

Методы синтеза систем автоматической стабилизацииции и позиционирования
.pdfзомкнутой системы по задающему |
ної системи за задавальним діянням |
воздействию W (s) имеет вид |
W (s) має вигляд |
W (s) = Uд (s) Uз (s)
|
|
p |
|
|
|
|
|
к∏(Tks + 1) |
|
|
|
= |
|
k =1 |
, |
(4.6) |
|
n |
m |
||||
|
|
|
|||
|
sν ∏(Tis + 1)∏(Tj2s2 + 2ξ jTjs + 1) |
|
|
||
|
i=1 |
j=1 |
|
|
|
где к – |
коэффициент передачи; |
|
де к – |
коефіцієнт передачі; |
|||||
ν |
– |
количество |
интегрирующих |
ν |
– |
кількість інтегруючих ланок; |
|||
звеньев; |
|
|
|
|
|
Ti , Tj , Tk – сталі часу; |
|||
Ti , Tj , Tk – постоянные времени; |
ξ j – |
коефіцієнт затухання; |
|||||||
ξ j |
– |
коэффициент затухания; |
|
n – |
кількість інерційних ланок; |
||||
n – |
количество инерционных зве- |
m – |
кількість коливальних ланок; |
||||||
ньев; |
|
|
|
|
|
|
p |
– |
кількість форсуючих ланок. |
m |
|
– |
количество |
колебательных |
|
|
|
||
звеньев; |
|
|
|
|
|
|
|
|
|
p |
– |
количество форсирующих зве- |
|
|
|
||||
ньев. |
|
|
|
|
|
|
|
|
|
Коэффициент |
передачи |
к в |
Коефіцієнт передачі к у виразі |
||||||
выражении |
(4.6) |
представляет |
собой |
(4.6) являє собою добуток коефіцієнта |
|||||
произведение коэффициента передачи |
передачі початкового ОАУ і кори- |
исходного ОАУ и корректирующего |
гувального елемента кк послідовного |
элемента кк последовательного типа. |
типу. |
Величина кк определяется с |
Величина кк визначається з вико- |
использованием теоремы о конечном ристанням теореми про кінцеве зна-
значении оригинала для ошибки, |
чення оригіналу для похибки, спри- |
|||||||||
вызванной задающим и возмущающим |
чиненої задавальним і збурним діян- |
|||||||||
воздействиями: |
|
|
нями: |
|
|
|
|
|
||
|
uст |
= lim |
u (t ) = lim |
U (s)s = lim Ф u (s) Uз (s)s ≤ |
uдоп ; |
(4.7) |
||||
|
|
t →∞ |
s→0 |
|
s→0 |
|
|
|
(пр) |
|
|
uстf = lim |
uf (t ) = lim |
Uf (s)s = lim Фf |
u (s)F(s)s ≤ |
uдоп , |
(4.8) |
||||
|
|
t →∞ |
s→0 |
|
s→0 |
|
|
|
(пр) |
|
где uст , |
uстf |
– статическая ошибка; |
де uст , |
|
uстf |
– статична похибка; |
|
|||
uдоп |
– допустимое значение |
uпp |
– |
припустиме значення |
по- |
|||||
ошибки; |
|
|
|
|
хибки; |
|
|
|
|
|
Ф u (s) – |
передаточная функция |
Ф u (s) |
– |
передавальна функція |
||||||
системы для ошибки по воздействию; |
системи для похибки за задавальним |
|||||||||
|
|
|
|
|
діянням; |
|
|
|
|
|
129
|
Фf u (s) |
– передаточная функция |
|
|
|
Фf u (s) – |
передавальна функція сис- |
||||||||||||||
системы для ошибки по возмущаю- |
|
теми для похибки за збурним діянням; |
|||||||||||||||||||
щему воздействию; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Uз (s) |
– |
изображение входного за- |
|
|
|
Uз (s) |
– |
зображення вхідного зада- |
||||||||||||
дающего воздействия; |
|
|
|
|
|
|
|
|
|
вального діяння; |
|
|
|||||||||
|
F(s) – |
|
изображение входного воз- |
|
|
|
F(s) – |
зображення вхідного збурно- |
|||||||||||||
мущающего воздействия. |
|
|
|
|
|
|
|
|
го діяння. |
|
|
|
|
||||||||
|
Для |
|
|
систем |
автоматической |
|
|
|
Для систем автоматичної стабілі- |
||||||||||||
