

3.6. Теорема об изменении кинетической энергии
3.6.1. Работа и мощность силы
Элементарную работу силы, приложенной к материальной точке, на бесконечно малом перемещении определяют формулой
![]() .
.
Работа силы на конечном перемещении материаль-ной точки
![]() .
.
Работа постоянной силы на прямолинейном участке пути s
![]() .
.
Работа силы тяжести любой системы
![]() ,
,
где Р – сила тяжести
системы;
![]() и
и
![]() -
координаты центра тяжести в начальном
и конечном положениях системы.
-
координаты центра тяжести в начальном
и конечном положениях системы.
Работа упругой силы Fx = - cx при прямолинейном перемещении точки
![]() .
.
Элементарную работу сил, приложенных к твердому телу, перемещающемуся произвольно, определяют по формуле
![]() ,
,
где О – произвольная точка тела.
Работа сил, приложенных к твердому телу вращающемуся вокруг оси,
 ,
,
где Mz – главный момент всех сил относительно оси вращения Оz.
Сумма работ всех внутренних сил в твердом теле равна нулю.
Мощность силы, приложенной в точке,
![]() .
.
Мощность сил, приложенных к твердому телу,
![]() .
.
Для сил, приложенных к твердому телу, вращающе-муся вокруг неподвижной оси,
Р = Мzω.
Задачи
3.6.1. Ненагруженную пружину, коэффициент жест-кости которой с = 100 Н/м, растянули на 0,02 м. Опреде-лить работу силы упругости пружины. (-0,02)
3.6.2. На тело (рис. 464) действует постоянная по
направлению сила F = 4х3. Определить работу этой силы при перемещении тела из положения с координатой х = 0 в положение с координатой х = 1м. (0,866)
3.6.3. Материальная точка М массой m (рис. 465) движется прямолинейно по горизонтальной плоскости по закону s = t 4 под действием силы F = 12 t2. Определить работу этой силы при перемещении ее точки
п риложения
из начального положения, где s
= 0, в положение, где s = 4 м. (64)
риложения
из начального положения, где s
= 0, в положение, где s = 4 м. (64)


Рис. 464 Рис. 465 Рис. 466
3.6.4. Моторная лодка движется по реке со скоростью 8 м/с. Сила тяги двигателя равна 3500 Н. Определить в кВт мощность силы тяги двигателя. (28)
3.6.5. Тело скользит вниз по шероховатой плоскости (рис.466). Зависит ли работа силы трения скольжения на расстоянии s от изменения угла наклона плоскости α? (Да)
3.6.6. Однородный цилиндр массой 40 кг катится прямолинейно без скольжения по горизонтальной плоскости с угловой скоростью ω= 4 рад/с. Коэффициент трения качения δ = 0,01 м. Определить мощность сил сопротивления качению.(-15,7)
3.6.2. Кинетическая энергия
Кинетическая
энергия материальной точки
![]() .
.
Кинетическая
энергия системы п материальных
точек
![]() .
.
Кинетическая энергия твердого тела при поступа-тельном движении
![]() ,
,
где М =![]() -
масса тела.
-
масса тела.
Кинетическая энергия твердого тела при его вращательном движении
![]() ,
,
где Jz – момент инерции тела относительно оси вращения, ω – угловая скорость тела.
Для общего случая движения твердого тела (в том числе и для плоского движения)
![]() ,
,
где JC – момент инерции тела относительно мгновенной оси, проходящей через центр тяжести, ω – мгновенная угловая скорость.
Задачи
3.6.7. Частота вращения рабочего колеса вентилятора равна 90 об/мин. Определить кинетическую энергию колеса, если его момент инерции относительно оси вращения равен 2,2 кг·м2. (97,7)
3 .6.8.
Для указанного положения механизма
(рис. 467) определить кинетическую энергию
шатуна АВ массой т = 1 кг, если
кривошип ОА длиной 0,5 м вращается
вокруг оси О с угловой скоростью
ω = 2 рад/с. (0,5)
.6.8.
