

Методы синтеза систем автоматической стабилизацииции и позиционирования
.pdfПо полученным |
графикам на |
|
За отриманими |
графіками на |
||||||
рис. 3.20, 3.21 определим показатели |
рис. 3.20, 3.21 визначимо показники |
|||||||||
качества (табл. 3.3). |
|
|
якості (табл. 3.3). |
|
|
|||||
|
|
|
|
|
|
|
Таблица 3.3 |
|||
|
|
|
|
|
|
|
Таблиця 3.3 |
|||
|
Показатели качества |
|
u уст , В |
tпп , с |
σ , % |
|
||||
|
(Показники якості) |
|
|
|||||||
|
|
|
|
|
|
|
|
|||
|
По управляющему воздействию |
0 |
|
0,5 |
|
7 |
|
|||
|
(За задавальним діянням) |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
|
По возмущающему воздействию |
0,013 |
|
0,41 |
|
0 |
|
|||
|
(За збурним діянням) |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
Из табл. 3.3 видно, что показатели |
|
З табл. 3.3 видно, що показники |
||||||||
качества удовлетворяют заданным, но |
якості задовольняють заданим, але |
|||||||||
практическая реализация |
форсирую- |
практична реалізація форсуючої ланки |
||||||||
щего звена на лабораторном стенде |
на лабораторному стенді ускладнена. |
|||||||||
затруднительна. Поэтому введем в |
Тому введемо в структуру КЕ інерційну |
|||||||||
структуру КЭ инерционную составля- |
складову і повторимо кроки 4–8. |
|||||||||
ющую и повторим шаги 4–8. |
|
|
|
|
|
|
|
|
||
Выбор структуры |
корректирую- |
|
Вибір |
структури |
коригувального |
|||||
щего элемента. |
|
|
елемента. |
|
|
|
|
|
||
Передаточная функция |
форсиру- |
|
Передавальна функція форсуючого |
|||||||
ющего инерционного корректирующего |
інерційного |
коригувального елемента |
||||||||
элемента имеет вид |
|
|
має вигляд |
|
|
|
|
|
||
W |
(s) = |
Uк (s) |
= |
кк (Tк1s + 1) |
= |
2(0,2s + 1) |
. |
|
|
|
|||||
к |
|
U (s) |
|
(Tк2s + 1) |
|
(Tк2s + 1) |
|
|
|
|
|
||||
Введение инерционной составляющей может ухудшить время переходного процесса и усилить колебательность замкнутой системы. Поэтому необходимо еще раз построить корневой годограф и определить диапазон значений постоянной времени инерционной составляющей Tк2 , соот-
ветствующих требуемым показателям качества.
Введення інерційної складової може погіршити час перехідного процесу і підсилити коливальність замкненої системи. Тому необхідно ще раз побудувати кореневий годограф і визначити діапазон значень сталої часу інерційної складової, що відповідають потрібним показниками якості.