стабилизации (САС), в структуре кото- |
|
зації (САС), у структурі яких немає |
|||||||||||||||||||
рых |
нет |
интегрирующих элементов |
|
інтегруючих |
елементів |
( ν = 0 ), гра- |
|||||||||||||||
( ν = 0 ), |
предельное неравенство |
(4.7) |
|
нична нерівність (4.7) набуде вигляду |
|||||||||||||||||
примет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
uз |
|
≤ |
uдоп , |
|
|
|
|
(4.9) |
||||
|
|
|
|
|
|
1 + |
к тр |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
(пр) |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
(пт) |
|
|
|
|
|
|
|
|
|
|||
где |
uз |
– |
амплитуда ступенчатого за- |
|
де |
uз |
– |
амплітуда |
ступінчастого |
||||||||||||
дающего воздействия; |
|
|
|
|
|
|
|
|
|
задавального діяння; |
|
|
|||||||||
|
ктр |
– требуемое значение коэффи- |
|
|
|
кпт |
|
– |
потрібне значення |
коефі- |
|||||||||||
циента передачи разомкнутой САС. |
|
|
|
|
цієнта передачі розімкненої САС. |
|
|||||||||||||||
|
Аналогично для Фf u (s) : |
|
|
|
|
|
|
|
Аналогічно для Фf u (s) : |
|
|||||||||||
|
|
|
|
|
|
|
|
|
fкf |
|
≤ |
uдоп , |
|
|
|
|
(4.10) |
||||
|
|
|
|
|
|
|
1 + ктр |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
f |
– |
|
амплитуда |
ступенчатого |
|
де |
uз |
– |
амплітуда ступінчастого збу- |
|||||||||||
возмущающего воздействия; |
|
|
|
|
|
рного діяння; |
|
|
|||||||||||||
|
кf |
– |
коэффициент |
передачи |
ра- |
|
|
|
кf |
– |
коефіцієнт передачі |
розім- |
|||||||||
зомкнутой |
|
САС по |
возмущающему |
|
кненої САС за збурним діянням. |
|
|||||||||||||||
воздействию. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Для систем автоматического пози- |
|
|
|
Для систем автоматичного пози- |
||||||||||||||||
ционирования (САП) с одним или |
|
ціонування (САП) з одним або де- |
|||||||||||||||||||
несколькими интегрирующими звенья- |
|
кількома інтегруючими ланками ста- |
|||||||||||||||||||
ми статическая ошибка образуется при |
|
тична |
похибка утворюється |
при |
|||||||||||||||||
линейном задающем воздействии и не- |
|
лінійному задавальному діянні і не- |
|||||||||||||||||||
равенство (4.7) примет вид |
|
|
|
|
|
рівність (4.7) набуде вигляду |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
vз |
|
≤ |
|
uдоп , |
|
|
|
|
(4.11) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
к тр |
|
|
(пр) |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
(пт) |
|
|
|
|
|
|
|
|
|
|||
где vз – |
скорость нарастания линейно- |
|
де vз – |
швидкість наростання лінійного |
|||||||||||||||||
го задающего воздействия и при сту- |
|
задавального діяння і при сту- |
|||||||||||||||||||
пенчатом возмущающем воздействии: |
|
пінчастому збурному діянні |
|
||||||||||||||||||
130

|
|
fкf |
≤ |
uдоп . |
(4.12) |
|||
|
|
к тр |
|
|
(пр) |
|
||
|
|
(пт) |
|
|
|
|
|
|
Далее |
определяется |
желаемая |
|
|
Далі визначається бажана частота |
|||
частота среза разомкнутой системы, |
зрізу розімкненої системи, що побічно |
|||||||
косвенно |
определяющая |
быстро- |
визначає швидкодію замкненої САУ, |
|||||
действие замкнутой САУ, исходя из |
виходячи із заданих показників якості |
