
|||||||||||||||
корней характеристического уравнения |
характеристичного |
рівняння |
системи |
|||||||||||||
системы |
третьего |
порядка |
при |
третього |
порядку |
при безперервному |
||||||||||
непрерывном |
изменении |
свободного |
змінюванні |
|
вільного |
члена |
і |
|||||||||
члена и максимально достижимая при |
максимально |
|
досяжна |
при |
цьому |
|||||||||||
этом устойчивость» стала основой для |
стійкість» |
стала |
основою |
для |
||||||||||||
формирования нового метода в теории |
формування нового методу в теорії |
|||||||||||||||
автоматического управления – |
метода |
автоматичного |
управління – |
методу |
||||||||||||
корневого годографа [1]. |
|
|
|
кореневого годографа [1]. |
|
|
||||||||||
|
В |
1949 |
г. к |
|
исследованиям |
У |
|
1949 |
р. |
до |
досліджень |
|||||
К. |
Ф. |
Теодорчика |
присоединяется |
К. Ф. Теодорчика |
приєднується |
|||||||||||
Г. А. Бендриков. Вместе они |
Г. А. Бендріков. Разом вони прагнули |
|||||||||||||||
стремились найти метод, позволяющий |
знайти метод, що дозволяє за |
|||||||||||||||
по коэффициентам уравнения судить, |
коефіцієнтами рівняння судити, хоча б |
|||||||||||||||
хотя |
бы качественно, |
о |
характере |
якісно, |
про |
|
характер |
розташування |
||||||||
расположения корней |
характеристи- |
коренів |
характеристичного |
рівняння |
||||
ческого |
уравнения |
системы |
на |
системи |
на |
площині комплексної |
||
плоскости комплексного переменного s. |
змінної |
s. |
Загальновідомі |
ознаки |
||||
Общеизвестные признаки устойчивости |
стійкості |
дають |
лише |
критерій |
||||
73
дают лишь критерий нахождения всех корней в левой полуплоскости, не конкретизируя совершенно их расположения. В своих работах авторы показывают, что рассмотрение законов перемещения корней при изменении коэффициентов уравнения позволяет для уравнений третьей и четвертой степеней по значениям коэффициентов указать тип расположения и характер смещения корней, вызываемый изменением свободного коэффициента характеристического уравнения [2].
Параллельно свои исследования в США начинает Уолтер Эванс, известный американский ученый в области систем автоматического управления. Результатом его работ становится пояление в 1950 г. авторского метода построения корневого годографа с использованием специального транспор-
тира «Spirule» [3].
В70-х годах работу по развитию корневого годографа и его применению для синтеза систем атоматического управления проводит Э. Г. Удерман. Ему удалось систематизировать все известные знания о корневых годографах
иразвить их [4].
Врезультате исследований ученые получили, что относительная устойчивость и качество переходного режима замкнутой системы управления непосредственно связаны с расположением корней характеристического уравнения на числовой s-плоскости.
Метод синтеза систем автоматического управления является графическим, а сам годограф позволяет получить качественную информацию об устойчивости и динамических показателях по передаточной функции. Если положение корней по какой-либо причине не устраивает проектировщика, по
знаходження усіх коренів у лівій півплощині, що абсолютно не конкретизує їх розміщення. У своїх роботах автори показують, що розгляд законів переміщення коренів при зміні коефіцієнтів рівняння дозволяє для рівнянь третього і четвертого степенів за значеннями коефіцієнтів указати тип розташування і характер зміщення коренів, що викликається зміною вільного коефіцієнта характеристичного рівняння [2].
Паралельно свої дослідження в США починає Уолтер Еванс, відомий американський вчений в області систем автоматичного управління. Результатом його робіт стає винахід у 1950 р. авторського методу побудови кореневого годографа з використанням спеціального транспортира «Spirule» [3].
У70-х роках роботу з розвитку кореневого годографа та його застосування для синтезу систем автоматичногоя управління проводить Е. Г. Удерман. Йому вдалося систематизувати всі відомі знання про кореневі годографи та розвинути їх [4].
Урезультаті досліджень учені отримали, що відносна стійкість і якість перехідного режиму замкненої системи управління безпосередньо пов'язані з розташуванням коренів характеристичного рівняння на числовій s- площині.
Метод синтезу систем автоматичного управління є графічним, а сам годограф дозволяє отримати якісну інформацію про стійкість і динамічні показники за передавальною функцією. Якщо положення коренів з будь-якої причини не влаштовує проектувальника, за кореневим годографом він
74
корневому годографу он может с легкостью определить требуемое положение корней и рассчитать корректирующее звено.