Посроение корневого годографа. |
Побудова кореневого годографа. |
Для построения корневого годо- |
Для побудови кореневого годогра- |
графа в среде Matlab запишем характе- |
фа в середовищі Matlab запишемо ха- |
ристическое уравнение замкнутой сис- |
рактеристичне рівняння замкненої сис- |
темы относительно изменяемого пара- |
теми щодо змінюваного параметра Tк2 : |
метра Tк2 : |
|
109

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W (s) = |
ϒ(s) |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uз (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= Wк (s) Wум (s) WБд (s)Wкв (s) = |
|
|
|
|
|
|
|
|
= Wк (s) Wпп (s) WБд (s)Wкв (s) = |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2,38 |
( |
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
2,38 |
|
|
|
|
|
|
|
|
||||
|
|
= |
|
|
|
|
|
|
0, 2s + 1 |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|||||||||
|
|
s(T |
s + 1)(0,08s + 1)(0,2s + 1) |
s(T |
2 |
s + 1)(0,08s + 1) |
|
|||||||||||||||||||||||||||||||||
|
|
|
к2 |
|
|
ϒ (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|||
|
|
W (s) = |
|
|
|
= W |
|
(s) W |
|
(s) = |
|
|
|
|
7,56 |
|
|
|
|
|
|
; |
|
|||||||||||||||||
|
|
|
Uз (s) |
|
|
s(Tк2s + 1)(0,08s + |
1) |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
пр |
|
д |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
ϒ(s) |
|
|
|
|
|
Wпр (s) |
|
|
|
|
|
|
|
|
|
|
|
2,38 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
Ф(s) = |
|
|
|
= |
|
= |
|
|
|
s (Tк2s + 1)(0,08s + 1) |
|
|
= |
|
|
|
||||||||||||||||||||||
|
|
Uз (s) |
1 + W (s) |
1 + |
|
|
|
|
|
|
|
7,56 |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s (Tк2s + 1)(0,08s + 1) |
|
|
|
|
|
|||||||||||||||
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
2,38 |
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
s3 + (T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
0,08T |
|
|
2 |
+ 0,08)s2 + s + 7,56 |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
к2 |
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
A(s) = 0,08T |
|
|
s3 |
+ (T |
+ 0,08)s2 + s + 7,56 = 0 . |
|
|
|
|
|
|
(3.17) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
к2 |
|
|
|
|
к2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Код |
программы |
для |
|
|
|
реализации |
|
|
|
|
|
|
|
Код |
|
програми |
|
|
для |
реалізації |
||||||||||||||||||||
приведен в прил. А. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
наведено в дод. А. |
|
|
|
|
|
|
|
||||||||||||||
По |
характеристическому |
|
уравне- |
|
|
|
|
|
|
|
За |
характеристичним |
рівнянням |
|||||||||||||||||||||||||||
нию (3.17) строим корневой годограф |
|
(3.17) |
|
будуємо кореневий |
годограф |
|||||||||||||||||||||||||||||||||||
относительно |
неизвестного |
|
|
параметра |
|
|
|
щодо невідомого параметра КЕ і |
||||||||||||||||||||||||||||||||
КЭ и накладываем на него ограничения |
|
|
|
накладаємо на нього обмеження (3.13). |
||||||||||||||||||||||||||||||||||||
(3.13). Внутри полученной области на- |
|
|
|
Усередині отриманої області знахо- |
||||||||||||||||||||||||||||||||||||
ходятся все корни характеристического |
|
|
|
дяться |
всі корені характеристичного |
|||||||||||||||||||||||||||||||||||
уравнения, |
которые |
|
обеспечивают |
|
|
|
рівняння, які забезпечують необхідні |
|||||||||||||||||||||||||||||||||
требуемые показатели качества. График |
|
|
|
показники якості. Графік показано на |
||||||||||||||||||||||||||||||||||||
показан на рис. 3.22. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рис. 3.22. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Рис. 3.22. Корневой годограф для |
Рис. 3.22. Кореневий годограф для |
