

2.1.5. Прискорення руху точки
Прискорення – це фізична величина, що характеризує зміну вектора швидкості руху точки за часом.
На підставі цього означення і змісту підрозділу 2.1.3 можна визначити величину і напрям прискорення точки:
![]() .
(2.23)
.
(2.23)
Вектор
напрямлений по дотичній до годографа
вектора швидкості
![]() .
.
Знайдемо прискорення точки трьома способами опису її руху.
Якщо рух точки задано векторним рівнянням
,
то
швидкість
![]() ,
і на підставі (2.23) прискорення
,
і на підставі (2.23) прискорення
 .
(2.24)
.
(2.24)
Для визначення прискорення точки координатним способом скористаємося рівностями (2.7) і (2.24):
![]() .
.
Розкладаючи вектор прискорення по ортах декартової системи координат
![]()
і порівнюючи вирази, маємо
![]() .
(2.25)
.
(2.25)
Модуль вектора і його напрямні косинуси знаходимо за відомими формулами аналітичної геометрії:
![]() ;
(2.26)
;
(2.26)
![]() .(2.27)
.(2.27)
Формули (2.25)-(2.27) визначають вектор прискорення координатним способом.
Знайдемо прискорення точки, користуючись натуральним способом. Із (2.22) і (2.23) дістанемо
![]() .
(2.28)
.
(2.28)
Зауважимо,
що орт
змінює свій напрям зі зміною дугової
координати
,
тобто його можна розглядати як складну
функцію часу
![]() .
Отже,
.
Отже,
![]() .
(2.29)
.
(2.29)
Розглянемо похідну від за :
![]() .
.
Знайдемо
напрям вектора
![]() і його модуль.
і його модуль.
Вектор
напрямлений, як відомо, по дотичній до
годографа вектора
.
Оскільки
– одиничний вектор, його годографом є
крива, розміщена на поверхні сфери
одиничного радіуса. Тому вектор
утворює з вектором
прямий кут (рис. 2.8). З’ясуємо, вздовж
якої нормалі напрямлений вектор
.
Для цього розглянемо граничний напрям
вектора
![]() .
Щоб його побудувати, проведемо одиничні
вектори
і
.
Щоб його побудувати, проведемо одиничні
вектори
і
![]() в сусідніх точках М
і
,
де
в сусідніх точках М
і
,
де
![]() .
Побудуємо в точці М
вектор
.
Побудуємо в точці М
вектор
![]() ,
що дорівнює
.
Тоді
,
що дорівнює
.
Тоді
![]() .
.
Якщо
![]() ,
точка
,
точка
![]() ,
то площина трикутника
,
то площина трикутника
![]() ,
обертаючись навколо вектора
,
наближається до певного граничного
положення. Це граничне положення площини
трикутника
знаходиться в стичній площині кривої
в точці М.
Отже, нормаль, вздовж якої напрямлений
вектор
,
лежить в стичній
площині. Цю нормаль називають головною
нормаллю
кривої.
,
обертаючись навколо вектора
,
наближається до певного граничного
положення. Це граничне положення площини
трикутника
знаходиться в стичній площині кривої
в точці М.
Отже, нормаль, вздовж якої напрямлений
вектор
,
лежить в стичній
площині. Цю нормаль називають головною
нормаллю
кривої.
Зауважимо, що всі точки будь-якої плоскої кривої лежать у стичній площині.
З рис. 2.8 видно, що вектор напрямлений у бік угнутості кривої, тобто в бік її центра кривини.
