

3.4.6. План скоростей и его свойства
Скорости точек тела можно определить графически, построением плана скоростей. Планом скоростей называется диаграмма, на которой от некоторого центра О отложены векторы скоростей всех точек тела.
Пусть
известны
,
,
![]() - скорости точек
А, В, С
тела (рис.
3.21, а).
Тогда соответствующий план скоростей
получим, отложив от некоторого центра
О
(рис. 3.21, б)
в выбранном масштабе
- скорости точек
А, В, С
тела (рис.
3.21, а).
Тогда соответствующий план скоростей
получим, отложив от некоторого центра
О
(рис. 3.21, б)
в выбранном масштабе
![]() отрезки
отрезки
![]() ,
,
![]() ,
,
![]() .
.
Точка О, из которой исходит пучок абсолютных скоростей, называется полюсом плана скоростей.
Установим свойства и правила построения плана скоростей. По теореме о сложении скоростей (3.30) и (3.31) имеем:
, (а)
г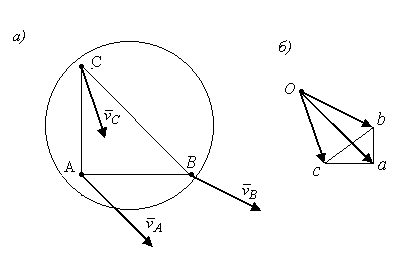 де
,
.
де
,
.
Рис. 3.21
Но из треугольника аОb имеем,
![]()
или
![]() .
(б)
.
(б)
Сравнивая равенства (а) и (б) устанавливаем,
что
![]() ;
аналогично найдем
;
аналогично найдем
![]() ;
;
![]() и т.д.
и т.д.
Тогда по формулам (3.31) имеем:
![]() и
и
![]() ,
,
![]() и
и
![]() ,
,
![]() и
и
![]() .
.
Откуда
![]() (3.32)
(3.32)
Таким образом:
Каждый из отрезков, соединяющих вершины плана скоростей, геометрически равен вращательной скорости соответствующей точки фигуры вокруг другой точки как вокруг полюса и по модулю пропорциональны этим отрезкам
 .
.Отрезки, соединяющие концы векторов на плане скоростей, перпендикулярны отрезкам, соединяющим соответствующие точки тела, и по модулю пропорциональны этим отрезкам
 ,
,
 .
.Фигуры, обозначенные на плане скоростей и в сечении (S) тела одинаковыми буквами будут при этом подобны и повернуты относительно другой на 90˚.
План скоростей плоского механизма строится как совокупность планов скоростей отдельных его звеньев, причем все векторы скоростей откладываются от общего полюса О в одном масштабе.
Планом скоростей механизма называют графичес-кое построение, представляющее собой плоский пучок, лучи которого изображают абсолютные скорости то-чек звена, а отрезки, соединяющие концы лучей, изобра-жают относительные скорости соответствующих точек в данном положении звена.
Отметим основные свойства плана скоростей меха-низма:
векторы абсолютных скоростей точек выходят из полюса плана скоростей;
векторы относительных скоростей точек одного и того же звена изображаются отрезками, соединяющими концы векторов абсолютных скоростей;
отрезки прямых линий (треугольники или много-угольники), соединяющие точки одного звена на плане механизма, и отрезки прямых линий, соединяющих кон-цы векторов скоростей этих точек на плане скоростей, образуют подобные и сходственно расположенные фигуры;
фигура на плане скоростей повернута относитель-но подобной фигуры механизма на 90° по направлению его угловой скорости;
порядок букв при обходе в одном направлении контуров неизменяемой фигуры и ее плана скоростей одинаков. При этом обход надо начинать с одной и той же буквы.
Эти свойства дают возможность определить ско-рость любой точки звена, если известны скорости двух точек этого звена. Рассмотрим пример построения плана скоростей.
Пример: Построить план скоростей механизма (рис. 3.22, а) для положения, изображенного на чертеже, если скорость конца кривошипа ОА известна. Кривошип О1В соединен шарниром с серединой шатуна АС.
Решение:
1)
Выбрав масштаб
длин
![]() (например: в 1 см
на рисунке изображено 0,1
м размера
звена), изображаем
механизм в дан-ном положении (рис. 3.22,
а).
(например: в 1 см
на рисунке изображено 0,1
м размера
звена), изображаем
механизм в дан-ном положении (рис. 3.22,
а).
2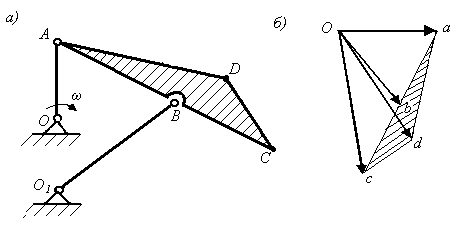 )
Определение
скорости
.
Выбираем масштаб скорос-тей
)
Определение
скорости
.
Выбираем масштаб скорос-тей
![]() (например, 1 см
на плане изображает скорость
0,5 м/с)
и откладываем в этом масштабе от
некоторого центра О
вектор
,
направленный
перпендикулярно к
ОА
(рис. 3.22, б). Из
того же центра проводим прямую
(например, 1 см
на плане изображает скорость
0,5 м/с)
и откладываем в этом масштабе от
некоторого центра О
вектор
,
направленный
перпендикулярно к
ОА
(рис. 3.22, б). Из
того же центра проводим прямую
![]() (скорость точки
(скорость точки
![]() ),
а из точки а
прямую
),
а из точки а
прямую
![]() до пересечения с линией Оb.
Тогда согласно (б)
точка b
и даст
конец
вектора
.
до пересечения с линией Оb.
Тогда согласно (б)
точка b
и даст
конец
вектора
.
Рис. 3.22
3)
Определение
скорости
![]() .
Точка С
механизма лежит на прямой АВС.
Следовательно, по свойству подобия
точка с
на плане
скоростей должна лежать на прямой аbс.
При этом согласно (3.32)
.
Точка С
механизма лежит на прямой АВС.
Следовательно, по свойству подобия
точка с
на плане
скоростей должна лежать на прямой аbс.
При этом согласно (3.32)
![]() .
.
Так как АВ = ВС, то откладывая на продолжении аb отре-зок bс = аb, находим точку с. Соединив точки О и с, получим вектор .
4) Определение
скорости
![]() .
Из точки а
проводим пря-мую перпендикулярную АD,
а из точки с
– прямую перпенди-кулярную СD.
Пересечение
этих перпендикуляров дает, согла-сно
(б)
точку d.
Соединяя точки
О
и d,
находим вектор
.
Из точки а
проводим пря-мую перпендикулярную АD,
а из точки с
– прямую перпенди-кулярную СD.
Пересечение
этих перпендикуляров дает, согла-сно
(б)
точку d.
Соединяя точки
О
и d,
находим вектор
![]() .
.