определения постоянной времени |
визначення сталої часу |
110
Выбор параметров КЭ. |
|
|
|
|
|
|
Вибір параметрів КЕ. |
|
||||||||||||||||
На рис. 3.22 видно, что ветви |
|
На рис. 3.22 видно, що гілки |
||||||||||||||||||||||
корневого |
годографа |
|
пересекают |
кореневого |
годографа |
перетинають |
||||||||||||||||||
границы |
области |
удовлетворительных |
межі області задовільних параметрів у |
|||||||||||||||||||||
параметров в точках |
|
|
|
|
|
|
|
|
точках |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
s11 = −5 + 7,9 j ; s12 = −5 − 7,9 j. |
|
|
|
|
|
|||||||||||||
Выразим |
из |
уравнения |
(3.17) |
|
Виразимо |
з |
рівняння |
(3.17) |
||||||||||||||||
искомый |
|
параметр |
|
передаточной |
шуканий |
параметр |
передавальної |
|||||||||||||||||
функции корректирующего элемента: |
|
функції коригувального елемента: |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
= − |
0,08s2 |
+ s + 7,56 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
(3.18) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
к2 |
|
|
|
0,08s3 + s2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Подставим координаты найденных |
|
Підставимо координати знайдених |
||||||||||||||||||||||
точек в выражение (3.18) и определим |
точок у вираз (3.18) і визначимо |
|||||||||||||||||||||||
значения искомого параметра: |
|
|
|
|
|
значення шуканого параметра: |
|
|||||||||||||||||
|
|
|
Tк2 = − |
0,08(−5 + 7,9 j)2 |
− 5 + 7,9 j + 7,56 |
|
= 0,02 |
с. |
|
|
||||||||||||||
|
|
|
|
0,08(−5 + 7,9 j)3 + (−5 + 7,9 j)2 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Далее |
для |
найденного |
значения |
|
Далі для знайденого значення Tк2 |
|||||||||||||||||||
Tк2 определим третий корень характе- |
визначимо третій корінь характеристи- |
|||||||||||||||||||||||
ристического уравнения (3.17), для чего |
чного рівняння (3.17), для чого скори- |
|||||||||||||||||||||||
воспользуемся функцией roots(p) среды |
стаємось функцією roots(p) середовища |
|||||||||||||||||||||||
Matlab: |
|
|
|
|
|
|
|
|
|
|
|
|
Matlab: |
|
|
|
|
|
|
|
||||
|
|
|
|
A(s) = 0,0016T |
s3 + 0,1s2 + s + 7,56 = 0 ; |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
к2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s13 = −50 . |
|
|
|
|
|
|
|
|
|
|
|
||
Третий корень s13 находится вну- |
|
Третій корінь s13 знаходиться |
||||||||||||||||||||||
три области удовлетворительных пара- |
усередині області задовільних пара- |
|||||||||||||||||||||||
метров, поэтому для дальнейших расче- |
метрів, тому для подальших розра- |
|||||||||||||||||||||||
тов используем полученное |
значение |
хунків використаємо отримане значен- |
||||||||||||||||||||||
постоянной времени Tк2 = 0,02 с. |
|
|
|
ня сталої часу Tк2 = 0,021 с. |
|
|||||||||||||||||||
Таким |
образом, |
|
передаточную |
|
Таким |
|
|
чином, |
передавальна |
|||||||||||||||
функцию |
корректирующего |
элемента |
функція |
коригувального |
елемента |
|||||||||||||||||||
примет вид |
|
|
|
|
|
|
|
|
|
|
|
матиме вигляд |
|
|
|
|
|
|||||||
|
|
|
|
W (s) = |
Uк (s) |
= |
кк (Tк1s + 1) |
= |
2(0,2s + 1) |
. |
|
|
(3.19) |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
к |
|
|
U |
(s) |
|
(Tк2s + 1) |
|
|
(0,02s + 1) |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Построение переходных процессов |
|
Побудова |
перехідних |
процесів |
||||||||||||||||||||
скорректированной системы. |
|
|
|
|
|
скоригованої системи. |
|
|
||||||||||||||||
Запишем |
предаточные |
функции |
|
Запишемо |
предавальні |
функції |
||||||||||||||||||
замкнутой системы по задающему и |
замкненої системи за задавальним і |
|||||||||||||||||||||||
