

3.4.9. Мгновенный центр ускорений
При непоступательном движении твердого тела в его сечении (S) в каждый момент времени имеется точка Q, ускорение которой равно нулю. Эта точка называется мгновенным центром ускорений (МЦУ).
Определяется
положение центра Q,
если известно ускорение
какой-нибудь точки тела и величины
![]() ,
следующим образом:
,
следующим образом:
вычисляем величину угла по формуле
 ,
,от точки А под углом к вектору проводим пря-мую АЕ (рис. 3.32); при этом прямая должна быть откло-нена от в сторону вращения, если вращение ускорен-ное и против вращения, если оно замедленное,
откладываем вдоль линии АЕ отрезок AQ, равный
![]() .
(3.40)
.
(3.40)
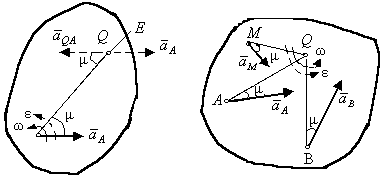
Рис. 3.32 Рис. 3.33
Построенная таким путем точка Q и будет мгновенным центром ускорений (МЦУ). В самом деле, по формулам (3.37) и (3.38) заключаем, что
ускорение любой точки тела равно ее ускорению во вращательном движении вокруг МЦУ, а
![]() ,
(3.41)
,
(3.41)
при этом
![]() ,
(3.42 )
,
(3.42 )
то есть ускорения точек тела пропорциональны их расстояниям до МЦУ (рис. 3.33)
М
 ЦУ
и МЦС – являются различными точками
сечения (S) фигуры.
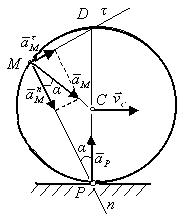
Например, колесо катится без скольжения
по прямолинейному пути (рис. 3.34), причем
скорость его центра постоянна (
ЦУ
и МЦС – являются различными точками
сечения (S) фигуры.
Например, колесо катится без скольжения
по прямолинейному пути (рис. 3.34), причем
скорость его центра постоянна ( ).
Тогда мгновенный центр скоростей колеса
находится в точке Р (
).
Тогда мгновенный центр скоростей колеса
находится в точке Р ( =
0) – в точке касания с землей. Мгновенный
центр ускорений в этом случае, очевидно,
находится в точке С, так как она
движется равномерно и прямоли-нейно и
=
0) – в точке касания с землей. Мгновенный
центр ускорений в этом случае, очевидно,
находится в точке С, так как она
движется равномерно и прямоли-нейно и
 .
Центры скоростей и ускорения совпада-ют
тогда, когда тело вращается вокруг
неподвижной оси.
.
Центры скоростей и ускорения совпада-ют
тогда, когда тело вращается вокруг
неподвижной оси.
Пример. Колесо катится по прямолинейному рельсу так, что скорость его центра постоянна . Определить ускорение точки М обода колеса (рис. 3.34).
Решение. Так как точка С, как показано выше, в данном случае
Рис. 3.34 является мгновенным центром
ускорений – МЦУ, а мгновенный центр скоростей находится в точке Р, то для колеса

По
формуле (3.41) находим
![]() .
Следовательно, ускорения любой точки
обода колеса (в том числе и точки Р)
равны и направлены к центру С
колеса, так
как угол μ =
0. Но ускорение точки М
не будет нормальным ускорением. Так
как скорость точки М
направлена
перпендикулярно РМ,
то касательная Мτ
к
траектории точки
М направлена
вдоль МD,
а
главная нормаль
Мп
– вдоль МР.
Поэтому
.
Следовательно, ускорения любой точки
обода колеса (в том числе и точки Р)
равны и направлены к центру С
колеса, так
как угол μ =
0. Но ускорение точки М
не будет нормальным ускорением. Так
как скорость точки М
направлена
перпендикулярно РМ,
то касательная Мτ
к
траектории точки
М направлена
вдоль МD,
а
главная нормаль
Мп
– вдоль МР.
Поэтому
![]() .
.
3.4.10. План ускорений и его свойства
Планом ускорений звена плоского механизма назы-вается графическое построение, представляющее собой плоский пучок, лучи которого изображают абсолютные ускорения точек звена, а отрезки, соединяющие концы лучей, изображают относительные ускорения соответ-ствующих точек в данном положении звена. Совокуп-ность планов ускорений звеньев с одним общим полюсом и одним масштабом называется планом ускорения механизма.
