

Розділ 3 динаміка
Динаміка – це розділ теоретичної механіки, у якому вивчають закони руху матеріальних точок, систем матеріальних точок та абсолютно твердих тіл залежно від зовнішніх фізичних факторів, які так чи інакше впливають на рух.
Таким чином, динаміка вивчає найзагальніші закони механічних рухів, поєднуючи вивчення особливостей кінематичних властивостей руху з властивостями сил, які спричиняють цей рух, тобто вивчає внутрішній зв’язок між зовнішніми факторами (силами) і геометричними характеристиками рухів.
3.1. Динаміка матеріальної точки
3.1.1. Диференціальні рівняння руху вільної матеріальної точки. Основні задачі динаміки точки
Сили, прикладені до матеріальної точки, змінюють її рух. Кількісну залежність між характеристиками руху встановлює другий закон Ньютона.
Первісні уявлення про міру механічного руху належать Г.Галілею та Р.Декарту. Останній запровадив поняття кількості руху матеріальної точки або тіла, яке рухається поступально. Декарт вважав кількість руху скалярною величиною. Векторне числення було введене лише в ХІХ ст.
Кількість руху матеріальної точки
![]() ,
(3.1)
,
(3.1)
де:
![]() – коефіцієнт пропорційності, що залежить
від фізичних властивостей;
– коефіцієнт пропорційності, що залежить
від фізичних властивостей;
![]() – швидкість матеріальної точки.
– швидкість матеріальної точки.
Величну називають масою точки.
Поняття маси зосереджує в собі дві найзагальніші властивості фізичних тіл, які бере до уваги теоретична механіка.
Про першу – властивість інертності – йдеться у першому законі Ньютона. Друга – наявність тяжіння тіл (зокрема, вага тіл), тобто гравітаційна властивість. Указані характеристики тіл у теоретичній механіці відображають внутрішні матеріальні властивості фізичних тіл.
Отже, масою матеріальної точки називають міру гравітаційних та інертних властивостей фізичного тіла, яке зображає матеріальна точка.
Найпоширеніший
спосіб визначення маси з достатньою
для практики точністю полягає у зважуванні
тіл на терезах, оскільки встановлено,
що відношення ваги
![]() тіла до прискорення вільного падіння
не залежить від положення тіла над
поверхнею Землі (у межах змін висоти,
які малі порівняно з радіусом земної
кулі). Таким чином, маса
тіла до прискорення вільного падіння
не залежить від положення тіла над
поверхнею Землі (у межах змін висоти,
які малі порівняно з радіусом земної
кулі). Таким чином, маса
![]() .
(3.2)
.
(3.2)
Другий закон Ньютона: швидкість зміни кількості руху матеріальної точки дорівнює вектору сили, яка діє на точку.
Оскільки швидкість зміни математично визначається похідною за часом, то другий закон Ньютона математично записується у вигляді
![]() .
(3.3)
.
(3.3)
Якщо маса не залежить від часу, то (3.3) можна спростити:
![]() ,
,
або
![]() ,
(3.4)
,
(3.4)
де
![]() – прискорення точки.
– прискорення точки.
У
(3.3) і (3.4) вектор
![]() є рівнодійною силою, прикладеною до
точки, оскільки І.Ньютон у примітках до
другого закону вказав правило паралелограма
сил.
є рівнодійною силою, прикладеною до
точки, оскільки І.Ньютон у примітках до
другого закону вказав правило паралелограма
сил.
Отже, в основу класичної механіки покладено закони Ньютона, які грунтуються на його поглядах на час і простір.
1. “Абсолютний істинний математичний час сам по собі і самою своєю суттю, без усякого відношення до будь-чого зовнішнього, проходить рівномірно й інакше називається тривалістю….”*.
2. “Абсолютний простір у самій своїй суті, безвідносно до будь-чого зовнішнього, залишається завжди однаковим і нерухомим…”*.
Уявлення про абсолютний простір тісно пов’язане з припущенням про існування абсолютно нерухомої системи координат. Властивості простору визначаються геометрією Евкліда.
Сучасна релятивістська теорія спростовує погляди І.Ньютона на взаємну незалежність простору й часу.
Але кількісні відхилення законів сучасної механіки від законів класичної виявляються тільки при русі тіл поблизу великих мас (як маса Сонця) або при величезних швидкостях, близьких до швидкості світла, тобто у більшості технічних розрахунків закони класичної механіки справджуються з достатньою точністю. Тому класична механіка є фундаментом для теоретичних і практичних висновків сучасної науки й техніки.
Якщо сили, що діють на точку, не залежать від її прискорення, то виконується закон незалежності дії сил: кожна із сил, що діють на точку, надає їй прискорення, яке не залежать від дії інших сил.