возмущающему воздействиям с учетом |
збурним |
діяннями |
з |
урахуванням |
||||||||||||||||||||
полученной |
передаточной |
функции |
отриманої |
|
передавальної |
функції |
||||||||||||||||||
корректирующего элемента (3.19): |
|
|
|
коригувального елемента (3.19): |
||||||||||||||||||||
111

|
|
|
|
ϒ(s) |
|
|
|
|
|
|
(s) |
|
|
|
|
|
|
|
|
|
2,38(0, 2s + 1) |
|
|
|
|
|
|
||||||||
|
Ф(s) = |
|
|
= |
|
|
Wпр |
= |
|
|
|
s (0,021s + 1)(0,08s + 1)(0, 2s + 1) |
|
|
|
= |
|||||||||||||||||||
|
|
Uз (s) |
1 + W (s) |
|
|
|
|
|
|
7,56 |
( |
0,2s + 1 |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
1 + |
|
|
|
|
|
) |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s (0,021s + 1)(0,08s + 1)(0, 2s + 1) |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
2,38 |
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
0,00168s3 + 0,101s2 + s + 7,56 |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
ϒ(s) |
|
|
|
Wпрf |
(s) |
|
|
|
|
|
|
|
|
− |
|
0,12 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Фf (s) = |
|
= |
|
= |
|
|
|
|
|
s (0, 2s + 1) |
|
|
|
|
|
= |
||||||||||||||||||
|
|
Vв (s) |
1 + W (s) |
|
|
|
|
|
7,56 |
( |
0, 2s + 1 |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 + |
|
|
|
|
) |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
s(0,021s + 1)(0,08s + 1)(0,2s + 1) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
0,12 |
0,021s |
)( |
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
= − |
|
|
+ 1 0,08s + 1 |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
. |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
(0,2s + 1)(0,00168s2 + 0,101s + 7,56) |
|
|
|
|
|
|
|||||||||||||||||||||||||
Для построения переходных про- |
Для побудови перехідних процесів |
||||||||||||||||||||||||||||||||||
цессов САС угла тангажа квадро- |
САС кута тангажа квадрокоптера засто- |
||||||||||||||||||||||||||||||||||
коптера |
воспользуемся |
средой |
суємо середовище |
Matlab/Simulink. |
|||||||||||||||||||||||||||||||
Matlab/Simulink. Графики переходных |
Графіки перехідних процесів показано |
||||||||||||||||||||||||||||||||||
процессов показаны на рис. 3.23, 3.24. |
на рис. 3.23, 3.24. |
|
|
|
|
|
|
||||||||||||||||||||||||||||
а
|
б |
Рис. 3.23. График переходного |
Рис. 3.23. Графік перехідного процессу |
процесса по задающему воздействию: |
за задавальним діянням: |
а – uз (t ) ; б – υ(t ) |
а – uз (t ) ; б – υ(t ) |
112
а
|
б |
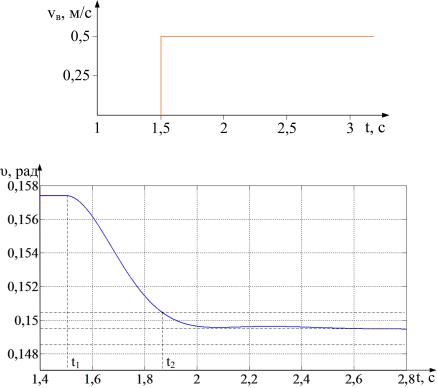
Рис. 3.24. График переходного процесса |
Рис. 3.24. Графік перехідного процессу |
по возмущающему воздействию: |
за збурним діянням: |
а – vв ( t ) ; б – υ( t ) |
а – vв ( t ) ; б – υ( t ) |
По полученным графикам на |
За отриманими графіками на |
рис. 3.23, 3.24 определим показатели рис. 3.23, 3.24 визначимо показники
качества (табл. 3.4). |
якості (табл. 3.4). |
|
||||
|
|
|
|
|
Таблица 3.4 |
|
|
|
|
|
|
Таблиця 3.4 |
|
|
Показатели качества |
|
u уст , |
В |
tпп , с |
σ , % |
|
(Показники якості) |
|
||||
|
|
|
|
|
|
|
|
По управляющему воздействию |
0 |
|
0,57 |
13,6 |
|
|
(За задавальним діянням) |
|
|
|||
|
|
|
|
|
|
|
|
По возмущающему воздействию |
0,013 |
|
0,36 |
0 |
|
|
(За збурним діянням) |
|
|
|||
|
|
|
|
|
|
|
Из табл. 3.4 видно, что показатели качества удовлетворяют требуемым. Само корректирующее устройство имеет достаточно простую структуру, которая легко реализуется на стенде.
Формирование структурной схемы
скорректированной системы. Так как все показатели качества удовлетворяют
З табл. 3.4 видно, що показники якості задовольняють необхідним. Сам коригувальний пристрій має досить просту структуру, яка легко реалізується на стенді.