Для указанного положения механизма
(рис. 467) определить кинетическую энергию
шатуна АВ массой т = 1 кг, если
кривошип ОА длиной 0,5 м вращается
вокруг оси О с угловой скоростью
ω = 2 рад/с. (0,5)

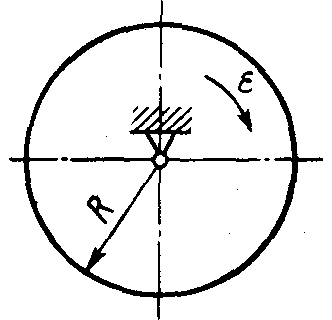
Рис. 467 Рис. 468 Рис. 469
3.6.9. Однородный диск (рис. 468) массой т = 30 кг радиуса R = 1 м начинает вращаться из состояния покоя равноускоренно с постоянным угловым ускорением
ε = 2 рад/с2. Определить кинетическую энергию диска в момент времени t = 2 с после начала движения. (120)
3.6.10. Однородный стержень (рис. 469), масса которого т = 3 кг и длина АВ = 1 м, вращается вокруг оси Oz по закону φ = 2 t3. Определить кинетическую энергию стержня в момент времени t = 1 с. (18)
3.6.11. Однородная прямоугольная пластина (рис. 470) массой т = 18 кг вращается вокруг оси АВ с



Рис. 470 Рис. 471 Рис. 472
угловой скоростью ω = 4 рад/с. Определить кинети-ческую энергию пластины, если длина b = 1 м. (48)
3.6.12. Диск массой т = 2 кг радиуса r = 1 м (рис. 471) катится по плоскости, его момент инерции относительно оси, проходящей через центр С перпен-дикулярно плоскости рисунка, JC = 2 кг·м2. Определить кинетическую энергию диска в момент времени, когда скорость его центра vC = 1 м/с. (2)
3
 .6.13.
Однородный цилиндр 1 (рис. 472) массой
т = 16 кг катится без скольжения
по внутренней цилиндрической
поверхности 2. Определить кинетическую
энергию цилиндра в момент времени, когда
скорость его центра масс С равна 2
м/с. (48)
.6.13.
Однородный цилиндр 1 (рис. 472) массой
т = 16 кг катится без скольжения
по внутренней цилиндрической
поверхности 2. Определить кинетическую
энергию цилиндра в момент времени, когда
скорость его центра масс С равна 2
м/с. (48)

Рис. 473 Рис. 474 Рис. 475
3.6.14. Однородный стержень АВ (рис. 473) длиной 2 м и массой т = 6 кг при своем движении скользит конца-ми А и В по горизонтальной и вертикальной плоскостям. Определить кинетическую энергию стержня в момент времени, когда угол α = 45° и скорость точки А равна vA= 1 м/с. (2)
3.6.15. Прямой круговой конус (рис.474) катится без скольжения по горизонтальной плоскости, имея угловую скорость ω = 5 рад/с во вращательном движении вокруг мгновенной оси вращения. Момент инерции конуса относительно оси ОА равен 0,04 кг·м2. Определить кинетическую энергию конуса. (0,5)
3.6.16. Шар массой
т = 5 кг свободно движется в пространстве
(рис. 475); скорость vr
центра С шара равна 4 м/с, а его
угловая скорость
![]() вращения вокруг мгно-венной оси Cz
равна 10 рад/с. Определить кинетическую
энергию шара, если его момент инерции
относительно оси Cz равен 0,5 кг·м2.
(65)
вращения вокруг мгно-венной оси Cz
равна 10 рад/с. Определить кинетическую
энергию шара, если его момент инерции
относительно оси Cz равен 0,5 кг·м2.
(65)
3.6.17. Чему равна кинетическая энергия зубчатой передачи двух цилиндрических колес с числом зубьев z2 = 2z1, если их момент инерции относительно осей вращения J2 = 2J1= 2 кг·м2, а угловая скорость колеса 1 равна 10 рад/с. (75)
3 .6.18.