Другий закон Ньютона називають основним законом динаміки, оскільки всі диференціальні рівняння руху і всі основні теореми динаміки випливають з виразу (3.3) або (3.4).
Відповідно до трьох способів визначення руху точки наведемо три способи складання диференціальних рівнянь руху.
1.
Векторний
спосіб.
При векторному способі визначення
прискорення
![]() точки, зауважимо, що сила, прикладена
до точки, може залежати від часу
точки, зауважимо, що сила, прикладена
до точки, може залежати від часу
![]() (наприклад, збурювальна сила), від
положення точки, яке визначається її
радіусом-вектором
(наприклад, збурювальна сила), від
положення точки, яке визначається її
радіусом-вектором
![]() (наприклад, пружна сила), і від швидкості
точки (наприклад, сила опору).
(наприклад, пружна сила), і від швидкості
точки (наприклад, сила опору).
На підставі (3.4) матимемо
![]() .
(3.5)
.
(3.5)
Диференціальне рівняння (3.5) є основним рівнянням динаміки точки у векторній формі.
2. Координатний спосіб. Спроектуємо обидві частини рівняння (3.5) на осі прямокутної декартової системи координат (рис. 3.1):
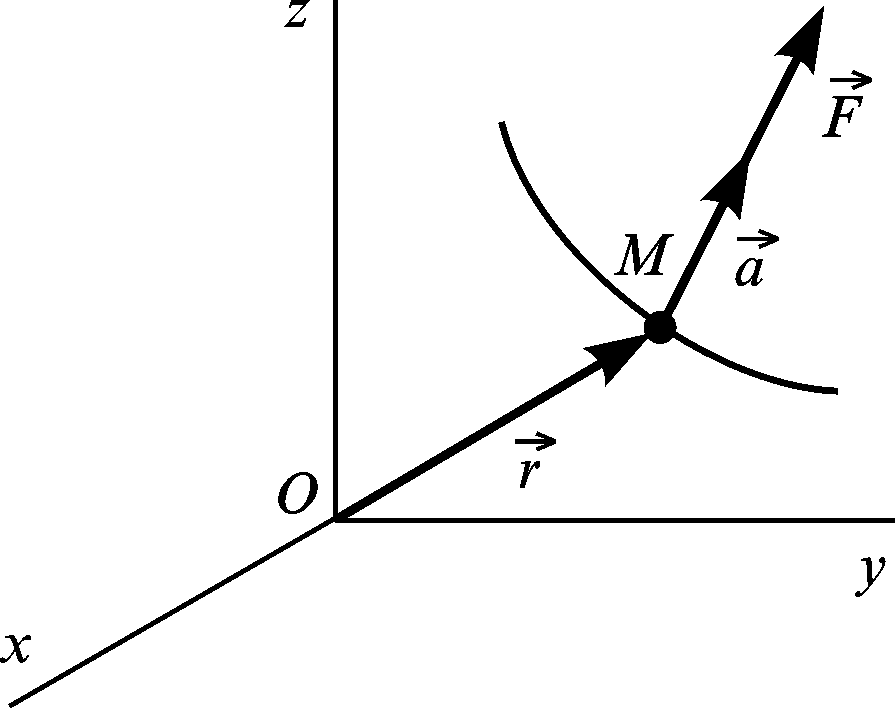
Рисунок 3.1
![]() (3.6)
(3.6)
де
![]() – проекції сили на координатні осі.
– проекції сили на координатні осі.
Система (3.6) має шостий порядок і є основними рівняннями динаміки точки в координатній формі.
3. Натуральний спосіб. Проектуючи ліву і праву частини (3.5) на осі натурального тригранника, дістаємо
![]() (3.7)
(3.7)
де
![]() – рівнодійна сил, прикладених до точки
(рис. 3.2). Підставивши в (3.7) вирази дотичного
і нормального прискорень, перше й друге
рівняння перепишемо відповідно так:
– рівнодійна сил, прикладених до точки
(рис. 3.2). Підставивши в (3.7) вирази дотичного
і нормального прискорень, перше й друге
рівняння перепишемо відповідно так:
![]() (3.8)
(3.8)
Рівняння (3.8) є диференціальними рівняннями руху точки в натуральній формі.