Формування структурної схеми скоригованої системи. Оскільки всі показники якості задовільняють
113
техническому заданию для систем ста- |
технічним завданням для |
систем |
||
билизации угла тангажа квадрокоптера |
стабілізації кута тангажа квадрокоптера |
|||
и структура |
полученного элемента |
і структура |
отриманого |
елемента |
физически может быть реализуема, |
фізично може бути реалізованою, |
|||
приступим к |
формированию схемы |
приступимо |
до формування схеми |
|
набора КЭ на стенде при помощи |
набору КЕ на стенді за допомогою |
|||
операционных усилителей (рис. 3.25). |
операційних підсилювачів (рис. 3.25). |
|||
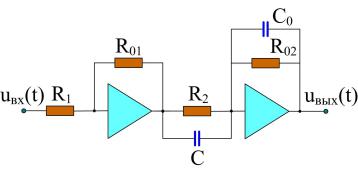
Рис. 3.25. Принципиальная схема |
Рис. 3.25. Принципова схема |
||||
моделирования корректирующего |
моделювання коригувального |
||||
|
элемента |
|
|
елемента |
|
Для |
реализации |
параметров |
Для |
реалізації |
параметрів |
корректирующего элемента используем |
коригувального елемента |
використо- |
|||
соотношения, связывающие номиналы вуємо співвідношення, що зв’язують
резисторов |
|
и |
|
|
конденсаторов |
|
с |
номінали резисторів і конденсаторів з |
||||||||||||||||||||||
параметрами передаточной функции КЭ |
параметрами передавальної функції КЕ |
|||||||||||||||||||||||||||||
(3.12): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.12): |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
W (s) = |
Uк |
(s) |
= |
кк (Tк1s + 1) |
|
, |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
U |
(s) |
|
(Tк2s + 1) |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де |
|
|
|
|
|
|
|
|
|
|
|
|||
|
к |
к |
= |
R01R02 |
= 2 ; T |
= R |
2 |
C = 0, 2 ; T |
= R |
02 |
C |
0 |
= 0,021. |
|||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
R1R2 |
|
|
к1 |
|
|
|
|
|
|
|
к2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Выберем номиналы конденсаторов |
|
|
|
|
Виберемо номінали конденсаторів |
|||||||||||||||||||||||||
C = 1 мкФ, |
C0 = 0,1 мкФ и определим |
|
C = 1 мкФ, C0 = 0,1 мкФ і визначимо |
|||||||||||||||||||||||||||
величину сопротивлений резисторов: |
|
|
|
величину опорів резисторів: |
||||||||||||||||||||||||||
|
R |
2 |
= |
Tк1 |
= |
0,2 |
= 0, 2 Мом; R |
02 |
= |
Tк2 |
= |
0,02 |
|
= 0, 2 Мом; |
||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
C |
1 |
|
|
|
|
|
|
|
C0 |
0,1 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R01 |
= к |
к |
|
= 2 . |
|
|
|
|
|
|
|
|
(3.19) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выберем R1 = 0,5 МОм и по выра- |
|
|
|
|
|
Виберемо R1 = 0,5 МОм і за вира- |
||||||||||||||||||||||||
жению (3.19) найдем R01: |
|
|
|
|
зом (3.19) знайдемо R01: |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
R01 = 2R1 = 1 МОм. |
|
|
|
|
|
|
|
|
|||||||||||
Структурная схема |
|
скорректиро- |
|
|
|
|
|
Структурну схему скоригованої си- |
||||||||||||||||||||||
114

ванной |
системы |
изображена |
на стеми зображено на рис. 3.26. |
рис. 3.26. |
|
|
|
Рис. 3.26. Структурная схема |
Рис. 3.26. Стурктурна схема |
|||||||||
скорректированной системы |
|
скоригованої системи |
||||||||
Метод корневого годографа позво- |
Метод |
кореневого |
годографа |
|||||||
ляет синтезировать |
корректирующий |
дозволяє |
синтезувати |
коригувальний |
||||||
элемент любой сложности в зависимо- |
елемент |
довільної складності залежно |
||||||||
сти от поставленной задачи, используя |
від поставленого завдання, використо- |
|||||||||
различные |
комбинации |
элементарных |
вуючи різні |
комбінації |
елементарних |
|||||
динамических звеньев. |
|
|
|
динамічних ланок. |
|
|
||||
Достоинством |
метода |
|
является |
Перевагою методу |
є |
можливість |
||||
возможность постепенного усложнения |
поступового |
ускладнення |
структури |
|||||||
структуры |
передаточной |
функции |
передавальної |
функції коригувального |
||||||
корректирующего |
элемента |
|
путем |
елемента |
шляхом додавання простих |
|||||
добавления |
простых |
множителей, |
множників, які містять тільки один |
|||||||
которые |
содержат |
|
только |
один |
невідомий параметр. |
|
|
|||
неизвестный параметр.