Результатом научных исследований указанных выше ученых есть опиисание различных методов построения корневого годографа системы по характеристическому уравнению и сформированные свойства корневых годографов. Среди всех свойств основными являются:
1)корневой годограф имеет n ветвей, где n – порядок характеристического уравнения системы;
2)ветви корневого годографа симметричны относительно вещественной оси (рис. 3.1);
Рис. 3.1. Ветви корневого годографа
3)ветви корневого годографа при
к= 0 начинаются из полюсов разомкнутой системы;
4)при к = ∞ m ветвей корневого годографа заканчиваются в нулях Разомкнутой системы;
5)остальные n − m ветвей корневого годографа при к = ∞ уходят в бесконечность вдоль асимптот;
6)центр асимптот находится на вещественной оси в силу симметричности ветвей;
7)углы, под которыми расходятся асимптоты, вычисляют по формуле
може з легкістю визначити необхідне положення коренів і розрахувати коригувальну ланку.
Результатом наукових досліджень вказаних вище вчених є опис різних методів побудови кореневого годографа системи за характеристичним рівнянням і сформовані властивості кореневих годографов. Серед усіх властивостей основними є:
1)кореневий годограф має n гілок, де n – порядок характеристичного рывняння системи;
2)гілки кореневого годографа
симетричні відносно дійсної осі
(рис. 3.1);
Рис. 3.1. Гілки кореневого годографа
3) гілки кореневого годографа при к = 0 починаються з полюсів розімкненої системи;
4)при к = ∞ m гілок кореневого годографа закінчуються у нулях розімкненої системи;
5)решта n − m гілок кореневого
годографа при к = ∞ йдуть у нескінченність уздовж асимптот;
6)центр асимптот знаходиться на дійсній осі в силу симетричності гілок;
7)кути, під якими розходяться асимптоти, обчислюють за формулою
75

|
|
Θi = |
π |
+ 1), i = 0,1,... |
|
|
|
|
|
(2i |
(3.1) |
||
|
|
|
||||
8) любая |
|
|
n − m |
8) будь-яка точка |
дійсної осі, |
|
точка |
вещественной |
|||||
оси, справа от которой находится не- |
праворуч від якої знаходиться непарна |
|||||
чётное количество нулей и полюсов ра- |
кількість нулів і полюсів розімкненої |
|||||
зомкнутой |
системы, |
принадлежит |
системи, належить кореневому годо- |
|||
корневому годографу; |
|
|
|
графу; |
|
|
9) при некотором значении пара- |
9) при деякому значенні параметра |
|||||
метра к полюсы могут совпадать. Воз- |
к полюси можуть збігатися. Виникає |
|||||
никает кратная точка; |
|
|
|
кратна точка; |
|
|
10) при увеличении к полюсы |
10) при збільшенні к полюси |
|||||
расходятся из кратной точки под угла- |
розходяться від кратної точки під |
|||||
ми, вычисляемыми по формуле |
|
|
кутами, що обчислюються за формулою |
|||
|
|
Qi |
= π (2i + 1), i = 0,1,... ; |
(3.2) |
||
|
|
|
2 |
|
|
|
11) углы выхода полюсов Ql из |
11) кути виходу полюсів Ql з |
|||||
комплексных начальных точек s j или |
комплексних початкових точок s j або |
|||||
углы входа ветвей Qr в комплексные |
кути входу гілок Qr у комплексні |
|||||
конечные точки si находятся из выра- |
кінцеві точки si знаходяться з виразів |
|||||
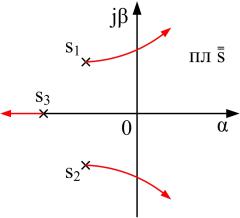
жений (рис. 3.2) |
|
|
|
(рис. 3.2) |
|
|
m |
n |
n |
m |
|
Ql = ∑Q0i |
− ∑Q j − π(2i + 1) ; Qr = ∑Q j − ∑Q0i − π(2i + 1) ; |
(3.3) |
||
i =1 |
j=1 |
j=1 |
i =1 |
|
|
j¹i |
|
i ¹r |
|
Рис. 3.2. Свойства корневого |
Рис. 3.2. Властивості кореневого |
годографа |
годографа |
12) точки пересечения ветвей корневого годографа с мнимой осью плоскости s находят по одному из критериев устойчивости [4].
12) точки перетину гілок кореневого годографа з уявною віссю площині s знаходять за одним з критеріїв стійкості [4].
76

3.2. Технология синтеза САУ |
3.2. Технологія синтезу САУ |
методом корневого годографа |
методом кореневого годографа |
Для обеспечения устойчивости САУ и требуемых показателей качества в системы вводят корректирующие устройства (correctus – лат., исправленный).