Четыре груза массой т = 1 кг каждый
(рис. 476), соединенные гибкой нитью,
переброшенной через неподвижный
невесомый блок, движутся согласно закону
s = 1,5t2.
Определить кинетическую энергию
системы грузов в момент времени t
= 2 с. (72)
.6.18.
Четыре груза массой т = 1 кг каждый
(рис. 476), соединенные гибкой нитью,
переброшенной через неподвижный
невесомый блок, движутся согласно закону
s = 1,5t2.
Определить кинетическую энергию
системы грузов в момент времени t
= 2 с. (72)


Рис. 476 Рис. 477 Рис. 478
3.6.19. Определить кинетическую энергию системы (рис. 477), состоящей из двух одинаковых зубчатых колес массой т = 1 кг каждый, вращающихся с угловой скоростью ω = 10 рад/с. Радиус инерции каждого колеса относительно оси вращения равен 0,2 м. (4)
3.6.20. Груз массой т = 4 кг, опускаясь вниз (рис. 478), приводит с помощью нити во вращение цилиндр радиуса R = 0,4 м. Момент инерции цилиндра относи-тельно оси вращения J = 0,2 кг·м2. Определить кинети-ческую энергию системы тел в момент времени, когда скорость груза v = 2 м/с. (10,5)
3 .6.21.
Кривошип 1 (рис. 479), вращаясь с угловой
скоростью ω = 10 рад/с, приводит в
движение колесо 2 массой 1 кг, которое
можно считать однородным диском. Момент
инерции криво шипа относительно
оси враще-ния равен 0,1 кг·м2.
Определить кине-
.6.21.
Кривошип 1 (рис. 479), вращаясь с угловой
скоростью ω = 10 рад/с, приводит в
движение колесо 2 массой 1 кг, которое
можно считать однородным диском. Момент
инерции криво шипа относительно
оси враще-ния равен 0,1 кг·м2.
Определить кине-
Рис. 479 тическую энергию механизма, если
радиус R = 3r = 0,6 м. (17)
3.6.3. Теорема об изменении кинетической энергии механической системы
С помощью теоремы об изменении кинетической энергии решается как прямая, так и обратная задачи динамики. В дифференциальной форме теорема применяется для того, чтобы найти по заданным силам ускорения точек системы (или наоборот), т. е. чтобы составить дифференциальные уравнения движения системы и интегрированием этих уравнений найти законы изменения скоростей и перемещений точек системы. Интегральная форма теоремы используется в тех случаях, когда при конечном перемещении системы заданы три из следующих четырех величин: скорости, перемещения, силы, массы, а четвертая подлежит определению. Теорема чаще всего применяется для исследования движения механических систем с одной степенью свободы, т. е. систем, положение которых определяется одной координатой (линейной или угловой). Поэтому мы будем рассматривать только такие системы.
При решении задач с использованием теоремы в дифференциальной форме рекомендуется следующий порядок действий.
1. Выбрать координату, определяющую положение системы. Как правило, это величина, закон изменения которой (или ее производной) требуется найти. Начало отсчета данной координаты выбирается или в начальном положении системы, или в положении ее статического равновесия. Определить начальные значения координаты и ее производной по времени. Если в задаче требуется найти только ускорение, то этот пункт становится излишним.
2. Изобразить
систему в текущий момент временя, т.
е. при t > 0, дав
ей смещение в сторону возрастания
выбранной координаты. Построить все
приложенные к системе внешние и внутренние
силы (в случае неизменяемой системы
или системы твердых тел, соединенных
идеальными связями, только внешние
силы, так как в этом случае
![]() =
0).
=
0).
3. Записать теорему об изменении кинетической энергии в дифференциальной форме:
dT/dt
=
![]() +
.
+
.
4. Подсчитать кинетическую энергию в текущем положении системы, выразив ее как функцию скорости звена, движение которого требуется определить (или задано).
5. Подсчитать сумму мощностей внешних и внутренних сил (или сумму их элементарных работ), выразив ее как функцию скорости звена, движение которого определяется (или задано).