115
РАЗДЕЛ 4 МЕТОД МОДАЛЬНОГО УПРАВЛЕНИЯ ПО ВЫХОДУ
Розділ 4 МЕТОД МОДАЛЬНОГО УПРАВЛІННЯ ЗА ВИХОДОМ
В мире нет ничего, что совершалось бы |
У світі немає нічого, що відбувалося б |
||||||||
против законов природы. То, что |
|
проти законів природи. Те, що |
|||||||
противоречит законам природы, |
|
суперечить законам природи, |
|||||||
|
|
|
|
|
ложно. |
|
|
|
помилково. |
Микаэль Налбандян (1829–1866) − |
Мікаель Налбандян (1829–1866) – |
||||||||
|
|
|
философ, публицист |
|
|
філософ, публицист |
|||
Одними |
из |
основых |
элементов |
Одними з найголовніших еле- |
|||||
функционирования |
системы |
управле- |
ментів функціонування системи упра- |
||||||
ния как целосного механизма являются |
вління як цілісного механізму є закони |
||||||||
законы управления и их особенности. |
управління і їх особливості. Управління |
||||||||
Управление во многом зависит от пра- |
багато в чому залежить від правильного |
||||||||
вильного выбора регулятора и возмож- |
вибору регулятора і можливості його |
||||||||
ности его настройки. Существует |
налаштування. Існує велика кількість |
||||||||
большое колическтво методов синтеза, |
методів синтезу, одним з яких є метод |
||||||||
одним из которых является метод мо- |
модального управління. |
|
|||||||
дального управления. |
|
|
|
|
|
|
|||
4.1. История развития метода |
4.1. Історія розвитку методу |
||||||||
В истории развития САУ можно |
В історії розвитку САУ можна |
||||||||
условно выделить четыре исторических |
умовно |
виділити |
чотири |
історичні |
|||||
периода: греческая и арабская цивили- |
періоди: грецька і арабська цивили- |
||||||||
зации (III в. до н. э. – 1200 |
г. н. э.), про- |
зації (III ст. до н. е. – 1200 р. н. е.), про- |
|||||||
мышленная революция в Европе (с |
мислова революція в Європі (від тре- |
||||||||
третьей четверти XVIII в., хотя корни |
тьої чверті XVIII ст., хоча коріння її |
||||||||
ее прослеживаются и в начале XVII в.), |
простежуються і на початку XVII ст.), |
||||||||
начало массовых коммуникаций (1910– |
початок |
масових |
комунікацій (1910– |
||||||
1945), век освоения космоса, компью- |
1945), вік освоєння космосу, комп'ю- |
||||||||
терный век (с 1957 г. по наши дни). |
терне століття (від 1957 р. до цього |
||||||||
|
|
|
|
|
|
часу). |
|
|
|
Простейшие |
автоматические |
Найпростіші |
автоматичні регуля- |
||||||
регуляторы и устройства применялись |
тори і пристрої застосовувалися ще до |
||||||||
еще до новой эры. Известно, что |
нової ери. Відомо, що системи |
||||||||
системы |
регулирования |
с |
обратной |
регулювання зі зворотним зв'язком |
|||||
связью применялись в III в. до нашей |
використовувались у III ст. до нашої |
||||||||
эры, например, для автоматического |
ери, наприклад, для автоматичного |
||||||||
регулирования уровня воды в водяных |
регулювання рівня води в водяних |
||||||||
часах |
с |
помощью |
поплавкового |
годинниках за допомогою |
поплавко- |
||||
116
регулятора, чтобы повысить точность |
вого регулятора, щоб підвищити |
|||||||||||||||
их показаний, для регулирования |