Основные свойства плана ускорений:
векторы абсолютных ускорений точек фигуры выходят из полюса плана ускорений;
векторы относительных ускорений точек фигуры изображаются отрезками, соединяющими концы векто-ров абсолютных ускорений;
фигура на плане ускорений (отрезок, прямоуголь-ник, многоугольник и др.), образуемая относительными ускорениями, подобна одноименной фигуре на движу-щемся неизменяемом теле и повернута относительно последнего на угол (180°-µ) по направлению углового ускорения вращения тела;
порядок букв при обходе по контурам одноимен-ных фигур, как на плане ускорений, так и на неизменяе-мой фигуре, одинаковый. При этом обход надо начинать от одной и той же буквы и производить в одном и том же направлении, как на плане ускорений, так и неизменяе-мой фигуре.
Рассмотрим пример построения плана ускорений. Определим ускорения точек В, С и D фигуры АВС (рис. 3.35, а), если известны ускорение точки А и линия действия ускорения точки В.
Построим фигуру АВС (рис. 3.35, а) в выбранном масштабе длин λL. Определим ускорение точки В, прове-дя графическое решение уравнения, выражающего тео-рему о сложении ускорений точки тела, совершающего плоскопараллельное движение
![]() .
(3.43)
.
(3.43)
То
есть, вектор ускорения
,
точки В фигуры, совер-шающей
плоскопараллельное движение, равен
геометри-ческой сумме векторов: ускорения
точки А, принятой за полюс, и ускорения
![]() от вращения точки В вместе с телом
вокруг полюса А.
от вращения точки В вместе с телом
вокруг полюса А.
Здесь и далее вектор, известный по величине и направлению, подчеркнут двумя линиями, а вектор, известный по величине или направлению, подчеркнут одной линией, под которой указано это направление.
Решим графически уравнение (3.43) с помощью
пла-на ускорений при условии, что линия
действия вектора ускорения
точки
В известна. Для этого из произвольно
выбранного полюса π (рис. 3.35, б)
отложим в выбранном масштабе ускорений
λа вектор
![]() ,
изображающий уско-рение
.
К концу этого вектора (к точке а)
согласно уравнению (3.43) прикладываем
вектор, изображающий ускорение
,
изображающий уско-рение
.
К концу этого вектора (к точке а)
согласно уравнению (3.43) прикладываем
вектор, изображающий ускорение
![]() в том же масштабе. Модуль вектора равен
в том же масштабе. Модуль вектора равен
![]() ,
а угловая скорость ωАВ,
уже определена планом скоростей
(см. пример п. 3.4.6).
,
а угловая скорость ωАВ,
уже определена планом скоростей
(см. пример п. 3.4.6).
К концу
п
этого вектора
прикладываем вектор каса-тельного
ускорения
![]() .
Так как модуль
этого вектора не известен, то через
точку п
проводим только линию дей-ствия этого
вектора (линию, перпендикулярную к АВ
на фигуре АВС).
А через полюс π
проведем линию действия вектора
.
Точку пересечения
линий действия назван-ных векторов
обозначим буквой b.
После этого соеди-ним точки а
и b,
а так же полюс π
с точкой b.
Вектор
.
Так как модуль
этого вектора не известен, то через
точку п
проводим только линию дей-ствия этого
вектора (линию, перпендикулярную к АВ
на фигуре АВС).
А через полюс π
проведем линию действия вектора
.
Точку пересечения
линий действия назван-ных векторов
обозначим буквой b.
После этого соеди-ним точки а
и b,
а так же полюс π
с точкой b.
Вектор
![]() и будет изображать ускорение
точки
В.
Направлен вектор нормального ускорения
и будет изображать ускорение
точки
В.
Направлен вектор нормального ускорения
![]() по
АВ
от точки
В
к точке
А.
по
АВ
от точки
В
к точке
А.
Ускорение точки С определим с помощью
свойства подобия фигур тела и плана
ускорений. Для этого на стороне аb
плана ускорений строим треугольник
аbс, подобный треугольнику АВС,
и в таком же положении, чтобы обход по
контурам этих треугольников был в одном
направлении (рис. 3.35, в). Для построения
треугольника аbс, подобного АВС,
использовано равен-ство углов. Соединив
полюс π с точкой с, получим век-тор
![]() ,
который и будет изображать ускорение
,
который и будет изображать ускорение
![]() точки С.
точки С.