6. Подставить полученные значения кинетической энергии и суммы мощностей в уравнение теоремы, получив таким образом дифференциальное уравнение движения системы. Если решается прямая задача, то из данного уравнения найти искомую силу.
7. Проинтегрировать полученное уравнение, используя начальные условия, и найти искомые величины.
Пример 1. Груз А массой m1 = 1,02 кг опускается по шероховатой наклонной плоскости (коэффициент трения k = 0,2), составляющей с горизонтом угол α = 45°. К грузу А прикреплена невесомая и нерастяжимая нить, перекинутая через блок В и намотанная на однородный круглый цилиндр D массой т2 = 2,04 кг и радиусом r = 0,4 м, который катится по горизонтальной плоскости без скольжения (рис. 480, а). Масса блока т3 = 0,51 кг, его радиус r1 = 0,1 м, а его радиус инерции относительно оси вращения ρ = 0,08 м. Нить по блоку В и цилиндру D не скользит; трением в оси блока и трением качения цилиндра о плоскость можно пренебречь. Найти угловое ускорение цилиндра D.
Рис. 480

Решение. Поскольку требуется найти ускорение, для решения задачи применим теорему об изменении кинетической энергии в дифференциальной форме:
![]()
Изобразим
систему вместе с действующими на нее
внешними силами: активными (![]() )
и реакциями связей (
)
и реакциями связей (![]() ).
Внутренние
силы не показываем, так как система
состоит из твердых тел, соединенных
идеальной связью (гибкой нерастяжимой
нитью), и поэтому
= 0.
Сила трения
F1
= fN1.
Чтобы найти нормальную реакцию N1,
рассмотрим движение груза А,
освободив его от связей и заменив их
реакциями
).
Внутренние
силы не показываем, так как система
состоит из твердых тел, соединенных
идеальной связью (гибкой нерастяжимой
нитью), и поэтому
= 0.
Сила трения
F1
= fN1.
Чтобы найти нормальную реакцию N1,
рассмотрим движение груза А,
освободив его от связей и заменив их
реакциями![]() ;
оси координат показаны на рис. 480,б.
Груз совершает поступательное
прямолинейное движение вдоль оси Ох,
поэтому дифференциальное уравнение
его движения в проекции на ось Оу
дает
;
оси координат показаны на рис. 480,б.
Груз совершает поступательное
прямолинейное движение вдоль оси Ох,
поэтому дифференциальное уравнение
его движения в проекции на ось Оу
дает
![]() ,
,
![]() =
- Pcos
α
+ N1
=
- Pcos
α
+ N1
откуда N1 = Pcos α. и, следовательно, F1 = f P cosα .
Рассматриваемая система состоит из трех тел, А, В и D, так что ее кинетическая энергия состоит из трех слагаемых;
Т = ТА + ТВ + ТD.
/r1. Тело А совершает поступательное движение, поэтому
![]() ;
;
блок В вращается вокруг неподвижной оси, поэтому
![]() ;
;
цилиндр D совершает плоскопараллельное движение, поэтому
![]()
Выразим скорости vA, ω1, vС через угловую скорость цилиндра ω, угловое ускорение которого требуется определить. Точка К цилиндра является его мгновенным центром скоростей, так что vC = ω2r, vE = ω2r2. Нить нерастяжима, т. е. vE = vA и не скользит по блоку, т. е.
ω1 = vE/r1 = 2ω2r2.
Выражение
кинетической энергии системы принимает
вид

Определим мощность внешних сил, приложенных к системе (как было указано выше, мощность внутренних сил равна нулю);
=
NP
+
![]() = PvA
sin α
– F1vA
=
= PvA
sin α
– F1vA
=
= m1g (sin α— f cos α) 2ω2r2.