точність їх показань, для регулювання |
|||||||||||||||
уровня масла в лампах, дозирования |
рівня масла в лампах, дозування розли- |
|||||||||||||||
разлива жидкостей. В средние века |
ву рідини. У середні віки застосо- |
|||||||||||||||
применялись |
центробежные |
регуля- |
вувалися |
відцентрові регулятори ходу |
||||||||||||
торы |
хода |
водяных |
мукомольных |
водяних борошномельних млинів. У |
||||||||||||
мельниц. В 1657 г. X. Гюйгенс |
1657 р. X. Гюйгенс запропонував |
|||||||||||||||
предложил |
маятниковый |
регулятор |
маятниковий |
регулятор |
ходу |
для |
||||||||||
хода для механических часов. В это же |
механічних годинників. У цей же час |
|||||||||||||||
время |
были |
изобретены регуляторы |
були винайдені регулятори температу- |
|||||||||||||
температуры [1] (для поддержания |
ри [1] (для підтримки температури при |
|||||||||||||||
температуры при плавке металлов в |
плавленні металів у печах; в інкуба- |
|||||||||||||||
печах; в инкубаторах для выведения |
торах для виведення курчат – 1624 |
г.). |
||||||||||||||
цыплят – 1624 |
г.). В конце XVIII в. в |
Наприкінці XVIII ст. в Америці регуля- |
||||||||||||||
Америке |
регуляторы |
температуры |
тори |
температури |
застосовуються в |
|||||||||||
применяются в химических печах, в |
хімічних печах, у виробництві сталі й |
|||||||||||||||
производстве стали и фарфора. |
|
порцеляни. |
|
|
|
|
|
|||||||||
Появление паровых машин приво- |
|
Поява парових машин призводить |
||||||||||||||
дит к изобретению регуляторов давле- |
до винаходу регуляторів тиску. До пер- |
|||||||||||||||
ния. К первым промышленным регуля- |
ших промислових регуляторів нале- |
|||||||||||||||
торам относят автоматический поплав- |
жить автоматичний поплавковий регу- |
|||||||||||||||
ковый регулятор уровня в паровом кот- |
лятор рівня в паровому котлі парової |
|||||||||||||||
ле паровой машины, построенной в |
машини, побудованої в 1765 р. І. І. Пол- |
|||||||||||||||
1765 г. И. И. Ползуновым, и центро- |
зуновим, і відцентровий регулятор |
|||||||||||||||
бежный регулятор скорости для стаби- |
швидкості |
для стабілізації |
кутової |
|||||||||||||
лизации угловой |
скорости |
вращения |
швидкості обертання валу парової ма- |
|||||||||||||
вала паровой машины, сконструиро- |
шини, сконструйованої Д. Уаттом |
|||||||||||||||
ванный Д. Уаттом (1788). Большой |
(1788). Великий внесок у розроблення і |
|||||||||||||||
вклад в разработку и создание регуля- |
створення регуляторів для різних цілей |
|||||||||||||||
торов для различных целей внесли |
зробили російські вчені І. А. Вишне- |
|||||||||||||||
русские ученые И. А. Вышнеградский, |
градський, |
|
М. |
Є. |
Жуковський, |
|||||||||||
Н. Е. Жуковский, A. M. Ляпунов и др. |
A. M. Ляпунов та ін. |
|
|
|
||||||||||||
Среди всего разнообразия структур |
|
Серед |
усього |
розмаїття |
структур |
|||||||||||
регуляторов |
|
необходимо |
выделить |
регуляторів необхідно виділити окре- |
||||||||||||
отдельный |
тип – |
пропорционально- |
мий |
тип |
|
– |
пропорційно-інтегрально- |
|||||||||
интегрально-дифференциальный регу- |