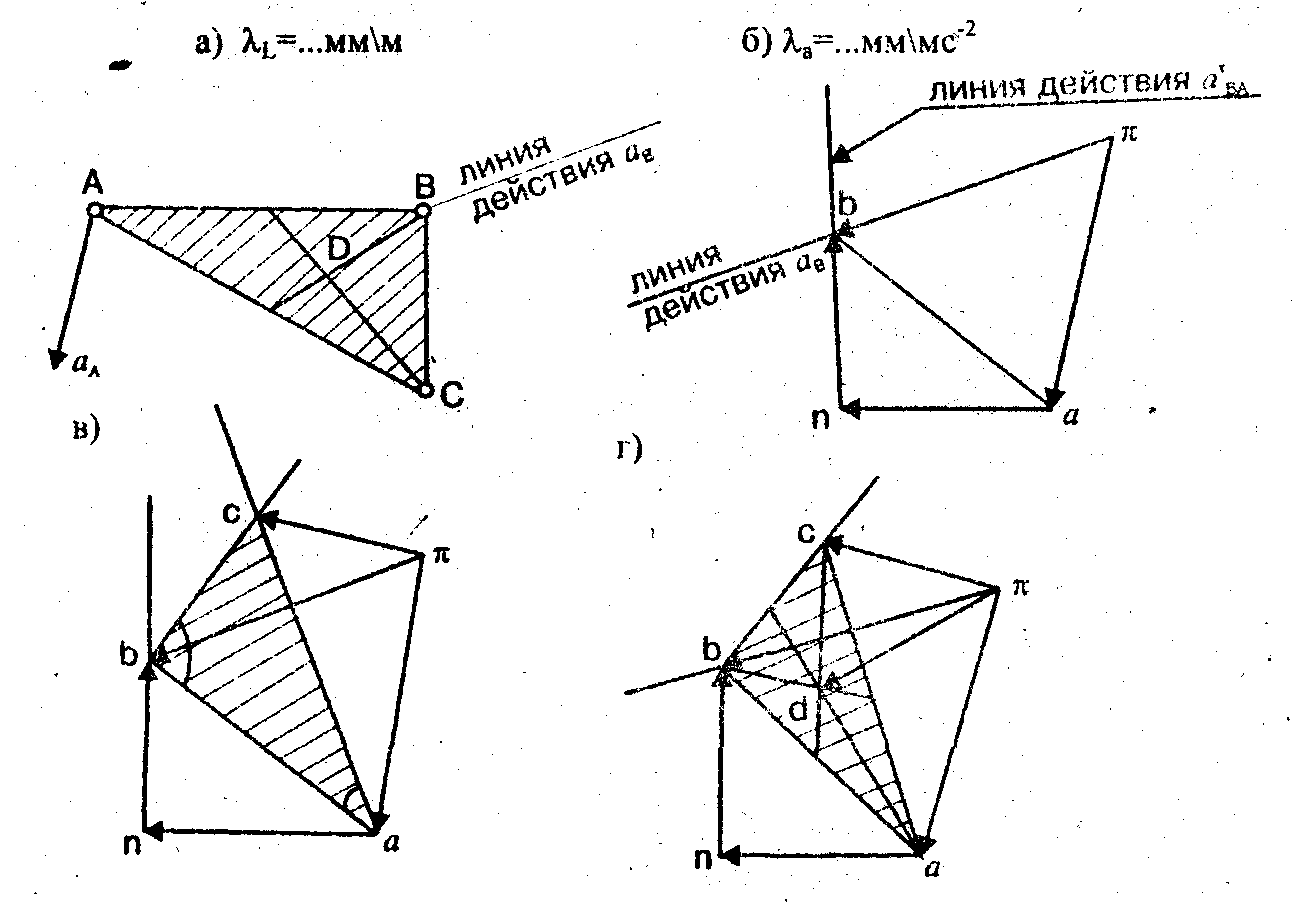
Рис. 3.35. Определение ускорений точек фигуры АВС
а) фигура АВС; б) определение ускорения точки В;
в) определение ускорения точки С; г) определение ускорения точки Д
Определим ускорение точки D, с помощью
свойства подобия. Точка D лежит на
пересечении медиан треу-гольника АВС
(рис. 3.35, а). Следовательно, в одно-именном
треугольнике abc плана ускорений
точка d лежит также на пересечении
медиан последнего. Прове-дем медианы
треугольника аbc (рис. 3.35, г).