|||||||
заданных показателей качества систе- |
системи. |
|
||||||
мы. |
|
|
|
|
|
|
|
|
Заданными (требуемыми) пока- |
|
|
Заданими (потрібними) показни- |
|||||
зателями качества являются макси- |
ками якості є максимально припустимі |
|||||||
мально допустимые значения перерегу- |
значення перерегулювання σmax і часу |
|||||||
лирования σmax и времени пере- |
перехідного процесу tппmax . |
|
||||||
ходного процесса tппmax . |
|
|
|
|
|
|
|
|
Сначала, исходя из заданных σmax |
|
|
|
Спочатку, виходячи з |
заданих |
|||
и tппmax по номограмме |
(рис. 4.6) |
σmax і tппmax за номограмою (рис. 4.6) |
||||||
определяют |
коэффициент |
пропорцио- |
визначають коефіцієнт пропорційності |
|||||
нальности к между частотой среза ω |
|
к між частотою зрізу ωзp |
і часом |
|||||
|
|
|
cp |
|
|
|
|
|
и временем переходного процесса: |
|
|
перехідного процесу: |
|
||||
|
|
t |
max |
= |
kπ |
. |
(4.13) |
|
|
|
|
||||||
|
|
|
|
ωп |
|
|||
|
|
|
|
|
|
|
||
Рис. 4.6. Номограмма для определения |
Рис. 4.6. Номограма для визначення |
||||||||
частоты среза |
|
частоти зрізу |
|
|
|||||
Далее по выражению (4.13) опре- |
Далі за виразом (4.13) визначають |
||||||||
деляют желаемую частоту среза систе- |
бажану частоту зрізу системи: |
|
|||||||
мы: |
kπ |
|
|
kπ |
|
|
|||
ωcpж = |
. |
ωзpБ = |
. |
(4.14) |
|||||
|
|
|
|
||||||
tппmax |
tппmax |
||||||||
|
|
|
|
|
|||||
131

Полученное значение ωcpж дает |
Отримане значення ωзpБ дає змогу |
возможность перейти к решению зада- |
перейти до вирішення задачі вибору |
чи выбора параметров кп , ки , кд . |
параметрів кп , кi , кд . |
4.2.5. Выбор параметров |
4.2.5. Вибір параметрів |
корректирующего элемента с ПИД |
коригувального елемента з ПІД |
структурой |
структурою |
Аналитически затруднительно вы- |
Аналітично важко вирахувати |
числить точные значения параметров |
точні значення параметрів ПІД КЕ, що |
ПИД КЭ, обеспечивающие заданные |
забезпечують задані показники якості. |
показатели качества. Поэтому исполь- |
Тому використаємо ітераційний спосіб |
зуем итерационный способ определе- |
визначення кп , кi , кд , оснований на їх |
ния кп , ки , кд , основанный на их |
впливі на непрямі показники якості – |
влиянии на косвенные показатели каче- |
запаси стійкості замкненої САУ за |
ства – запасы устойчивости замкнутой |
амплітудою hз і за фазою ϕз . |
САУ по амплитуде hз и по фазе ϕз . |
|
Для этого запишем выражения для |
Для цього запишемо вирази для |
ЛАЧХ и ФЧХ разомкнутой системы по |
ЛАЧХ і ФЧХ розімкненої системи за |
задающему воздействию (рис. 4.7). |
задавальним діянням (рис. 4.7). |
Рис. 4.7. Структурная схема САУ с корректирующим єлементом: Wк (s) – передаточная функция
корректирующего элемента; Uк (s) – выходной сигнал КЭ
Представим уравнение ПИД КЭ (4.3) в форме передаточной функции
W(s) = Uк (s) = кдs2 + кпs + ки .
кU (s) s
Рис. 4.7. Структурна схема САУ з коригувальним елементом: Wк (s) – передавальна функція
коригувального елемента; Uк (s) – вихідний сигнал КЕ
Подамо рівняння ПІД КЕ (4.3) у формі передавальної функції
W(s) = Uк (s) = кдs2 + кпs + кi .
