

Фізичний маятник під дією удару
Розглянемо дію миттєвої сили на фізичний маятник.
Припустимо, що фізичний маятник знаходиться в положенні стійкої рівноваги (рис. 3.52). Вісь маятника проходить через точку О перпендикулярно до площини рисунка. Точка С – центр інерції маятника. Нехай до маятника в точці К прикладається ударна сила , напрямлена горизонтально. Дослідимо два випадки:
1) визначимо миттєві реакції, що виникають в підшипниках осі обертання при ударі;
2) визначимо, якщо це можливо, таке положення точки прикладання сили , коли вісь обертання не буде зазнавати удару.
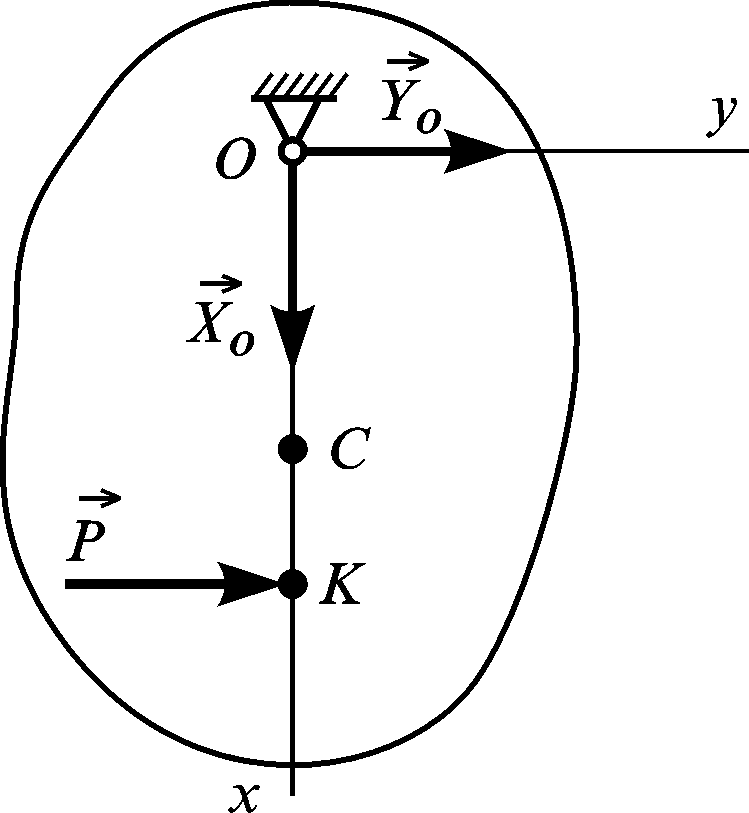
Рисунок 3.52
Останній випадок має практичне значення для конструювання ударних машин.
Раціональна конструкція машини відповідає відсутності ударної дії на вісь обертання.
Виберемо
систему координат
,
яка може бути як рухомою, так і нерухомою,
оскільки, згідно з (3.191), переміщенням
маятника за проміжок часу, що дорівнює
тривалості удару, можна знехтувати.
Розкладемо динамічну реакцію осі на
складові
![]() і
і
![]() .
.
Як було показано вище, треба скласти такі рівняння, в які ввійшли б не самі миттєві сили, а їхні імпульси. Два таких рівняння дістанемо, скориставшись теоремою про зміну кількості руху системи. Маємо:
![]() (3.213)
(3.213)
тут
![]() – імпульс ударної сили.
– імпульс ударної сили.
Третє рівняння випливає з теореми про зміну кінетичного моменту системи:
![]() ,
(3.214)
,
(3.214)
яке слід перетворити так, щоб замість ударної сили до нього входив імпульс сили . Для цього (3.214) перепишемо у вигляді:
![]() (3.215)
(3.215)
і проінтегруємо за часом від 0 до , де – тривалість удару.
Величина
![]() (3.216)
(3.216)
є
імпульсом, що розвиває сила
за час удару
.
Приріст кутової швидкості за час удару
позначимо
![]() :
:
![]() .
(3.217)
.
(3.217)
Отже, можемо написати:
![]() (3.218)
(3.218)
Рівняння (3.213) і (3.218) складають систему трьох рівнянь з п’ятьма невідомими:
![]()
Тому складемо ще два додаткових рівняння. Їх можна дістати з кінематичних міркувань. Очевидно, якщо знехтувати зміщенням маятника в напрямку осі , то
![]() .
(3.219)
.
(3.219)
Центр
інерції С
маятника дістане швидкість, напрямлену
перпендикулярно до осі
.
Це буде
![]() ,
яка зв’язана з
відомою залежністю:
,
яка зв’язана з
відомою залежністю:
![]() .
(3.220)
.
(3.220)
Співвідношення (3.219) і (3.220) разом з рівняннями (3.213) і (3.218) створюють замкнену систему.
На підставі (3.213) і (3.219) маємо:
![]() .
(3.221)
.
(3.221)
Беручи до уваги (3.220), друге рівняння (3.213) можемо записати у вигляді:
![]() .
.
Підставляючи в цей вираз (3.218), дістанемо:
![]() ,
,
звідки
![]() .
(3.222)
.
(3.222)
Результати (3.221) і (3.222) дають розв’язок першої задачі.
Знаючи цей розв’язок, можна дати відповідь і на друге поставлене питання. Очевидно, вісь маятника не буде зазнавати удару тоді, коли
![]() ,
,
тобто коли
![]() .
.
Останнє співвідношення дозволяє знайти ту відстань ОК точки прикладання сили , коли вісь обертання маятника не зазнає удару:
![]() .
.
Згадуючи теорію руху фізичного маятника і приймаючи до уваги, що
![]() ,
,
дістанемо
![]() ,
(3.223)
,
(3.223)
де – зведена довжина фізичного маятника.
Таким чином, шукана точка прикладання миттєвої сили повинна збігатись з центром коливань фізичного маятника.
Отже,
якщо прикласти миттєву силу до центру коливань фізичного маятника, то вісь маятника не буде зазнавати удару.
Ця властивість дозволяє центр коливань фізичного маятника називати центром удару.