

3.4.3. Независимость угловой скорости фигуры от выбора полюса
Основными кинематическими характеристиками
рас-сматриваемого ППД являются скорость
![]() и ускорение
и ускорение
![]() поступательного движения, а также
угловая скорость ω и угловое ускорение
ε вращательного движения тела
вокруг полюса.
поступательного движения, а также
угловая скорость ω и угловое ускорение
ε вращательного движения тела
вокруг полюса.
Очевидно, что характеристики поступательной
части плоского движения, такие как
перемещение, скорость и ускорение
зависят от выбора полюса, а за полюс
можно брать любую точку тела. Например,
если за полюс взять точку С, то
характеристики поступательного движения
будут соответственно
![]() .
Если бы
.
Если бы
![]() а
а
![]() ,
то движение тела было бы поступательным,
так как при равенстве в каждый момент
времени перемеще-ний, скоростей и
ускорений хотя бы двух точек плоской
фигуры, последняя совершала бы
поступательное движение.
,
то движение тела было бы поступательным,
так как при равенстве в каждый момент
времени перемеще-ний, скоростей и
ускорений хотя бы двух точек плоской
фигуры, последняя совершала бы
поступательное движение.
Характеристики вращательной части плоского движе-ния, то есть угловая скорость ω и ускорение ε, остаются неизменными, независящими от выбора полюса. Докажем это.
Возьмем в сечении S (рис. 3.15) две
параллельные прямые АВ и СД.
Если за полюс взять точку А, то угол
поворота отрезка АВ относительно
оси Ох равен φ1. Если за
полюс взять точку С, то угол поворота
отрезка СД бу-дет равен φ2.
А так как произвольно выбранные отрезки
АВ и СД параллельны, то
![]() ,
то есть законы вращения вокруг полюсов
одинаковы, отсюда:
,
то есть законы вращения вокруг полюсов
одинаковы, отсюда:
![]()
 ,
или ω1 = ω2 = ω;
,
или ω1 = ω2 = ω;
![]() ,
или
,
или
![]() ,
что
,
что
Рис. 3.15 и требовалось доказать.
3.4.4. Определение траектории точек тела
Рассмотрим точку М тела, положение
которой в сечении S определяется
расстоянием АМ от полюса А и
углом
![]() (рис. 3.16). Если движение тела задано
уравнениями (3.24), то координаты х и
у точки М в осях Охуz будут:
(рис. 3.16). Если движение тела задано
уравнениями (3.24), то координаты х и
у точки М в осях Охуz будут:
![]() ,
(3.25)
,
(3.25)
г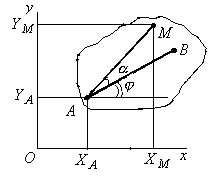 де
ХА, YА,
φ – известные по уравнениям (3.24)
функции времени t.
де
ХА, YА,
φ – известные по уравнениям (3.24)
функции времени t.
Равенства (3.25) опреде-ляют закон движения точки М в плоскости Оху, дают одновременно уравнение траектории этой точки в параметрическом виде.
Рис. 3.16 Уравнение траектории в
обычном виде можно получить из (3.25) решив их сов-местно, исключив из системы уравнений время t.
3.4.5. Определение скоростей точек тела
Угловую скорость и угловое ускорение
при плоском движении твердого тела
можно представить в виде векторов,
расположенных вдоль подвижной оси,
перпендикулярной плоскости
движения и проходящей через выбранный
полюс (рис. 3.17). Вектор угловой скорости
![]() направлен
в ту сторону, откуда мы видим вращение
тела, происходящим против хода часовой
стрелки. Его модуль равен
направлен
в ту сторону, откуда мы видим вращение
тела, происходящим против хода часовой
стрелки. Его модуль равен
![]()
![]()
 .
(3.26)
.
(3.26)
При ускоренном
вращении вектор углового ускорения
![]() направлен в ту же сторону, что и вектор
угловой скорости
,
при замедленном - в противоположную.
Его модуль равен
направлен в ту же сторону, что и вектор
угловой скорости
,
при замедленном - в противоположную.
Его модуль равен
Рис.
3.17
![]() .
(3.27)
.
(3.27)
Перейдем теперь к изучению движения отдельных точек тела, то есть к изучению их траекторий, скоростей и ускорений.