кU (s) s
|
|
|
|
|
(4.15) |
Тогда |
передаточная |
функция |
Тоді |
передавальна |
функція |
разомкнутой |
системы по |
задающему |
розімкненої |
системи за |
задавальним |
воздействию |
с учетом (4.6), (4.15) |
діянням з |
урахуванням |
(4.6), (4.15) |
|
132
примет вид |
|
|
|
|
|
|
|
|
|
набуде вигляду |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
W (s) = W (s) W (s) = |
Uд (s) |
= |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Uз (s) |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
к |
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
к |
д |
s2 |
+ к |
п |
s + к |
и |
× |
|
= |
|
к |
д |
s2 + к |
п |
s + к |
i |
× |
||
|
|
|
s |
|
|
|
|
|
|
|
|
|
s |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кн ∏(Tks + 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
k =1 |
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
n |
m |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
sν ∏(Tis + 1)∏(Tj2s2 + 2ξ jTjs + 1) |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
i =1 |
j=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
кн (кдs2 + кпs + ки )∏(Tks + 1) |
|
||
= |
|
k =1 |
. |
|
n |
m |
|||
|
|
|||
|
sν +1∏(Tis + 1)∏(Tj2s2 + 2ξ jTjs + 1) |
|
||
|
i =1 |
j=1 |
|
|
|
|
p |
|
|
|
кн (кдs2 + кпs + кi )∏(Tks + 1) |
|
||
= |
|
k =1 |
. |
|
n |
m |
|||
|
|
|||
|
sν +1∏(Tis + 1)∏(Tj2s2 + 2ξ jTjs + 1) |
|
||
|
i =1 |
j=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.16) |
Выполним в (4.16) замену s = jω и |
|
Виконаемо в (4.16) заміну s = jω й |
|||||||||||
получим |
частотную |
передаточную |
отримаємо частотну |
передавальну |
|||||||||
функцию разомкнутой системы в де- |
функцію |
розімкненої |
системи у |
||||||||||
картовых координатах: |
|
|
декартових координатах: |
|
|
||||||||
|
|
|
|
W ( jω) = W ( jω) W ( jω) = |
Uд (ω) |
= |
|
|
|
||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
к |
н |
|
Uз (ω) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
кн (ки − кдω2 + jкпω) |
× |
|
= |
кн (кi − кдω2 + jкпω) |
× |
|||||||
|
|
|
|
|
|
|
|
|
|||||
|
n |
|
|
|
n |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
( jω)ν +1 ∏( jTiω + 1) |
|
|
|
|
( jω)ν +1 ∏( jTiω + 1) |
|
|||||
|
|
i=1 |
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
∏( jTk ω + 1) |
|
= U (ω) + jV (ω), |
|
|
|
||||
|
|
× |
|
k =1 |
|
|
|
|
(4.17) |
||||
|
|
m |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∏(1 − Tj2ω2 + j2ξ jTjω) |
|
|
|
|
|
|
|
|||
где U (ω) |
|
j=1 |
|
де U (ω) – дійсна |
|
|
|
||||||
– вещественная частотная ха- |
частотна |
характе- |
|||||||||||
рактеристика; |
|
|
ристика; |
|
|
|
|
|
|||||
V (ω) |
– мнимая частотная характе- |
|
V (ω) – уявна |
частотна |
характе- |
||||||||
ристика. |
|
|
|
|
ристика. |
|
|
|
|
|
|||
По выражению |
(4.17) запишем |
|
За |
виразом |
(4.17) запишемо |
||||||||
уравнения для ЛАЧХ и ФЧХ |
|
рівняння для ЛАЧХ та ФЧХ |
|
||||||||||
133

L(ω, кп, ки(i) , кд ) = 20lg |
|
|
|
; |
|
|
|||||
U2 (ω, кп, ки(i) , кд ) + V2 (ω, кп, ки(i) , кд ) |
(4.18) |
||||||||||
ϕ(ω, кп, ки, кд ) = arctg |
V (ω, кп, ки, кд ) |
, |
ϕ(ω, кп, кi , кд ) = arctg |
V (ω, кп, кi , кд ) |
, |
||||||
|
|
||||||||||
|
|
|
U (ω, кп, ки, кд ) |
|
|
U (ω, кп, кi , кд ) |
|||||
где L(ω, кп, ки, кд ) – |
|
|
|
|
де L(ω, кп, кi , кд ) – |
|
|
|
(4.19) |
||
ЛАЧХ; |
|
|
ЛАЧХ; |
|
|