Мощности
нормальной реакции
и силы
тяжести
![]() равны нулю, так как эти силы перпендикулярны
скоростям точек их приложения:
равны нулю, так как эти силы перпендикулярны
скоростям точек их приложения:
![]() ,
,
![]() ;
мощности реакции
и
силы тяжести
;
мощности реакции
и
силы тяжести
![]() равны
нулю, так как эти силы приложены в
неподвижной точке; мощности сил
и
равны
нулю, так как эти силы приложены в
неподвижной точке; мощности сил
и
![]() равны
нулю, так как они приложены в мгновенном
центре скоростей.
равны
нулю, так как они приложены в мгновенном
центре скоростей.
Подставим
полученные значения кинетической
энергии и мощностей в формулу теоремы
и определим искомое ускоре-ние
или
Сократив на 2ω2r2 и разделив обе части на коэффициент при ε2 = dω2/dt, получим
 рад/с2.
рад/с2.
Пример 2. Груз А массой m1 = 105 кг подвешен к подвижному однородному блоку В массой т2 = 10 кг. Блок и груз удерживаются от падения тросом, конец К которого закреплен неподвижно, а конец D соединен с пружиной DE жесткостью
с = 1470 Н/м (рис. 481); трос по блоку не скользит. Найти период свободных колебаний системы, а так же закон движе-ния груза А, если в начальный момент система находится в положении статического равновесия и груз А имеет скорость v = 14 см/с, направленную вертикально вниз.
Р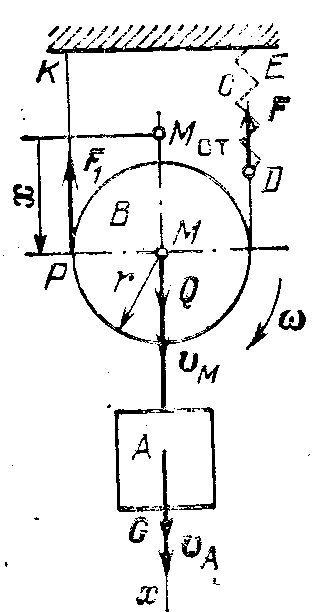 ешение.
Для определения движения груза А
надо составить дифференциальное
уравнение движения системы, и,
следовательно, предпочтительнее
воспользоваться теоремой об изменении
кинетической энергии в дифференциальной
форме:
ешение.
Для определения движения груза А
надо составить дифференциальное
уравнение движения системы, и,
следовательно, предпочтительнее
воспользоваться теоремой об изменении
кинетической энергии в дифференциальной
форме:
![]()
Так как система состоит из твердых тел, соединенных идеальным шарниром М и нерастяжимым тросом, весом которого пренебрегают, сумма мощностей внутренних сил равна нулю:
![]()
Рис. 481 Положение системы определяется положением груза А, и, следовательно, положением точки М центра блока. Предполагая, что точка М движется только по вертикали, определим ее положение координатой х, отсчитываемой от статического положения центра диска (точка Мст).
К
системе приложены внешние силы: силы
тяжести
![]() ,
и
реакции связей
,
и
реакции связей
![]() .
Упругая сила пружины равна F
= сδ,
где δ
— деформация пружины, которую мы
представим в виде суммы статической
деформации δст
и деформации хD,
происходящей за счет смещения точки
D
при движении системы, так что F
= с(δст
+ хD).
Когда система нахо-дится в положении
статического равновесия, упругая
сила пру-жины (Fст
= сδст)
удерживает в равновесии блок с грузом.
Из соображений симметрии следует, что
при этом
.
Упругая сила пружины равна F
= сδ,
где δ
— деформация пружины, которую мы
представим в виде суммы статической
деформации δст
и деформации хD,
происходящей за счет смещения точки
D
при движении системы, так что F
= с(δст
+ хD).
Когда система нахо-дится в положении
статического равновесия, упругая
сила пру-жины (Fст
= сδст)
удерживает в равновесии блок с грузом.
Из соображений симметрии следует, что
при этом
Fcт = F1ст = (G + Q)/2, или G + Q = 2сδст
Наша система состоит из груза А, движущегося поступа-тельно, и блока В, совершающего плоскопараллельное движение, и поэтому ее кинетическая энергия равна
![]() .