диференціальний регулятор (ПІД-регу- |
|||||||||||||||
лятор (ПИД-регулятор). В английской |
лятор). В англійській термінології: |
|||||||||||||||
терминологии: |
|
proportional-integral- |
proportional-integral-derivative controller |
|||||||||||||
derivative controller (PID controller) [1]. |
(PID controller) [1]. Відомо, що |
|||||||||||||||
Известно, что по меньшей мере 80 % |
щонайменше 80 % регуляторів у про- |
|||||||||||||||
регуляторов в промышленности – |
это |
мисловості – |
це ПІД-регулятри. Завдя- |
|||||||||||||
ПИД-регулятры. Благодаря своей функ- |
ки своїй функціональності, що охоплює |
|||||||||||||||
циональности, охватывающей обра- |
оброблення як часових, так і сталих |
|||||||||||||||
ботку |
как |
временных, |
так |
и |
уста- |
відгуків |
системи, |
пропорційно-інте- |
||||||||
117

новившихся откликов системы, про- |
грально-диференціальне |
управління |
||||
порционально-интегрально-дифферен- |
пропонує найпростіше і разом з тим |
|||||
циальное управление предлагает самое |
найбільш ефективне вирішення бага- |
|||||
простое и вместе с тем наиболее |
тьох проблем управління на цей час. |
|||||
эффективное решение многих проблем |
|
|
|
|
|
|
управления в настоящее время. |
|
|
|
|
|
|
Первые упоминания о данном ре- |
Уперше |
про |
цей |
регулятор |
||
гуляторе в 1788 г. шотландским инже- |
згадувалось ще в 1788 р. шотландським |
|||||
нером и изобретателем Джеймсом Уат- |
інженером і |
винахідником |
Джеймсом |
|||
том [2] в создании парового двигателя с |
Уаттом [2] у створенні парового |
|||||
центробежным регулятором, в системе |
двигуна з відцентровим регулятором, у |
|||||
работы которого осуществлялась об- |
системі |
роботи |
якого здійснювався |
|||
ратная связь с пропорциональным за- |
зворотний зв'язок з пропорційним |
|||||
коном управления (рис. 4.1). Также в |
законом управління (рис. 4.1). Також в |
|||||
1791 г. Гаспар де Прони исследовал |
1791 р. Гаспар де Проні досліджував |
|||||
интегральную составляющую [3], а |
інтегральну складову [3], а Г. Н. Томп- |
|||||
Г. Н. Томпсон в 1857 г. – пропорцио- |
сон в |
1857 |
р. |
– |
пропорційно-дифе- |
|
нально-дифференциальный закон. |
ренціальний закон. |
|
|
|||
Рис. 4.1. Макет парового двигателя |
Рис. 4.1. Макет парового двигуна |
||
с центробежным регулятором |
з відцентровим регулятором |
||
Однако первый пример ПИД-регу- |
Однак перший приклад ПІД-регу- |
||
лятора как целостного механизма в |
лятора як цілісного механізму в 1910 р. |
||
1910 г. представил американский судо- |
представив |
американський |
судовий |
вой пилот и ученый Элмер Сперри [2] |
пілот і вчений Елмер Сперрі [2] для |
||
для автоматизации рулевого механизма. |
автоматизації |
рульового |
механізму. |
Позже его сын Лоуренс Сперри в |
Пізніше його син Лоуренс Сперрі в |
||
1914 г. продемонстрировал использова- |
1914 р. продемонстрував використання |
||
ние гироскопа и элерона для баланси- |
гіроскопа і елерона для балансування |
||
ровки самолета в воздухе. |
літака в повітрі. |
|
|
Хотя пропорциональный, инте- |
Хоча пропорційний, інтегральний і |
||
118