||||||
ϕ(ω, кп, ки, кд ) – |
ФЧХ. |
|
|
ϕ(ω, кп, кi , кд ) – |
ФЧХ. |
|
|
||||
Используя |
выражения |
(4.18), |
Використовуючи вирази |
(4.18), |
|||||||
(4.19), получим |
условия |
определения |
(4.19), |
отримаємо |
умови |
визначення |
||||||||||||||
частоты среза ωcp , а также запасов |
частоти зрізу ωзр , а також запасів |
|||||||||||||||||||
устойчивости по амплитуде hз и по |
стійкості за амплітудою hз і за фазою |
|||||||||||||||||||
фазе ϕз : |
L(ωcp , кп, ки, кд ) = 0 ; |
|
|
|
|
ϕз : |
|
|
|
L(ωзр, кп, кi , кд ) = 0 ; |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
(4.20) |
|||||||||
|
hз = L(ω−π , кп, ки, кд ) ; |
|
|
|
|
|
|
hз = L(ω−π , кп, кi , кд ) ; |
(4.21) |
|||||||||||
|
ϕз = ϕ(ωcp , кп, ки, кд ) + 180 , |
|
|
|
|
|
ϕз = ϕ(ωзp , кп, кi , кд ) + 180 , (4.22) |
|||||||||||||
где |
ω−π |
– |
частота, |
соответствующая |
де |
ω−π |
– частота, що |
відповідає |
||||||||||||
величине |
|
фазового |
сдвига |
системы |
величині |
фазового |
зрушення |
системи |
||||||||||||
ϕ(ω−π , кп, ки, кд ) = −180 град. |
|
|
|
|
ϕ(ω−π , кп, кi , кд ) = −180 град. |
|
||||||||||||||
|
На |
первой |
итерации находятся |
|
|
|
На |
|
|
першій ітерації |
знаходяться |
|||||||||
диапазоны |
значений |
параметров ПИД |
діапазони значень параметрів ПІД КЕ, |
|||||||||||||||||
КЭ, |
обеспечивающие |
устойчивость |
що |
забезпечують |
стійкість замкненої |
|||||||||||||||
замкнутой САУ. Для этого необходимо |
САУ. Для цього необхідно сформувати |
|||||||||||||||||||
сформировать множества значений кп , |
множини значень кп , кi , кд : |
|
||||||||||||||||||
ки , кд : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
п |
= 1; к |
п1 ] |
; к |
д |
= |
0; к |
|
; |
|
|
|
||
|
|
|
|
|
|
|
[ |
|
|
|
|
|
д1 |
|
|
|
||||
|
|
|
ки = [0; ки1 ] |
|
|
|
|
|
|
|
|
|
|
|
кi = [0; кi1 ] |
|
|
|||
и для всех возможных сочетаний пара- |
і для усіх можливих сполучень |
|||||||||||||||||||
метров по выражениям (4.20)–(4.22) |
|
параметрів за виразами (4.20)–(4.22) |
||||||||||||||||||
определить частоту среза и запасы ус- |
визначити частоту зрізу та запаси |
|||||||||||||||||||
тойчивости. |
|
|
|
|
|
|
|
стійкості. |
|
|
|
|||||||||
|
Полученные зависимости |
|
|
|
|
|
|
Отримані залежності |
|
|
||||||||||
|
|
ωcp = ωcp (кп, ки, кд ) ; |
|
|
|
|
|
|
|
|
|
ωзp = ωзp (кп, кi , кд ); |
|
|||||||
|
|
h з = h з (кп, ки, кд ); |
|
|
|
|
|
|
|
|
|
h з = h з (кп, кi , кд ); |
|
|||||||
|
|
ϕз = ϕз (кп, ки, кд ) |
|
|
|
|
|
|
|
|
|
|
ϕз = ϕз (кп, кi , кд ) |
|
||||||
удобно представить графически в виде зручно подати графічно у вигляді ліній
134
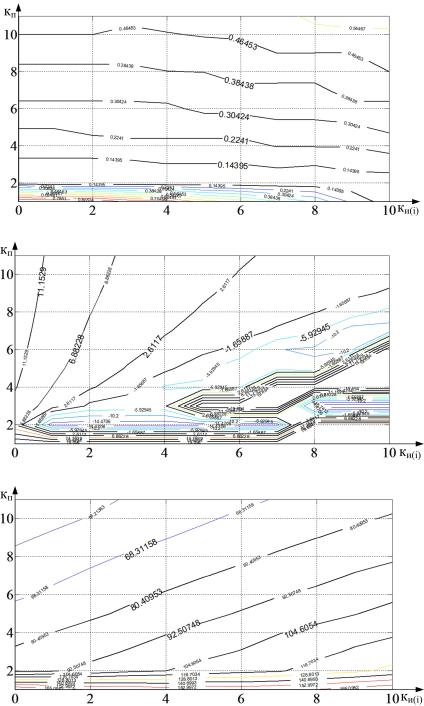
линий равных значений соответственно |
рівних значень відповідно ωзp , h з |
и |
ϕз |
||||
ωcp , h з |
и |
ϕз в плоскости двух |
у площині двох параметрів – кп |
і |
кi |
||
параметров |
– |
кп и ки при фикси- |
при |
фіксованому |
значенні |
|
кд |
рованном значении кд (рис. 4.8). |
(рис. 4.8). |
|
|
|
|||
а
б
в
Рис. 4.8. Линии равных значений при кд = const : а – ωcp = ωcp (кп, ки ) ;
б – h з = h з (кп, ки ) ; в – ϕз = ϕз (кп, ки )
Рис. 4.8. Лінії однакових значень при кд = const : а – ωзp = ωзp (кп, кi ) ;
б – h з = h з (кп, кi ) ; в – ϕз = ϕз (кп, кi )
135
На рис. 4.8, б и 4.8, в определяется |
На рис. 4.8, б і 4.8, в визначається |
||||||||||||
область с отрицательными значениями |