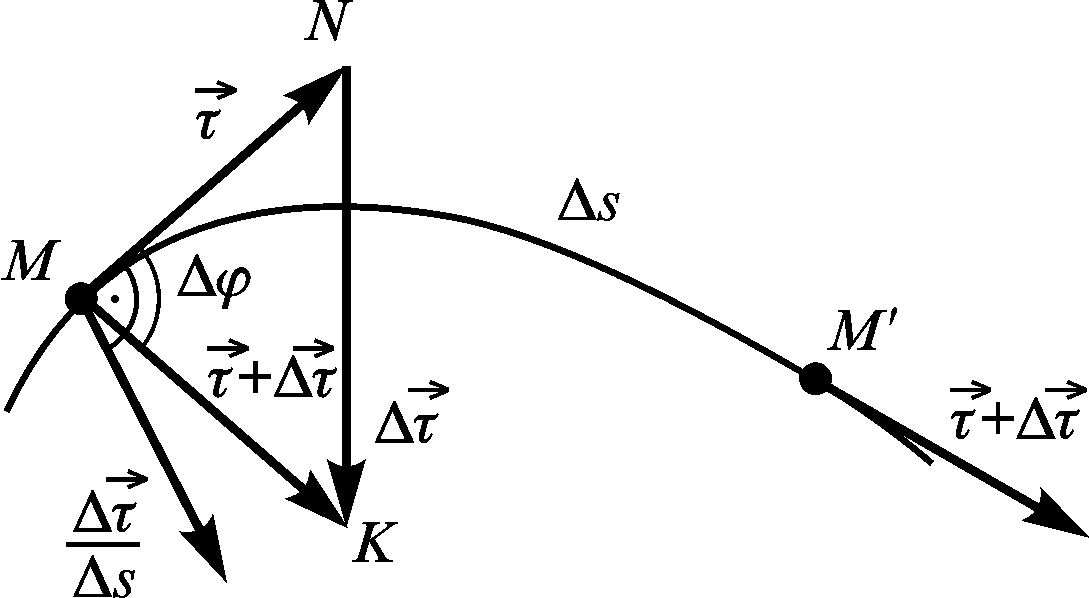
Рисунок 2.8
Визначимо модуль вектора
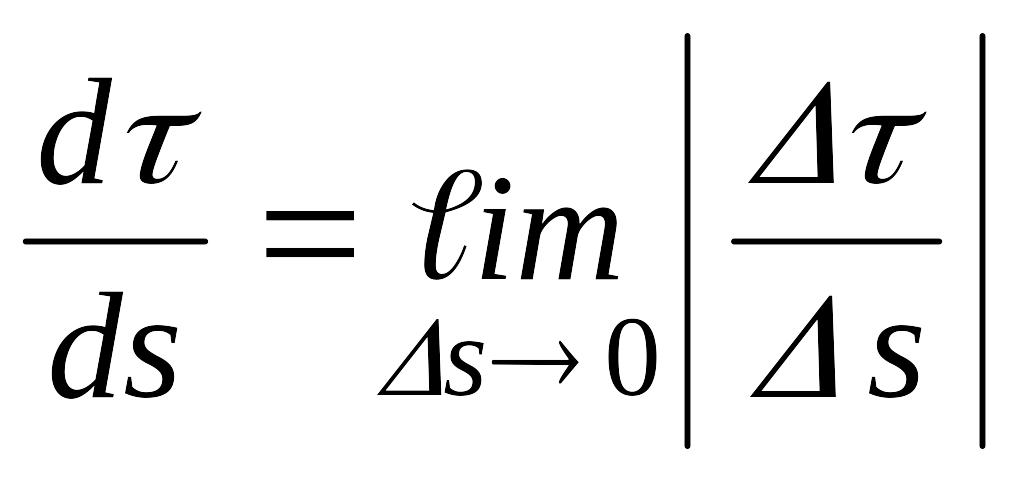 .
.
З
трикутника MNK
(рис. 2.8) знаходимо
![]() ,
оскільки
,
оскільки
![]() ,
,
тому
 .
.
Оскільки
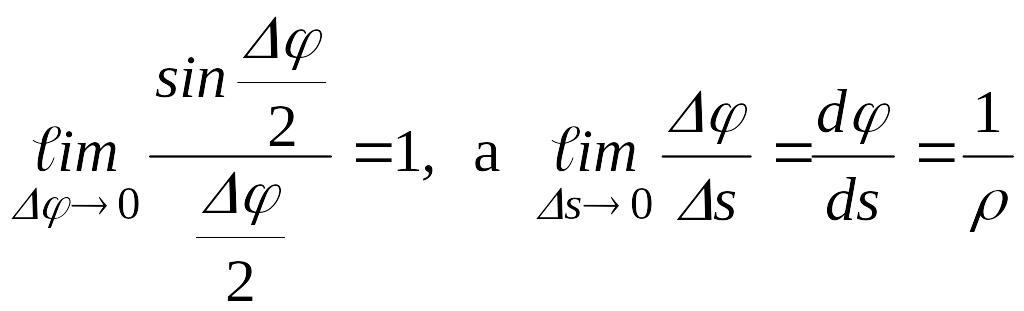 ,
,
де
![]() – радіус кривини кривої, то
– радіус кривини кривої, то
![]() .
(2.30)
.
(2.30)
Позначимо
орт головної нормалі через
![]() і напрямимо його в бік угнутості кривої.
Тоді
і напрямимо його в бік угнутості кривої.