По месту включения корректирующие устройства бывают таких видов (рис. 3.3):
1)последовательные (КУ1);
2)параллельные (правильнее их называть встречно-параллельными,
КУ2);
3)прямые параллельные (КУ3).
Рис. 3.3. Расположение коректирующих устройств
Для забезпечення стійкості САУ і необхідних показників якості у системи вводять коригувальні пристрої (сorrectus – лат., виправлений).
За місцем включення коригувальні пристрої бувають таких видів (рис. 3.3):
1)послідовні (КП1);
2)паралельні (правильніше їх називати зустрічно-паралельними,
КП2);
3)прямі паралельні (КП3).
Рис. 3.3. Розташування коригувальних пристроїв
|
На рис. |
3.3 |
дано: |
ЗУ – задающее |
На рис. 3.3 дано: ЗП – |
задавальний |
||||||||||
устройство; |
ПУ |
|
– |
промежуточный |
пристрій; ПрП |
– проміжний |
підси- |
|||||||||
усилитель; |
КУ1 |
– |
последовательное |
лювач; КП1 – |
|
послідовний |
коригу- |
|||||||||
корректирующее устройство; КУ2 – |
вальний пристрій; КП2 – |
паралельний |
||||||||||||||
параллельное |
|
корректирующее |
коригувальний пристрій; КП3 – |
|||||||||||||
устройство; |
КУ3 |
– |
встречно- |
зустрічно-паралельний |
коригувальний |
|||||||||||
параллельное |
|
корректирующее |
пристрій; ПП – |
підсилювач потужності; |
||||||||||||
устройство; УМ – |
усилитель мощности; |
ВО – |
виконавчий орган; |
ОУ – |
об’єкт |
|||||||||||
ИО |
– |
исполнительный |
орган; |
ОУ |
– |
управління; Д – |
датчик; |
g ( t ) |
– зада- |
|||||||
объект управления; Д – |
датчик; |
g ( t ) |
– |
вальне діяння; |
uз ( t ) – задавальна на- |
|||||||||||
задающее |
воздействие; |
uз ( t ) |
– |
пруга; |
u ( t ) – |
відхилення; u ( t ) – си- |
||||||||||
задающее |
напряжение; |
u ( t ) |
– |
гнал управління; |
f ( t ) – |
збурне діяння; |
||||||||||
отклонение; u ( t ) |
– |
сигнал управления; |
x ( t ) – керована |
величина; uд ( t ) – |
||||||||||||
f ( t ) |
– |
возмущающее |
воздействие; |
сигнал вимірювання. |
|
|
|
|||||||||
77
x ( t ) – управляемая величина; uд ( t ) –
сигнал измерения.
Последовательное КУ1 включают после сравнивающего устройства или после предварительного усилителя.
Параллельные КУ2 охватывают отрицательной обратной связью УМ и (или) ИО.
Корректирующие устройства классифицируются по нескольким признакам:
1)по виду уравнений: а) линейные; б) нелинейные;
2)по наличию дополнительного источника энергии:
а) пассивные; б) активные;
3)по характеру процессов:
а) непрерывные; б) дискретные;
4) по роду тока:
а) постоянного тока; б) переменного тока.
Наибольшее распространение получили активные линейные последовательные и параллельные непрерывные корректирующие устройства.
Основой метода синтеза является анализ построенного корневого годографа. Для построения можно воспользоваться ручным методом или использовать компьютер, например, использовать программные средства среды
Matlab.
Послідовне КУ1 включають після порівнювального пристрою або після попереднього підсилювача.
Паралельні КП2 охоплюють негативним зворотним зв'язком ПП і (або) ВО.
Коригувальні пристрої класифікуються за кількома ознаками:
1)за видом рівнянь: а) лінійні; б) нелінійні;
2)за наявністю додаткового джерела енергії:
а) пасивні; б) активні;
3)за характером процесів:
а) безперервні; б) дискретні;
4) за родом струму:
а) постійного струму; б) змінного струму.
Найбільшого поширення набули активні лінійні послідовні та паралельні безперервні коригувальні пристрої.
Основою методу синтезу є аналіз побудованого кореневого годографа. Для побудови можна скористатися ручним методом або використувати комп'ютер, наприклад, використувати програмні засоби середовища Matlab.
3.2.1. Технология ручного построения |
3.2.1. Технологія ручної побудови |
корневого годографа |
кореневого годографа |
Рассмотрим алгоритм ручного построения корневого годографа. Укрупненная структурная схема системы автоматического управления изображена на рис. 3.4.
Розглянемо алгоритм ручної побудови кореневого годографа. Укрупнену структурну схему системи автоматичного управління зображено на рис. 3.4.
78