область |
з |
негативними |
значеннями |
|||||||||
запасов |
устойчивости |
– |
область |
запасів стійкості – |
область нестійкості |
||||||||
неустойчивости системы. |
|
|
системи. |
|
|
|
|
|
|
|
|
||
На рис. рис. 4.8, а оцениваются |
За рис. 4.8, а оцінюються взаємне |
||||||||||||
взаимное |
расположение |
|
области |
розташування |
області |
нестійкості |
та |
||||||
неустойчивости |
и желаемой |
частоты |
лінії бажаної |
частоти |
зрізу |
системи |
|||||||
среза системы ωcpж , найденной по |
ωcpб , яку знайдено за формулою (4.14). |
||||||||||||
формуле (4.14). |
|
|
|
|
|
|
|
|
|
|
|
|
|
На второй и, если необходимо, |
На другій і, якщо необхідно, |
||||||||||||
последующих |
итерациях |
требуется |
наступних |
|
ітераціях |
|
потрібно |
||||||
повторить |
построение линий уровня |
повторити побудову линій рівня ωзp , |
|||||||||||
ωcp , h з и ϕз, каждый раз уточняя диа- |
h з і ϕз, кожного разу уточнюючи |
||||||||||||
пазоны значений параметров ПИД кор- |
діапазони |
|
значень |
параметрів ПІД |
|||||||||
ректирующего элемента. |
|
|
коригувального елемента. |
|
|
|
|||||||
Для |
получения |
конкретных |
Для отримання конкретних значень |
||||||||||
значений параметров корректирующего |
параметрів |
коригуючого |
елемента |
на |
|||||||||
элемента на каждой итерации в |
кожній ітерації у площині ліній рівня |
||||||||||||
плоскости |
линий уровня |
выбирается |
обирається точка М з координатами кп , |
||||||||||
точка М с координатами кп , ки , кд . |
кi , кд . При виборі точки М бажано |
||||||||||||
При выборе точки М желательно вы- |
виконання двох умов: |
|
|
|
|
||||||||
полнение двух условий: |
|
|
1) запаси стійкості повинні відпо- |
||||||||||
1) запасы |
устойчивости |
должны |
відати таким умовам: |
|
|
|
|
||||||
соответствовать таким условиям: |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
h з > 20 дБ; ϕз > 40 ; |
|
|
|
|
|
|
|
|
|
2) выбранная точка должна лежать |
2) обрана точка повинна лежати на |
||||||||||||
на линии частоты среза, соответствую- |
лінії частоти зрізу, що відповідає ωзpб , |
||||||||||||
щей ωcpж , или максимально близко к |
або максимально близько до неї. |
|
|||||||||||
ней. |
|
|
|
|
|
|
|
|
|
|
|
|
|
После выбора параметров коррек- |
Після вибору параметрів коригу- |
||||||||||||
тирующего элемента выполняется рас- |
вального елемента виконується розра- |
||||||||||||
чет переходных характеристик скор- |
хунок перехідних характеристик скори- |
||||||||||||
ректированной системы по задающему |
гованої системи за задавальним і за |
||||||||||||
и по возмущающему воздействиям для |
збурним |
діяннями |
для |
визначення |
|||||||||
определения показателей качества и их |
показників якості та їх відповідності |
||||||||||||
соответствия заданным значениям. |
щодо заданих значень. |
|
|
|
|
||||||||
При необходимости можно изме- |
При |
необхідності |
можна |
змінити |
|||||||||
нить координаты точки М, соответ- |
координати точки М, відповідні |
||||||||||||
ствующие необходимым значениям па- |
необхідним |
значенням |
параметрів |
||||||||||
раметров |
корректирующего |
элемента, |
коригувального |
елемента, |
запасам |
||||||||
запасам устойчивости и частоты среза. |
стійкості і частоти зрізу. |
|
|
|
|||||||||
136

4.2.6. Расчет переходных |
4.2.6. Розрахунок перехідних |
