

2.1.3. Годограф векторної функції
Введемо
поняття годографа функції
![]() .
Це поняття для векторної функції
аналогічне поняттю графіка скалярної
функції
.
Це поняття для векторної функції
аналогічне поняттю графіка скалярної
функції
![]() .
Якщо
.
Якщо
![]() –
неперервна функція, то неперервній
зміні аргумента
–
неперервна функція, то неперервній
зміні аргумента
![]() відповідає неперервна зміна функції
відповідає неперервна зміна функції
![]() .
Ця зміна визначається графіком.
.
Ця зміна визначається графіком.
Р
Рисунок 2.4
![]() ,
дістанемо відповідні значення функції
,
дістанемо відповідні значення функції
![]() .
Проведемо з фіксованої
точки О
вектори
.
Якщо аргумент
змінюється неперервно від
.
Проведемо з фіксованої
точки О
вектори
.
Якщо аргумент
змінюється неперервно від
![]() до
до
![]() ,
то кінець вектора
,
то кінець вектора
![]() опише відрізок кривої, що називається
годографом векторної функції. Отже,
опише відрізок кривої, що називається
годографом векторної функції. Отже,
годографом
векторної
функції
![]() скалярного
аргумента
називають криву, що її викреслює кінець
радіуса-вектора, який приймає значення
вектора
при неперервній зміні аргумента
.
скалярного
аргумента
називають криву, що її викреслює кінець
радіуса-вектора, який приймає значення
вектора
при неперервній зміні аргумента
.
Щоб
знайти рівняння годографа в параметричному
вигляді, досить вибрати довільну
ортогональну систему координат
![]() з початком у точці О
і знайти проекції вектора
на ці координатні осі.
з початком у точці О
і знайти проекції вектора
на ці координатні осі.
Рівняння
![]() .
(2.13)
.
(2.13)
є
скалярними рівняннями годографа
векторної функції
![]() .
.
Розглянемо похідну від функції . Похідною векторної функції за часом називають змінний вектор, що визначається рівністю
![]() ,
(2.14)
,
(2.14)
якщо границя в правій частині (2.14) існує.
Доведемо,
що похідна
![]() є вектором, напрямленим по дотичній до
годографа функції
.
є вектором, напрямленим по дотичній до
годографа функції
.
Розглянемо
приріст аргумента
![]() і відповідний йому приріст функції
і відповідний йому приріст функції
![]() .
Певному значенню функції
відповідає точка М
її годографа (рис. 2.5). Векторові
.
Певному значенню функції
відповідає точка М
її годографа (рис. 2.5). Векторові
![]() відповідає точка
відповідає точка
![]() годографа. Відношення
годографа. Відношення
![]() є вектором, нап-рямленим по січній
є вектором, нап-рямленим по січній
![]() годографа функції
.
Якщо
годографа функції
.
Якщо
![]() ,
а точка
,
а точка
![]() ,
то січна
наближається до дотичної в точці М.
Отже, вектор
напрямлений по дотичній до годографа
функції
.
,
то січна
наближається до дотичної в точці М.
Отже, вектор
напрямлений по дотичній до годографа
функції
.
