

I. Устройство и условное обозначение на схемах.
Асинхронный двигатель состоит из статора, ротора и подшипниковых щитов (рис. 11.1). Статор – неподвижная часть двигателя – имеет цилиндрическую форму. Он состоит из корпуса 1, сердечника 2 и обмотки 3. Корпус литой стальной или чугунный. Магнитопровод статора собирается из тонких листов электротехнической стали. На внутренней поверхности он имеет пазы, в которые укладывается обмотка статора. Ротор асинхронного двигателя – вращающаяся часть – состоит из стального вала 4, магнитопровода 5, набранного из листов электротехнической стали с выштампованными пазами. Обмотка ротора бывает короткозамкнутой или фазной. Короткозамкнутая обмотка выполняется из алюминиевых или медных стержней, замкнутых с обоих торцов ротора накоротко. Фазный ротор имеет трехфазную обмотку, соединенную в звезду. Выводы обмотки подсоединены к кольцам на валу и с помощью щеток подсоединяются к реостату или другому устройству. Вращающийся ротор размещают на общем валу cо статором. Вал вращается в подшипниковых щитах. Соединение обмотки статора осуществляется в коробке, в которую выведены начала фаз С1, С2, С3 и концы фаз С4, С5, С6. На рис. 11.2 показаны схемы расположения этих выводов (рис. 11.2 а) и способы соединения их между собой при соединении фазных обмоток звездой (рис. 11.2 б) и треугольником (рис. 11.2 в).
Рис. 11.1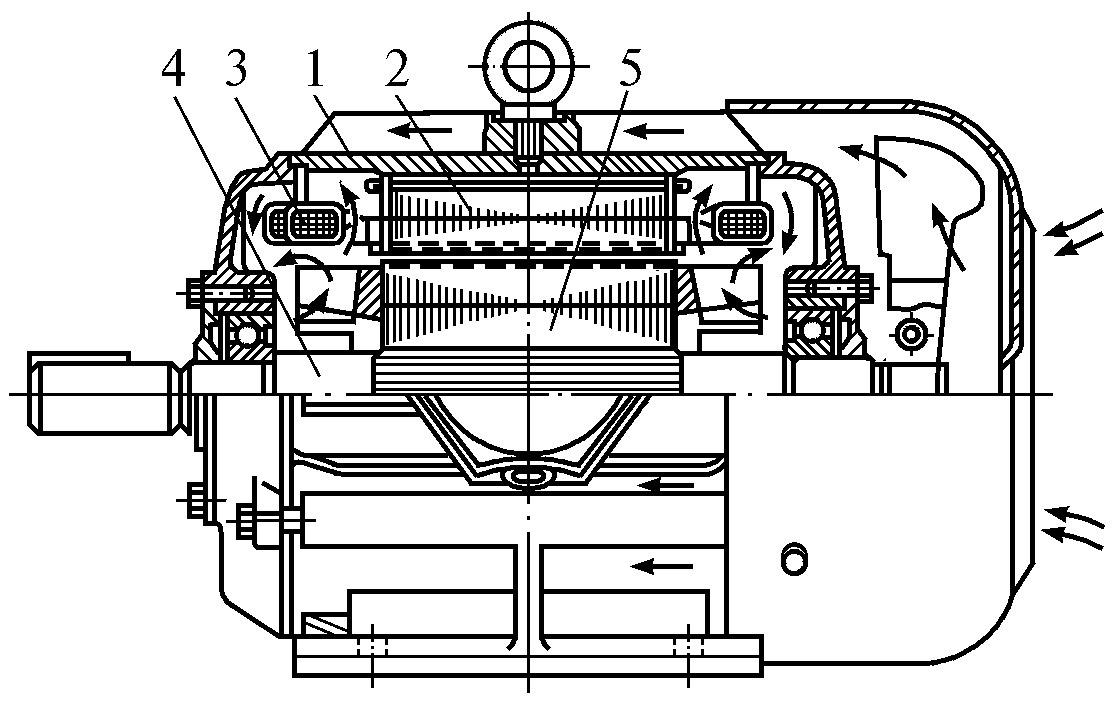

а) б) в)
Рис. 11.2
II. Получение вращающегося магнитного поля и принцип действия ад.
Основой действия асинхронного двигателя является вращающееся магнитное поле. Принцип получения вращающегося магнитного поля заключается в том, что если по системе проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле.
Рассмотрим получение вращающегося поля в трехфазном двигателе. На рис. 11.3 показаны три фазные обмотки A – X, B – Y, C – Z, каждая в виде одного витка. От источника питания к обмоткам подводится трехфазная система токов
![]() ;
;![]() ;
;![]() .
(11.1)
.
(11.1)
Положительные
направления токов приняты от начала
обмотки к концу, а соответствующие им
пульсирующие магнитные потоки образуют
трехфазную звезду
![]() .
.
Рассмотрим результирующий магнитный поток для нескольких моментов времени.
В начальный момент
времени при
![]() = 0
= 0


а) б)
Рис. 11.3
Им соответствуют магнитные потоки
![]() ;
;
![]() ;
;
![]() ,
,
где
![]() – максимальное значение потока фазы.
– максимальное значение потока фазы.
Результирующий магнитный поток в 1,5 раза больше фазного и направлен по вертикали вниз.
В момент времени
![]() токи в обмотках
токи в обмотках
![]() .
.
Этим токам соответствуют магнитные потоки
![]() ;
;
![]() .
.
На рис. 11.4 б показаны векторы результирующего магнитного потока и его составляющие. Направление потока отличается от предыдущего на 90°, а его значение не изменилось
![]() .
.
В
момент времени
![]() ,
соответствующий
,
соответствующий
![]() ,
токи в обмотках:
,
токи в обмотках:
![]()
Этим токам соответствуют магнитные потоки
![]() .
.
На рис. 11.4 в показаны результирующий магнитный поток и его составляющие. По сравнению с начальным моментом времени результирующий магнитный поток изменил направление на 180°, а его значение осталось неизменным и равным
![]() .
.![]() ;
;
![]() .
.