характеристик скорректированной |
характеристик скоригованої |
системы, определение показателей |
системи, визначення показників |
качества |
якості |
Для расчета переходных характеристик необходимо записать передаточные функции замкнутой скорректированной САУ по задающему
Фск (s) = X ((s))
Uз s
Фfск (s) = X((s))
F s
Для розрахунку перехідних характеристик необхідно записати передавальні функції замкненої скоригованої САУ за задавальним
= |
|
|
Wпрск (s) |
(4.23) |
|||
1 + Wск (s) |
|||||||
|
|
||||||
та збурним |
|
||||||
|
|
|
Wf |
(s) |
|
||
= |
|
|
пр |
|
|
(4.24) |
|
|
|
+ Wск (s) |
|||||
1 |
|
||||||
воздействиям, |
|
|
|
|
діяннями, |
|
|
|
|
|||
где Wпрск (s) – |
передаточная функция |
де Wпрск (s) – |
передавальна |
функція |
||||||||
прямой цепи скорректированной систе- |
прямої ланки скоригованої системи за |
|||||||||||
мы по задающему воздействию; |
|
задавальним діянням; |
|
|
||||||||
Wf |
(s) – |
передаточная функция |
Wf |
|
(s) |
– |
передавальна |
функція |
||||
пр |
|
|
|
|
|
пр |
|
|
|
|
|
|
прямой цепи скорректированной си- |
прямої ланки скоригованої системи за |
|||||||||||
стемы по возмущающему воздействию; |
збурним діянням; |
|
|
|||||||||
Wск (s) – передаточная функция |
Wск (s) – передавальна функція |
|||||||||||
разомкнутой |
скорректированной |
розімкненої |
скоригованої |
системи за |
||||||||
системы по задающему воздействию. |
задавальним діянням. |
|
|
|||||||||
Используя методику расчета пере- |
Використовуючи методику розра- |
|||||||||||
ходных характеристик разбиением пе- |
хунку перехідних характеристик роз- |
|||||||||||
редаточной функции на элементарные |
биттям передавальної функції на еле- |
|||||||||||
множители [5], можно получить урав- |
ментарні множники [5], можна отри- |
|||||||||||
нения и построить графики переходных |
мати рівняння і побудувати графіки |
|||||||||||
характеристик. |
|
|
|
|
перехідних характеристик. |
|
|
|||||
При формировании входных сту- |
При формуванні вхідних схід- |
|||||||||||
пенчатых воздействий |
их |
амплитуда |
частих впливів їх амплітуда повинна |
|||||||||
должна |
укладываться |
в |
диапазоны |
укладатися |
в |
діапазони |
лінеаризації |
|||||
линеаризации |
статических |
характе- |
статичних характеристик ОАУ. |
|||||||||
ристик ОАУ. |
|
|
|
|
|
|
|
|
|
|
|
|
По |
полученным характеристикам |
За |
отриманими характеристиками |
|||||||||
определяются |
показатели |
качества |
визначаються |
показники |
якості |
|||||||
системы: |
статическая |
ошибка |
uст , |
скоригованої |
|
системи: |
|
статична |
||||
время переходного процесса tпп , |
похибка |
|
uст , час перехідного процесу |
|||||||||
перерегулирование σ . |
|
|
|
tпп , перерегулювання σ . |
|
|
||||||
4.2.7. Разработка схемы набора |
|
4.2.7. Розроблення схеми набору |
||||||||||
137
|
|
передаточной функции КЭ |
|
|
|
|
|
|
|
|
|
|
|
|
|
передавальної функції КЕ |
|||||||||||||||||||||||
|
|
на лабораторном стенде |
|
|
|
|
|
|
|
|
|
|
|
|
|
на лабораторному стенді |
|||||||||||||||||||||||
Передаточная функция |
корректи- |
|
|
|
|
|
Передавальна функція коригуваль- |
||||||||||||||||||||||||||||||||
рующего элемента (4.15), полученная в |
ного елемента (4.15), отримана в ре- |
||||||||||||||||||||||||||||||||||||||
результате |
решения |
задачи |
синтеза |
