

Задачи Возможные перемещения системы
3.8.1. Определить отношение между возможными перемещениями δsА точки А кривошипа ОА и δsC точки С ползуна (рис. 558), если длины OВ =АВ. (2)


Рис. 558 Рис. 559
3
 .8.2.
Определить отношение между возможными
перемещениями δsA
и δsB
точек А и В шатуна АВ (рис.
559) механизма эллипсографа. (0,347)
.8.2.
Определить отношение между возможными
перемещениями δsA
и δsB
точек А и В шатуна АВ (рис.
559) механизма эллипсографа. (0,347)
Рис. 560 Рис. 561 Рис. 562
3.8.3. Определить отношение между возможными перемещениями δsA точки А кривошипа 2 (рис. 560) и δsC точки С толкателя 1. (1,73)
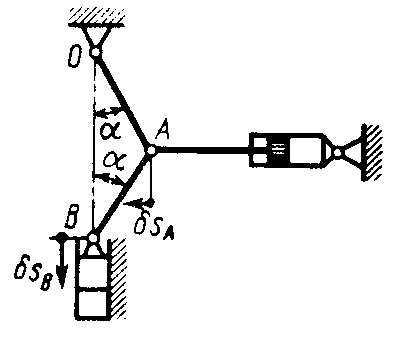
3.8.4. Определить отношение между возможными перемещениями δsA и δsB точек А и В шатуна механизма пресса (рис. 561), если длины ОА = АВ и угол α =30°. (1,73)
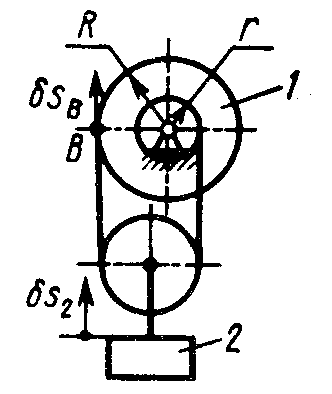
3.8.5. Определить отношение между возможными перемещениями δsB точки В барабана 1 и δs2 груза 2 дифференциального ворота (рис. 562), если радиусы
R = 2r = 20 см. (4)
Принцип возможных перемещений
3.8.6. Зубчатая передача состоит из двух колес с числом зубьев z2 = 2z1. На колесо 1 действует пара сил с моментом М1= 10 Н·м. Определить в случае равновесия передачи модуль момента пары сил, действующей на колесо 2. (20)
3 .8.7.
Определить момент М пары сил (рис.
563), который необходимо приложить к
барабану 2 радиуса r
= 20 см для равномерного подъема груза 1
весом 200 Н. (20)
.8.7.
Определить момент М пары сил (рис.
563), который необходимо приложить к
барабану 2 радиуса r
= 20 см для равномерного подъема груза 1
весом 200 Н. (20)

Рис. 563 Рис. 564
3.8.8. Определить усилие в стержне АС плоской фермы (рис. 564), если к узлу В приложена горизонтальная сила F =6·103 Н. (3. 103)
3.8.9. Механизм
(рис. 565), состоящий из зубчатых колес 1,
2 с числом зубьев z2
= 2z1 и барабана
3, жестко скрепленного с колесом 2,
равномерно перемещает груз 4 весом
4·103 Н. Определить момент М
пары сил, если коэффициент трения
скольжения груза f =
0,2 и радиус б арабана
r = 10см. (40)
арабана
r = 10см. (40)

Рис. 565 Рис. 566
3.8.10. К зубчатому колесу 1 (рис. 566) приложена пара сил с моментом M1 = 40 Н·м. Определить момент М пары сил, который необходимо приложить к кривошипу ОА, для того чтобы механизм находился в равновесии, если радиусы r1 = r2. (80)
3.9. Общее уравнение динамики системы
При идеальных голономных удерживающих связях, наложенных на систему, имеет место общее уравнение динамики:
![]() (79)
(79)
или
![]() (80)
(80)
уравнение (79) можно переписать в виде
![]() (81)
(81)
т. е. при движении системы с идеальными голономными удерживающими связями сумма элементарных работ активных сил и сил инерции равна нулю на всяком возможном перемещении системы из любого ее положения.
Работу сил инерции твердого тела, вращающегося вокруг неподвижной оси, при элементарном повороте δφ вокруг оси вращения определяют формулой
![]() ,
(82)
,
(82)
где Jz - момент инерции тела относительно оси враще-ния. В случае наличия сил трения их нужно причислять к активным силам.
П ример
1. (рис. 567).
Центробежный
тахометр состоит из двух точечных
масс А
и В,
соединенных между собой стерж-нем, муфты
С,
скрепленной с массой А с помощью
стержня АС
и спиральной пружины. Стержень АВ
может поворачивать-ся вокруг оси О,
перпендикулярной оси тахометра O1O2.
При отсутствии вращения стержень АВ
образует с осью тахометра угол φ0.
Определить зависимость угловой
скорости тахометра от угла φ,
если масса тА
= тВ
= т,
а масса муфты равна m1.
Жесткость спиральной пружины принять
равной с
и считать
ример
1. (рис. 567).
Центробежный
тахометр состоит из двух точечных
масс А
и В,
соединенных между собой стерж-нем, муфты
С,
скрепленной с массой А с помощью
стержня АС
и спиральной пружины. Стержень АВ
может поворачивать-ся вокруг оси О,
перпендикулярной оси тахометра O1O2.
При отсутствии вращения стержень АВ
образует с осью тахометра угол φ0.
Определить зависимость угловой
скорости тахометра от угла φ,
если масса тА
= тВ
= т,
а масса муфты равна m1.
Жесткость спиральной пружины принять
равной с
и считать
ОА = OВ = АС = l. Массой стержней и трением пренебречь.
Решение. Система состоит из точечных масс A и В и муф-ты С. Активными силами являются веса и упругие силы
пружины, момент последних Mупр = C(φ – φ0). Приложим условно к точкам системы силы инерции:
![]()