.
Так как точка Р блока является его мгновенным центром скоростей, то ω = vМ/r. Кроме того, vA = vМ = v, а момент инерции круглого однородного блока относительно центральной оси равен J = m2r2/2, следовательно,
![]() .
.
Определим сумму мощностей внешних сил;
= NG + NQ + + NF = Gv + Qv – FvD.
Мощность
реакции
![]() равна
нулю, так как эта сила приложена в
мгновенном центре скоростей блока.
Учитывая положение этой точки можно
записать, что vD
= 2vM
= 2v.
Но так как vD
= dxD/dt,
vM
= dxldt,
то dxD
= 2dx,
откуда, интегрируя, находим xD
= 2x.
Тогда
равна
нулю, так как эта сила приложена в
мгновенном центре скоростей блока.
Учитывая положение этой точки можно
записать, что vD
= 2vM
= 2v.
Но так как vD
= dxD/dt,
vM
= dxldt,
то dxD
= 2dx,
откуда, интегрируя, находим xD
= 2x.
Тогда
= (G + Q)v - c(δст+ хD)2v = v (G + Q - 2сδст - 4cх) = - 4cxv,
поскольку, как было установлено ранее, G + Q = 2сδст.
Подставляя значения кинетической энергии и суммы мощностей в формулу теоремы, получим дифференциальное уравнение движения системы:
![]() .
.
Сократим на v, перенесем все члены в левую часть и разде-лим на коэффициент при ускорении dv/dt = груза А; это даст
![]() .
.
Введем
обозначение
![]() (k
= 7 рад/с) и получим дифференциальное
уравнение свободных гармони-ческих
колебаний c
периодом Т
= 2π/k
= 0,9 с:
(k
= 7 рад/с) и получим дифференциальное
уравнение свободных гармони-ческих
колебаний c
периодом Т
= 2π/k
= 0,9 с:
+ k2x = 0,
решение которого имеет вид
х = С1 cos kt + С2 sin kt,
где
С1
и С2
найдем по начальным условиям (t
= 0, x0
= 0,
![]() ),
предварительно определив
),
предварительно определив
![]() :
:
= - C1k sin kt + C2k cos kt.
Тогда x0 = 0 = C1, v0 = C2k, откуда C1 = 0, С2 = v0/k = 2 см, и окончательно уравнение движения груза А запишется в виде
х = 2 sin 7t см..
При решении задач с помощью теоремы об изменении кинетической энергии в интегральной форме рекомендуется следующая последовательность действий.
1. Изобразить систему в начальном и конечном (или заданном) положении. Построить все приложенные к системе внешние и внутренние силы (в случае неизменяемой системы или системы, состоящей из твердых тел, соединенных идеальными связями,— только внешние силы, так как в этом случае
2. Записать теорему
об изменении кинетической энергии
в интегральной форме: Т1 –
Т0 =
![]() .
.
3. Подсчитать кинетическую энергию системы в начальном и конечном положениях, выразив ее через скорость звена, движение которого требуется определить (или задано).
4. Подсчитать сумму работ внешних и внутренних сил на искомых (или заданных) перемещениях точек системы, выразив их через перемещение того звена, движение которого ищется (или задано).
5. Подставить полученные значения кинетической энергии и работ в формулу теоремы и найти искомую величину.
Пример 3. К барабану ворота радиусом r1и массой т1 приложен постоянный вращающий момент М. К концу троса, намотанного на барабан, прикреплена ось С колеса, масса которого равна m2. Колесо катится без скольжения вверх по наклонной плоскости, образующей угол α с горизонталью (рис. 482). Какую угловую скорость приобретет барабан, сделав п оборотов? Барабан и колесо считать однородными круглыми цилиндрами. В начальный момент система находилась в покое. Массой троса и трением в шарнирах пренебречь.