зультаті вирішення задачі синтезу САУ, |
|||||||||||||||||||||||||||||||||||
САУ, может иметь такие варианты |
може мати такі варіанти структури: |
||||||||||||||||||||||||||||||||||||||
структуры: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П КЕ ( кп ¹ 0 , |
|||
1) |
пропорциональный |
– |
|
П КЭ |
|
|
|
|
|
1) |
|
пропорційний – |
|||||||||||||||||||||||||||
( кп ¹ 0 , ки = 0 , кд = 0 ) |
|
|
|
|
|
|
|
|
|
кi = 0 , кд = 0 ) |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
W |
(s) = |
Uк (s) |
= к |
|
, |
|
|
|
|
|
|
|
|
|
(4.25) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
U (s) |
к |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где кк = кп ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
де кк = кп ; |
|
|
|
|
|
|
|
|
|
||||||||||||||||
2) |
интегральный – И КЭ ( кп = 0 , |
|
|
|
|
|
2) |
|
інтегральний – |
І КЕ ( кп = 0 , |
|||||||||||||||||||||||||||||
ки ¹ 0 , кд = 0 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
кi ¹ 0 , кд = 0 ) |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
W |
(s) = |
Uк (s) |
= |
кк |
, |
|
|
|
|
|
|
|
|
(4.26) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
U (s) s |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где кк = ки ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
де кк = кi ; |
|
|
|
|
|
|
|
|
|
||||||||||||||||
3) |
пропорционально-интегральный |
|
|
|
|
|
3) |
|
пропорційно-інтегральний – ПІ |
||||||||||||||||||||||||||||||
– ПИ КЭ ( кп ¹ 0 , ки ¹ 0 , кд = 0 ) |
|
|
|
|
|
КЕ ( кп ¹ 0 , кi ¹ 0 , кд = 0 ) |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
W |
|
|
(s) = |
Uк (s) |
= |
кк (Tкs + 1) |
, |
|
|
|
|
|
|
(4.27) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
к |
|
|
|
|
U (s) |
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где к |
|
= к |
|
; T = |
кп |
; |
|
|
|
|
|
|
|
|
|
|
|
де к |
|
= к |
i |
; T = |
|
кп |
; |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
к |
|
и |
к |
ки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
к |
|
кi |
|
||||||||
4) пропорционально-дифференци- |
|
|
|
|
|
4) пропорційно-диференціальний – |
|||||||||||||||||||||||||||||||||
альный – |
ПД |
КЭ |
( кп ¹ 0 , |
|
ки = 0 , |
ПД КЕ ( кп ¹ 0 , кi = 0 , кд ¹ 0 ) |
|||||||||||||||||||||||||||||||||
кд ¹ 0 ) |
|
|
|
|
|
|
|
|
|
|
|
Uк (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
W |
(s) = |
= к |
к |
(T s + 1) , |
|
|
|
|
|
|
(4.28) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
U (s) |
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где к |
|
= к |
|
; T = |
кд |
; |
|
|
|
|
|
|
|
|
|
|
|
где к |
|
|
= к |
|
; T |
= |
кд |
; |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
к |
|
п |
к |
кп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
п |
|
к |
|
|
кп |
|
|||||
5) пропорционально-интегрально- |
|
|
|
|
|
5) пропорційно-інтегрально-дифе- |
|||||||||||||||||||||||||||||||||
дифференциальный – |
ПИД КЭ ( кп ¹ 0 , |
ренціальний – |
ПІД КЕ ( кп ¹ 0 , кi ¹ 0 , |
||||||||||||||||||||||||||||||||||||
ки ¹ 0 , кд ¹ 0 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
кд ¹ 0 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
W (s) = |
Uк (s) |
|
= |
кк (Tк1Tк2s2 + ( Tк1 + Tк2 )s + 1) |
, |
(4.29) |
|||||||||||||||||||||||||||||
|
|
|
|
U (s) |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
138