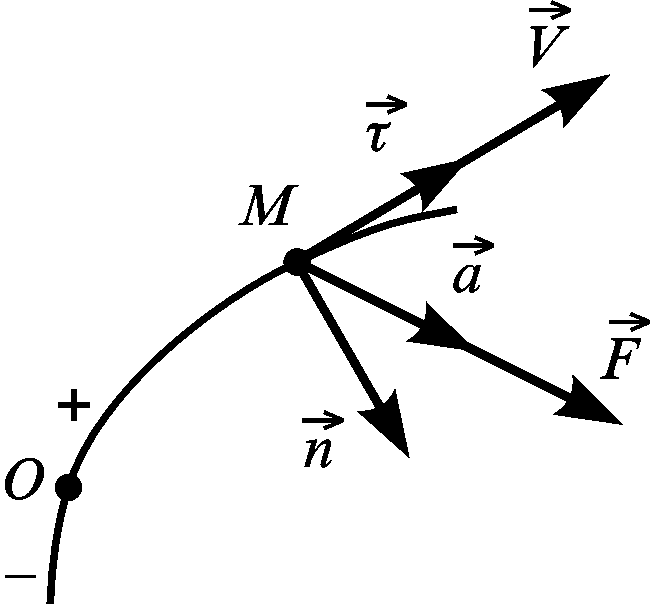
Рисунок 3.2
Як
випливає з (3.4), вектор рівнодійної сили
колінеарний вектору прискорення. Ця
сила лежить у стичній площині траєкторії,
тобто її проекція на бінормаль
![]() завжди дорівнює нулеві. Це виражено
третім рівнянням у (3.7).
завжди дорівнює нулеві. Це виражено
третім рівнянням у (3.7).
Рівняння (3.5) не застосовують для розв’язування задач, бо воно для цього мало придатне. Однак при доведеннях теорем завдяки компактності й наочності йому надають перевагу перед рівняннями (3.6) і (3.7).
Рівняння (3.7) або (3.8) застосовують, в основному, якщо відома траєкторія руху точки, тобто при дослідженні руху невільної точки.
Рівняння в координатній формі (3.6) можна застосувати як при доведеннях теорем, так і при розв’язуванні задач.
Розглянемо основні задачі динаміки вільної матеріальної точки.
Перша (пряма), задача полягає у визначенні рівнодійної сили, якщо задано масу точки і її кінематичний закон руху, який спричиняється цією силою.
Який би спосіб (координатний чи натуральний) не застосовували, треба знайти проекції сили на осі, які дорівнюють добутку маси точки на відповідне прискорення. Тобто розв’язання першої задачі зводиться до відшукання прискорення, що неважко зробити, оскільки воно пов’язане з операцією диференціювання функцій.
Знайдені проекції повністю визначають вектор рівнодійної, тобто модуль і його напрям.
Значно складніша задача відшукання складових сил, якщо точка взаємодіє з кількома тілами. У цьому разі доводиться звертатися до третього закону Ньютона.
При
розв’язуванні другої
(оберненої)
задачі
динаміки точки відомими є маса і сили,
які прикладені до точки. Відомі також
положення точки в певний момент часу
![]() та
її швидкість
та
її швидкість
![]() .
Момент
.
Момент
![]() називають початковим моментом часу, а
положення точки та її швидкість у момент
– відповідно початковим положенням і
початковою швидкістю. За цими даними
треба знайти закон руху точки.
називають початковим моментом часу, а
положення точки та її швидкість у момент
– відповідно початковим положенням і
початковою швидкістю. За цими даними
треба знайти закон руху точки.
Друга задача динаміки значно складніша за першу, оскільки потребує інтегрування системи диференціальних рівнянь (3.6) або (3.8).
На
конкретному прикладі покажемо методику
й особливості розв’язання
другої задачі динаміки точки. Розглянемо
рух важкої матеріальної точки в середовищі
з опором, який пропорційний першій
степені швидкості. Нехай у початковий
момент часу
![]() швидкість точки дорівнює
швидкість точки дорівнює
![]() ,
яка утворює з горизонталлю кут
,
яка утворює з горизонталлю кут
![]() .
.
Точка рухається в одній площині. Знайдемо кінематичний закон руху точки. Задачу розв’язуємо у такій послідовності.
1.
Вибираємо спосіб визначення руху.
Найзручнішим є координатний спосіб.
Початок координат беремо у тій точці
площини, де була матеріальна точка в
початковий момент часу
.
Вісь
![]() горизонтальна, вісь
горизонтальна, вісь
![]() напрямлена по вертикалі вгору (рис.
3.3).
напрямлена по вертикалі вгору (рис.
3.3).