Р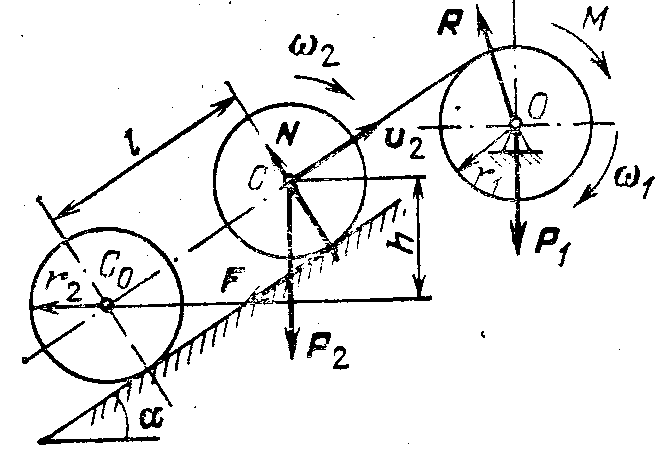 ешение.
Условием задачи заданы силы, действующие
на систему (
ешение.
Условием задачи заданы силы, действующие
на систему (![]() ,
,
![]() ),
массы входящих в нее тел и конечное
перемещение системы (угол поворота
барабана φ
= 2πп),
требуется же найти скорость в конце
перемещения. Поэтому для решения задачи
применим теорему об изменении кинетичес-кой
энергии системы в интегральной форме:
),
массы входящих в нее тел и конечное
перемещение системы (угол поворота
барабана φ
= 2πп),
требуется же найти скорость в конце
перемещения. Поэтому для решения задачи
применим теорему об изменении кинетичес-кой
энергии системы в интегральной форме:
Рис. 482 Т1 – Т0 = .
Изобразим
систему в. начальном и конечном положениях
вместе с приложенными к ней внешними
силами
![]() и моментом
М.
Внутренние силы не показываем, так как
система состоит из твердых тел,
соединенных идеальными связями и
и моментом
М.
Внутренние силы не показываем, так как
система состоит из твердых тел,
соединенных идеальными связями и
![]() =
0. В начальном положении система
неподвижна, следовательно, Т0
= 0. После п
поворотов барабана он приобрел угловую
скорость ω1
и скорость
центра колеса будет равна v2
= ω1r1,
а угловая
скорость колеса ω2
= v2/r1
= ω1r1/r2,
ибо точка
контакта колеса с наклонной плоскостью
является его мгновенным центром
скоростей. Барабан вращается вокруг
неподвижной оси О,
а колесо совершает плоскопараллельное
движение, и поэтому кинетическая энергия
системы T1
после п
оборотов барабана равна
=
0. В начальном положении система
неподвижна, следовательно, Т0
= 0. После п
поворотов барабана он приобрел угловую
скорость ω1
и скорость
центра колеса будет равна v2
= ω1r1,
а угловая
скорость колеса ω2
= v2/r1
= ω1r1/r2,
ибо точка
контакта колеса с наклонной плоскостью
является его мгновенным центром
скоростей. Барабан вращается вокруг
неподвижной оси О,
а колесо совершает плоскопараллельное
движение, и поэтому кинетическая энергия
системы T1
после п
оборотов барабана равна
![]() .
.
По
условию задачи моменты инерции барабана
и колеса равны соответственно
![]() и
и
![]() ,
поэтому
,
поэтому
 .
.
При повороте барабана па угол φ = 2πn центр колеса переместится вдоль наклонной плоскости на расстояние
l = φr1 = 2πпr1, т, е. поднимется на высоту h = l sin α =
= 2πnr1sin α . Определим работу внешних сил на этом конечном перемещении:
![]() .
.
Работы
сил
![]() и
равны нулю, так как они приложены в
неподвижной точке О.
Работы сил
и
равны
нулю, так как они приложены в мгновенном
центре скоростей колеса.
и
равны нулю, так как они приложены в
неподвижной точке О.
Работы сил
и
равны
нулю, так как они приложены в мгновенном
центре скоростей колеса.
Подставим
полученные значения Т
и
![]() в
формулу теоремы:
в
формулу теоремы:
![]()
и
определим ω1:
![]()