Тоді
![]() .
(2.31)
.
(2.31)
Побудуємо
місцевий координатний базис – натуральний
тріедр (рис. 2.9). Орти дотичної і головної
нормалі створюють стичну площину кривої.
Проведемо нормаль до цієї площини. Цю
нормаль називають бінормаллю,
її орт
![]() .
У площині (
.
У площині (![]() )
розміщені всі нормалі до кривої, тому
орти (
)
утворюють нормальну
площину кривої. Орти (
)
розміщені всі нормалі до кривої, тому
орти (
)
утворюють нормальну
площину кривої. Орти (![]() )
утворюють спрямну
площину кривої.
)
утворюють спрямну
площину кривої.
Повернемось до визначення прискорення точки. На підставі (2.29) і (2.31) вираз (2.28) набуває вигляду
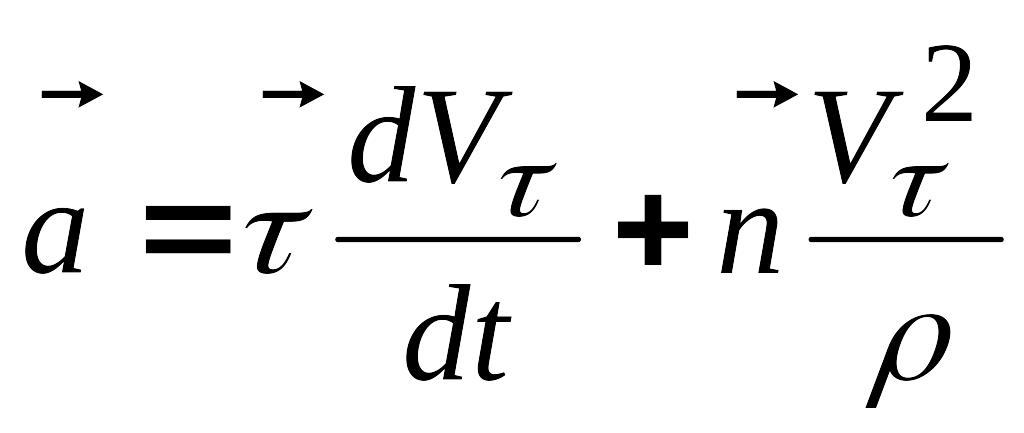 .
(2.32)
.
(2.32)
Зауважимо,
що
![]() ,
де
,
де
![]() – модуль швидкості.
– модуль швидкості.
Розкладемо вектор по ортах натурального тріедра:
![]() (2.33)
(2.33)
і порівняємо отриманий вираз із формулою (2.32):
 .
(2.34)
.
(2.34)
Як видно з (2.33), (2.34), проекція вектора прискорення на бінормаль дорівнює нулеві.
Отже,
вектор прискорення точки лежить завжди
у стичній площині траєкторії точки.
Проекцію
![]() називають дотичним, або тангенціальним
прискоренням, проекцію
називають дотичним, або тангенціальним
прискоренням, проекцію
![]() –
доцентровим або нормальним прискоренням.
–
доцентровим або нормальним прискоренням.
Повне прискорення точки є векторною сумою дотичного і нормального прискорень (рис. 2.10).
![]() .
.
|
|
Рисунок 2.9 |
Рисунок 2.10 |

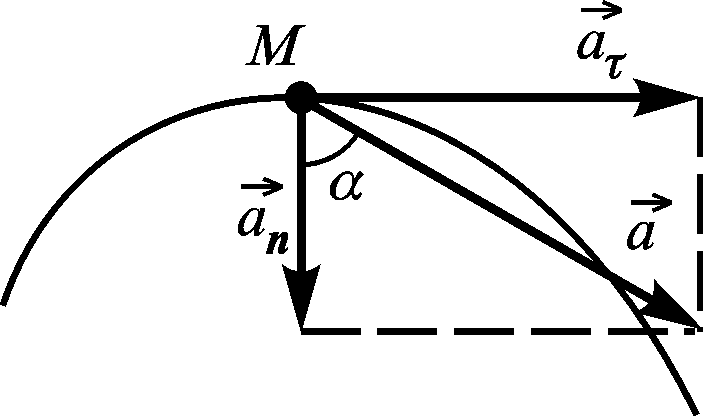
Модуль прискорення і його напрям:
![]() .
(2.35)
.
(2.35)
Отже, формули (2.33), (2.34), (2.35) визначають вектор прискорення натуральним способом.