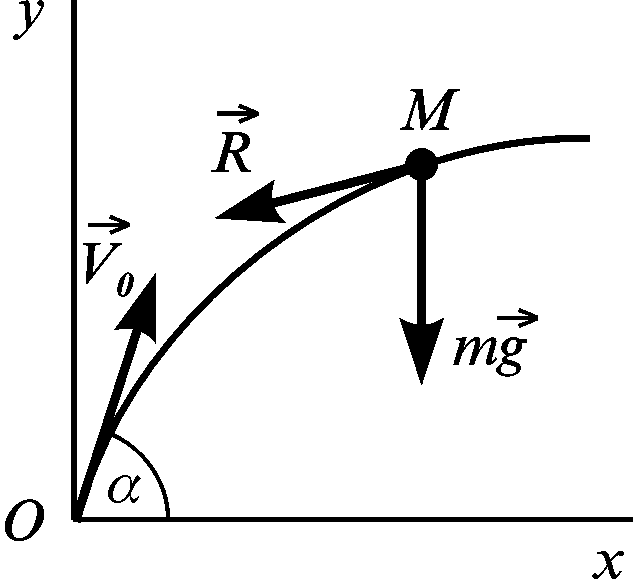
Рисунок 3.3
2.
Аналізуємо сили, які діють на точку в
будь-який довільний момент часу її руху.
Це – сила ваги
![]() та сила опору
та сила опору
![]() ,
яка пропорційна швидкості і напрямлена
в бік, протилежний швидкості:
,
яка пропорційна швидкості і напрямлена
в бік, протилежний швидкості:
![]() ,
,
де
![]() – коефіцієнт пропорційності, вибраний
у такому вигляді для спрощення подальших
обчислень.
– коефіцієнт пропорційності, вибраний
у такому вигляді для спрощення подальших
обчислень.
3. Складаємо диференціальні рівняння руху:
![]() (3.9)
(3.9)
де
прийнято, що
![]() .
.
4. Інтегруємо рівняння руху (3.9). Спочатку скорочуємо на і зауважуємо, що система розпалася на два окремі рівняння
![]()
![]() (3.10)
(3.10)
Проінтегруємо перше рівняння, яке є лінійним однорідним зі сталими коефіцієнтами. Складемо характеристичне рівняння
![]() .
.
Воно має корені
![]() ,
,
тому загальний розв’язок першого рівняння має вигляд
![]() ,
(3.11)
,
(3.11)
де
![]() – сталі інтегрування.
– сталі інтегрування.
Друге рівняння системи (3.10) на відміну від першого неоднорідне, тому його загальний розв’язок складається з двох доданків:
![]() ,
,
де
![]() – загальний розв’язок
відповідного однорідного рівняння;
– загальний розв’язок
відповідного однорідного рівняння;
![]() – частинний розв’язок
неоднорідного рівняння. Маємо
– частинний розв’язок
неоднорідного рівняння. Маємо
![]() .
(3.12)
.
(3.12)
Частинний розв’язок шукаємо у вигляді
![]() ,
(3.13)
,
(3.13)
де А – стала, яку знаходимо з умови, що задовольняє рівняння (3.10).
Диференціюючи
(3.13), знаходимо
![]() і підставляємо у рівняння (3.10):
і підставляємо у рівняння (3.10):
![]() ,
,
звідки
![]() .
(3.14)
.
(3.14)
Отже, загальний розв’язок другого рівняння має вигляд
![]() .
(3.15)
.
(3.15)
5.
Сталі інтегрування
![]() знаходимо з початкових умов. У початковий
момент часу точка знаходилася на початку
координат, тому
знаходимо з початкових умов. У початковий
момент часу точка знаходилася на початку
координат, тому
![]() .
.
Проекції початкової швидкості на осі координат
![]() .
.
Диференціюючи вирази (3.11) і (3.15) за часом, дістаємо ще два рівняння:
![]() ;
;
(3.16)
![]() .
.
Підставляємо початкові умови в (3.11), (3.15), (3.16):
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Знаходимо
![]() ,
,
![]() .
.
Після підстановки цих виразів в (3.11) і (3.15) знаходимо закон руху точки
![]() (3.17)
(3.17)
6. Останній етап розв’язання всіх задач динаміки – дослідження розв’язку. Такий аналіз проводиться залежно від умов задачі. Порівняємо закон руху (3.17) з відомою задачею Галілея про рух точки в порожнечі, коли траєкторією її руху є парабола.
Якщо
розкласти функцію
![]() в ряд
в ряд
![]()
і підставити його в (3.17), дістанемо
![]()
(3.18)
![]() .
.
Якщо
покласти в (3.18)
![]() ,
тобто розглядати рух точки в порожнині,
то знайдемо
,
тобто розглядати рух точки в порожнині,
то знайдемо
![]() (3.19)
(3.19)
Для
визначення траєкторії руху в явному
вигляді вилучимо з (3.19) час
![]() .
В результаті дістанемо
рівняння
параболи
.
В результаті дістанемо
рівняння
параболи
![]()
а це свідчить про те, що розв’язок (3.17) є шуканим.