Таким образом, трехфазная обмотка, питаемая сдвинутыми на 120° токами, создает вращающееся магнитное поле. Результирующий поток остается неизменным и равным 1,5 от максимального потока фазы. Направление этого потока всегда совпадает с направлением магнитного потока той фазы, ток в которой в данный момент максимален. Поэтому для изменения направления вращения необходимо поменять местами любые две фазы.
Рассмотренные
примеры относятся к двухполюсному
исполнению обмотки (![]() )
при частоте вращения поля
)
при частоте вращения поля
![]() .
В общем случае частота вращения поля
.
В общем случае частота вращения поля
![]() ,
,
где
![]() – число пар полюсов машины;
– число пар полюсов машины;
![]() – частота тока статора.
– частота тока статора.
Итак, трехфазная обмотка статора создает магнитное поле, вращающееся со скоростью
.
Электромагнитное взаимодействие между статором и ротором возникает только при неравенстве скорости поля статора и скорости вращения ротора.
Отношение
![]() (11.3)
(11.3)
Рис. 11.5
или
![]() (11.4)
(11.4)
называется скольжением асинхронной машины.
В зависимости от
соотношения
![]() и
различают три режима работы: в режиме
двигателя; в режиме генератора; в
режиме электромагнитного тормоза.
и
различают три режима работы: в режиме
двигателя; в режиме генератора; в
режиме электромагнитного тормоза.
Работа в режиме
двигателя. На рис. 11.5 показано
магнитное поле статора, вращающееся по
часовой стрелке. При
![]() линии поля статора перемещаются
относительно ротора также по часовой
стрелке со скоростью
линии поля статора перемещаются
относительно ротора также по часовой
стрелке со скоростью
![]() .
Согласно правилу правой руки ЭДС в
проводниках ротора под северным полюсом
направлены к нам, в проводниках под
южным полюсом – от нас. То же направление
имеют и активные составляющие токов
в проводниках. Электромагнитные силы
взаимодействия магнитных полей статора
и ротора создают вращающий момент в
направлении вращения поля статора.
Скорость
.
Согласно правилу правой руки ЭДС в
проводниках ротора под северным полюсом
направлены к нам, в проводниках под
южным полюсом – от нас. То же направление
имеют и активные составляющие токов
в проводниках. Электромагнитные силы
взаимодействия магнитных полей статора
и ротора создают вращающий момент в
направлении вращения поля статора.
Скорость
![]() ,
с которой вращается двигатель, зависит
от его нагрузки. При холостом ходе
скорость
становится почти равной
,
так как при
= 0 ЭДС и токи в роторе равны нулю и
электромагнитное взаимодействие
исчезает. Таким образом, асинхронная
машина работает в режиме двигателя в
пределах от
= 0 до
,
с которой вращается двигатель, зависит
от его нагрузки. При холостом ходе
скорость
становится почти равной
,
так как при
= 0 ЭДС и токи в роторе равны нулю и
электромагнитное взаимодействие
исчезает. Таким образом, асинхронная
машина работает в режиме двигателя в
пределах от
= 0 до
![]() ,
т.е. при скольжении от
,
т.е. при скольжении от
![]() +1 до
+1 до
![]() 0. При этом электрическая энергия,
подводимая к статору из сети,
преобразовывается в механическую
энергию на валу.
0. При этом электрическая энергия,
подводимая к статору из сети,
преобразовывается в механическую
энергию на валу.
Работа в режиме
генератора. Предположим, что подключенный
к сети статор создает вращающееся
магнитное поле, а ротор приводится во
вращение в том же направлении со скоростью
![]() .
В этом случае скольжение будет
отрицательным, а ЭДС и токи ротора
изменяют направление по сравнению с
работой в режиме двигателя. Момент
на валу становится тормозящим по
отношению к вращающему моменту
первичного двигателя. Асинхронная
машина работает генератором.
Механическая энергия, подведенная к
валу, преобразовывается в электрическую
энергию и отдается в сеть. Таким образом,
асинхронная машина может работать в
режиме генератора параллельно с
сетью в пределах от
.
В этом случае скольжение будет
отрицательным, а ЭДС и токи ротора
изменяют направление по сравнению с
работой в режиме двигателя. Момент
на валу становится тормозящим по
отношению к вращающему моменту
первичного двигателя. Асинхронная
машина работает генератором.
Механическая энергия, подведенная к
валу, преобразовывается в электрическую
энергию и отдается в сеть. Таким образом,
асинхронная машина может работать в
режиме генератора параллельно с
сетью в пределах от
![]() до
до
![]() ,
т.е. при скольжении от
,
т.е. при скольжении от
![]() до
до
![]() .
.
Работа в режиме
электромагнитного тормоза. Допустим,
что ротор приводится во вращение
против направления вращения магнитного
потока статора. В этом случае к асинхронной
машине подводится энергия с двух сторон
– электрическая из сети и механическая
от первичного двигателя. Такой режим
работы называется режимом
электромагнитного тормоза. Он возникает
при скольжении от
![]() до
до
![]() .
Примером практического применения
режима электромагнитного тормоза
является опускание груза в
подъемно-транспортных устройствах.
.
Примером практического применения
режима электромагнитного тормоза
является опускание груза в
подъемно-транспортных устройствах.