

Вопросы для повторения
Ускорение какой точки плоской фигуры можно найти по уравнениям ее движения?
Как определяется ускорение любой точки плоской фигуры?
Чему равны и как направлены составляющие и
 в равенстве
в равенстве
 =
= +
+
?
+
+
?Какие существуют методы решения уравнения = + + ?
Как направлено ускорение точки В, если угловая ско-рость постоянна, а ускорение полюса А направлено по прямой АВ?
Как направлено ускорение точки В, если плоская фигура совершает мгновенно поступательное движение, а ускорение точки А, перпендикулярно прямой АВ?
Что можно сказать об угловой скорости плоской фигуры, если ускорение точки А равно нулю, а ускорение точки В направлено вдоль прямой АВ?
3.5.* Сферическое движение твердого тела
Рассмотрим движение твердого тела, одна из точек которого остается неподвижной. При таком движении все другие точки тела движутся по сферическим повер-хностям, центры которых совпадают с неподвижной точкой. Такое движение твердого тела называют сферическим.
Для определения положения тела в каждый момент времени проведем через его неподвижную точку две системы координат: неподвижную Oхуz с началом в точке О и подвижную Оξηζ, жестко связанную с телом и началом в той же точке О (рис. 3.37).
OJ – линия пересечения подвижной и неподвижной систем координат, называется линией узлов.
![]() -
называется углом прецессии;
-
называется углом прецессии;
![]() φ-
угол собственного вращения;
φ-
угол собственного вращения;
![]() -
угол нутации.
-
угол нутации.
Углы φ, ψ, θ - называются углами Эйлера, эти названия заимствованы из астрономии.
П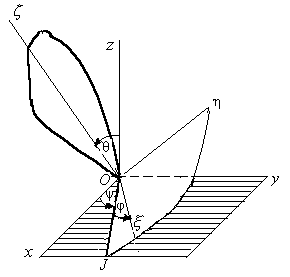 ри
сферическом дви-жении тела углы φ, ψ,
θ непрерывно меняются во времени, то
есть являются функциями времени
ри
сферическом дви-жении тела углы φ, ψ,
θ непрерывно меняются во времени, то
есть являются функциями времени
![]() . (3.44)
. (3.44)
Эти равенства называ-
Рис. 3.37 ются уравнениями или законом движения тела вокруг неподвижной точки (сферического движения твердого тела).
Положения твердого тела в пространстве определя-ется положением 3-х его точек не лежащих на одной прямой. Действительно 2 точки определяют некоторую ось, а третья точка – положение тела по отношению к этой оси. Следовательно, положение твердого тела можно определить положением 2-х его точек не лежащих на одной прямой с неподвижной точкой. С помощью теоремы Даламбера - Эйлера можно представить себе картину движения тела. Примем ее без доказательства.
Твердое тело, имеющее одну неподвижную точку можно переместить из одного положения в любое другое поворотом вокруг некоторой оси, проходящей через неподвижную точку.
С ледовательно,
если в каждый момент времени ско-рости
точек одной из прямых тела равны нулю,
то его движение в каждый момент времени
можно рассмат-ривать как вращение вокруг
этой прямой, проходящей через неподвижную
точку и называемую мгновенной осью
вращения. Положение мгновенной оси
вращения с течением времени непрерывно
меняется как в теле, так и в неподвижном
пространстве. Угловая скорость этого
вращения называется мгновенной
угловой скоростью. Ее вектор
откладывается вдоль мгновенной оси
враще-ния в ту сторону, откуда мы видим
вращение, происходя-щим против хода
часовой стрелки.
ледовательно,
если в каждый момент времени ско-рости
точек одной из прямых тела равны нулю,
то его движение в каждый момент времени
можно рассмат-ривать как вращение вокруг
этой прямой, проходящей через неподвижную
точку и называемую мгновенной осью
вращения. Положение мгновенной оси
вращения с течением времени непрерывно
меняется как в теле, так и в неподвижном
пространстве. Угловая скорость этого
вращения называется мгновенной
угловой скоростью. Ее вектор
откладывается вдоль мгновенной оси
враще-ния в ту сторону, откуда мы видим
вращение, происходя-щим против хода
часовой стрелки.
Скорости точек твердого тела, имеющего одну непод-вижную точку, определяются формулой Эйлера
![]() ,
(3.45)
,
(3.45)
где - вектор мгновенной
Рис.
3.38 угловой скорости,
![]() -
радиус-
-
радиус-
вектор рассматриваемой точки М относительно неподви-жной точки О тела (рис. 3.38).
Модуль скорости равен
![]() ,
(3.46)
,
(3.46)
где h – расстояние от точки М тела до мгновенной оси вращения ОР. Из-за непрерывного изменения положения оси ОР это расстояние будет переменным.