Соединим полюс π с точкой d пересечения
медиан, получим вектор
![]() ,
который и будет изображать ускорение
,
который и будет изображать ускорение
![]() точки D.
точки D.
С помощью вектора можно определить значение и направление углового ускорения ε плоской фигуры
![]() или
или
![]() ,
,
где πb – отрезок, взятый с плана ускорений, λa – масштаб ускорений.
При определении направления углового
ускорения, вектор
![]() ,
изображающий слагаемое
в уравнении (3.43), мысленно перенесем с
плана ускорений параллельно самому
себе в точку В на плоской фигуре.
Тогда видно, что угловое ускорение ε
направлено против хода часовой стрелки
при вращении фигуры вокруг полюса А.
,
изображающий слагаемое
в уравнении (3.43), мысленно перенесем с
плана ускорений параллельно самому
себе в точку В на плоской фигуре.
Тогда видно, что угловое ускорение ε
направлено против хода часовой стрелки
при вращении фигуры вокруг полюса А.
Пример. Определить ускорения точек А, В, С, D и угловые ускорения звеньев механизма для положения, изображенного на чертеже (рис. 3.36, а), если кривошип ОА вращается с постоянной угловой скоростью ω1. Кривошип О1В соединен шарниром с серединой шатуна АС.
Решение: 1) Выбрав масштаб длин λL=…мм/м. (например, если 1 мм чертежа фигуры содержит 0,1 м длины реальной фигуры, то λL=10 мм/м), изображаем механизм в данном положении (рис. 3.36, а).
2) Определение скоростей точек А, В, С и D. Определим скорость точки А по величине и направлению. Так как криво-шип вращается вокруг неподвижной оси, проходящей через неподвижную точку О, то модуль скорости точки А равен vА=ω1ОА и направлен вектор скорости перпендикулярно ОА в сторону направления угловой скорости ω1. Построим план скоростей (см. пример п. 3.4.6) в выбранном масштабе по скорости λv=…мм/мс-1 (например, если один мм плана скоростей содержит скорость 0,5 м/с, то λv=2мм/мс-1). Измерим на плане скоростей (рис. 3.36, б) отрезки Оb, Ос, Оd , аb и определим модули скоростей точек В, С, D, угловую скорость ω2 тела АВСD и угловую скорость ω3 звена О1В по формулам:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
3) Определение . При вращательном движении твердо-го тела вокруг неподвижной оси ускорение точки А равно
Р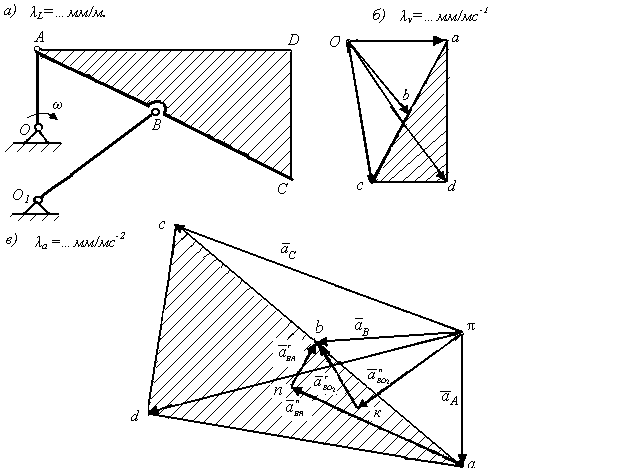 ис.
3.36
ис.
3.36
![]() .
Так как кривошип ОА
вращается с постоян-ной угловой скоростью
ω1,
то ускорение
.
Так как кривошип ОА
вращается с постоян-ной угловой скоростью
ω1,
то ускорение
![]() =
0, а ускорение
точки А
будет равно только нормальной составляющей
уско-рения
=
0, а ускорение
точки А
будет равно только нормальной составляющей
уско-рения
![]() .
Определим величину ускорения точки А
по формуле
.
Определим величину ускорения точки А
по формуле
![]() .
Выбрав масштаб ускорений
λа=
… мм/мс-2
(например, 1 мм
плана ускорений
содержит 10 м/с-2,
то
λа
=0,1 мм/мс-2),
отложим в этом масштабе от некоторого
центра π вектор
.
Выбрав масштаб ускорений
λа=
… мм/мс-2
(например, 1 мм
плана ускорений
содержит 10 м/с-2,
то
λа
=0,1 мм/мс-2),
отложим в этом масштабе от некоторого
центра π вектор
![]() ,
направленный
по ОА
от точки А.