Дифференцированием по времени уравнений плоскопараллельного движения (3.24) определяются только скорость полюса А и угловая скорость тела:
![]() ,
,
![]() ,
,
![]() ,
,![]() .
(3.28)
.
(3.28)
Чтобы при помощи этих уравнений определить ско-рость любой точки плоской фигуры, рассмотрим движе-ние ее произвольной точки В (рис. 3.18), положение которой в каждый момент времени по отношению к неподвижной системе отсчета Oxyz определяется радиус-вектором
![]() ,
(3.29)
,
(3.29)
г де
де
![]() - радиус-вектор полюса А, а
- радиус-вектор полюса А, а
![]() - радиус-вектор точки В,
- радиус-вектор точки В,
![]() -
радиус-вектор точки В относительно
полюса А. Вектор
является вектором постоянного модуля,
так как расстояние между точками А
и В твердого тела в процессе движения
остается неизмен-ным; этот вектор
вращается вместе с телом вокруг подвижной
оси, перпен-дикулярной плоскости движения
фигуры, с угловой скоростью ω.
-
радиус-вектор точки В относительно
полюса А. Вектор
является вектором постоянного модуля,
так как расстояние между точками А
и В твердого тела в процессе движения
остается неизмен-ным; этот вектор
вращается вместе с телом вокруг подвижной
оси, перпен-дикулярной плоскости движения
фигуры, с угловой скоростью ω.
Взяв производную по времени
Рис. 3.18 от последнего равенства, получим
![]() .
.
В этом выражении
![]() -
скорость полюса А. Производная
вектора постоянного модуля по времени
определяется по формуле Эйлера и
обозначается как
-
скорость полюса А. Производная
вектора постоянного модуля по времени
определяется по формуле Эйлера и
обозначается как
![]() :
:
![]() .
.
В соответствии с правилом векторного произведения вектор лежит в плоскости фигуры. Он перпендикуля-рен отрезку АВ и направлен в сторону вращения плоской фигуры. Модуль вектора равен
![]() .
.
Вектор определяет скорость точки В, которую эта точка имела бы при неподвижном полюсе А, то есть при вращении фигуры вокруг неподвижной оси с угловой скоростью ω. Окончательно, для определения скорости произвольной точки плоской фигуры получаем формулу
![]() , (3.30)
, (3.30)
где
![]() ,
,
![]() (3.31)
(3.31)
Таким образом, мы доказали теорему о сложении скоростей: скорость любой точки тела при его плоско-параллельном движении равна векторной сумме скоро-сти полюса и скорости данной точки при ее вращении вместе с телом вокруг полюса.
Н аправление
и величина
аправление
и величина
![]() находится по правилу параллело-граммма
(рис. 3.19). Для этого по формулам (3.28)
находят скорость полюса
и угловую скорость тела ω. Затем по
формулам (3.31) опре-
находится по правилу параллело-граммма
(рис. 3.19). Для этого по формулам (3.28)
находят скорость полюса
и угловую скорость тела ω. Затем по
формулам (3.31) опре-
Рис. 3.19 деляют скорость
.
Откладывая из точки В по величине
и направлению векторы скорос-тей
и
строят параллелограмм для определения
величины и направления искомой скорости
![]() .
.
Следствие 1. Проекции скоростей двух точек на прямую, соединяющую эти точки равны друг другу.
Докажем это. Рассмотрим какие-нибудь две точки А и М твердого тела его в ППД (рис. 3.20, а).

Рис. 3.20
Принимая точку А за полюс и используя
теорему о сложении скоростей (3.30),
запишем:
![]() .
Проектируя это уравнение на ось (рис.
3.20, а), получим
.
Проектируя это уравнение на ось (рис.
3.20, а), получим
![]() ,
так как
,
так как
![]() .
Этот результат позволяет легко находить
скорость точки тела, если известны
направление движения этой точки и
величина и направление скорости
какой-нибудь точки того же тела.
.
Этот результат позволяет легко находить
скорость точки тела, если известны
направление движения этой точки и
величина и направление скорости
какой-нибудь точки того же тела.
Следствие 2. Концы векторов скоростей точек неизменяемого отрезка лежат на одной прямой и делят эту прямую на части, пропорциональные расстояниям между соответствующими точками отрезка (рис. 3.20, б, в). Примем без доказательства (см. [1.-5]).