,
направленный
по ОА
от точки А.
4. Определение . Точка В механизма принадлежит зве-ну АВСD, совершающему плоскопараллельное движение. Следовательно, по теореме о сложении ускорений (3.43), если за полюс взять точку А, ускорение которой известно, ускорение точки В будет равно
.
С другой стороны точка В так же принадлежит звену О1В, которое совершает вращательное движение вокруг неподвижной оси, проходящей через точку О1, а ускорение точки В соответственно будет равно
![]() .
.
Приравнивая правые части полученных выражений, имеем
![]() =
=
![]() .
.
Выразим это
равенство графически. К вектору
от точки а
на плане
ускорений откладываем в выбранном
масш-табе вектор
![]() =
(
║
ВА
и направлен от точки В
к точ-ке А)
и от точки п
проводим прямую
пb,
перпендикулярную ап.
Эта прямая
дает направление
и где-то на ней
должен лежать конец искомого вектора
=
(
║
ВА
и направлен от точки В
к точ-ке А)
и от точки п
проводим прямую
пb,
перпендикулярную ап.
Эта прямая
дает направление
и где-то на ней
должен лежать конец искомого вектора
![]() .
.
Теперь от точки π
откладываем
вектор
![]() =
=
![]() (
||ВО1)
и проводим перпендикулярную к нему
прямую κb,
дающую направление
(
||ВО1)
и проводим перпендикулярную к нему
прямую κb,
дающую направление
![]() .
Конец вектора
должен лежать
и на этой прямой. Следовательно, точка
b
пересечения линий пb
и
κb и
дает конец вектора
.
Таким образом
=
.
Измерив длину πb
и учитывая
масштаб, найдем в нашем случае, что
.
Конец вектора
должен лежать
и на этой прямой. Следовательно, точка
b
пересечения линий пb
и
κb и
дает конец вектора
.
Таким образом
=
.
Измерив длину πb
и учитывая
масштаб, найдем в нашем случае, что
![]() .
Одновременно
из построения следует, что
.
Одновременно
из построения следует, что
![]() и
и
![]() .
.
5) Определение угловых ускорений звеньев. Измерив длины отрезков пb и κb найдем угловые ускорения звеньев по формулам
![]() и
и
![]() .
.
Из планов скоростей
и ускорений видим, что векторы скорости
![]() точки В
и ускорения
направлены в проти-воположные стороны.
Следовательно, звено О1В
движется
замедленно. Сравнивая направления
векторов скорости
точки В
и ускорения
направлены в проти-воположные стороны.
Следовательно, звено О1В
движется
замедленно. Сравнивая направления
векторов скорости
![]() и ускорения
,
видим, что они
тоже направлены
в противоположные стороны.
Следовательно
звено АВСD
тоже движется
замедленно.
и ускорения
,
видим, что они
тоже направлены
в противоположные стороны.
Следовательно
звено АВСD
тоже движется
замедленно.
6)
Определение
![]() .
Используя свойство подобия фигур АВС
на механизме и авс
плане ускорений определим положе-ние
точки с
на плане ускорений из условия
пропорциональ-ности
.
Используя свойство подобия фигур АВС
на механизме и авс
плане ускорений определим положе-ние
точки с
на плане ускорений из условия
пропорциональ-ности
![]() .
.
Отложим от точки
b
отрезок
![]() .
Тогда, соеди-нив точку с
с центром плана
ускорений π,
получим ускорение
.
Тогда, соеди-нив точку с
с центром плана
ускорений π,
получим ускорение
![]() .
Модуль ускорения точки С
определим
с учетом масштаба ускорения, измерив
отрезок πс,
получим
.
.
Модуль ускорения точки С
определим
с учетом масштаба ускорения, измерив
отрезок πс,
получим
.
7) Определение
![]() .
Используя
свойство равенства углов подобных
фигур, на плане ускорений построим
фигуру аbсd
подобную
фигуре АВСD
механизма. Соединив точку d
с центром плана ускорений π,
получим ускорение. Модуль ускорения
точки D определим
по формуле
.
Используя
свойство равенства углов подобных
фигур, на плане ускорений построим
фигуру аbсd
подобную
фигуре АВСD
механизма. Соединив точку d
с центром плана ускорений π,
получим ускорение. Модуль ускорения
точки D определим
по формуле
![]() .
.