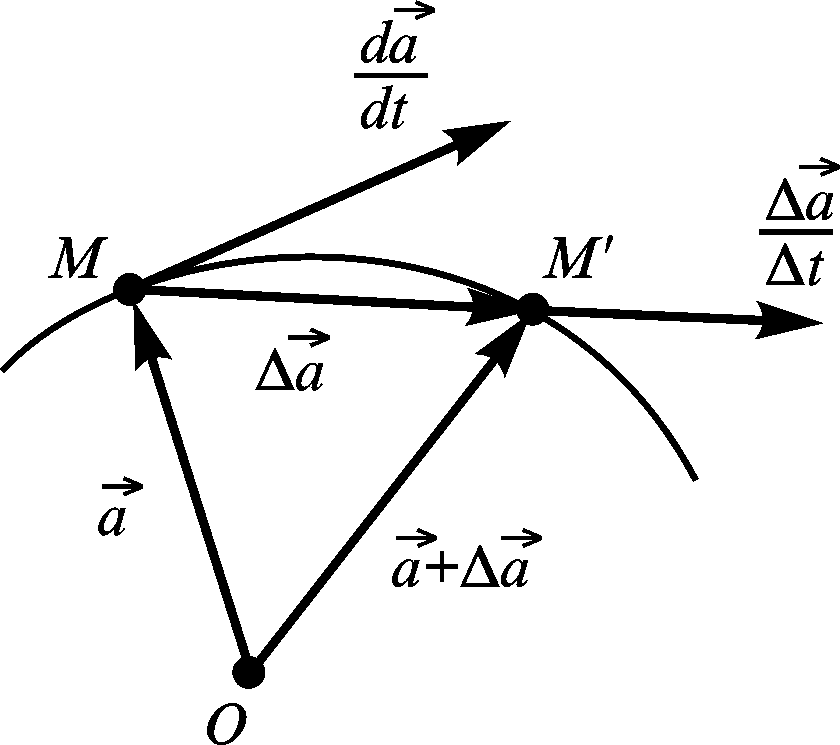
Рисунок 2.5
Як
відомо, похідна від скалярної функції
визначає напрям дотичної до графіка
функції, а її фізичний зміст полягає у
визначенні зміни функції залежно від
зміни аргумента. Отже, фізичний
зміст
похідної векторної функції можна вважати
аналогічним – похідна
векторної функції
![]() визначає зміну вектора
за часом t
і напрямлена по дотичній до годографа
функції
.
визначає зміну вектора
за часом t
і напрямлена по дотичній до годографа
функції
.
2.1.4. Швидкість руху точки
Перейдемо до вивчення основних кінематичних величин, що характеризують рух точки в просторі. Такими величинами є швидкість точки та її прискорення.
Як і в підрозділі 2.1.2, скористаємось трьома способами визначення руху точки.
Швидкістю точки називають фізичну величину, що характеризує зміну положення точки в просторі, що визначається радіусом-вектором, зі зміною часу.
При векторному способі визначення руху точки закон її руху має вигляд
![]() .
.
Траєкторія
точки – годограф функції
![]() .
.
На основі визначення поняття швидкості і фізичного змісту похідної векторної функції скалярного аргумента робимо висновок, що
швидкість точки є вектор, який дорівнює похідній за часом від радіуса-вектора:
![]() .
(2.15)
.
(2.15)
Т
Рисунок 2.6
Вектор
швидкості напрямлений по дотичній до
годографа вектора
![]() ,
тобто по дотичній до траєкторії точки
в той бік, що відповідає зростанню часу
(рис.
2.6).
,
тобто по дотичній до траєкторії точки
в той бік, що відповідає зростанню часу
(рис.
2.6).
Рівність (2.15) визначає вектор швидкості точки векторним способом математичного опису її руху.
Розглянемо визначення швидкості координатним способом. З рівностей (2.7) і (2.15) маємо
![]() .
.
Розкладаючи
вектор
![]() по ортах ортогональної системи декартових
координат
по ортах ортогональної системи декартових
координат
![]()
і порівнюючи вирази, маємо
![]() .
(2.16)
.
(2.16)
За відомими проекціями вектора швидкості на координатні осі, легко знайти модуль вектора швидкості і його напрямні косинуси:
![]() ;
(2.17)
;
(2.17)
![]() .
(2.18)
.
(2.18)
Рівності (2.16)-(2.18) визначають вектор швидкості точки координатним способом математичного опису її руху.
Знайдемо швидкість, припускаючи, що рух точки задано натуральним способом. Розглядаючи радіус-вектор точки як складну функцію часу, згідно рівностей (2.8), (2.10) і (2.15) дістанемо
![]() .
.
З’ясуємо зміст кожного співмножника останньої рівності.
Розглянемо вектор
![]() .
(2.19)
.
(2.19)
На
підставі змісту підрозділу 2.1.3 твердимо,
що цей вектор напрямлений по дотичній
до траєкторії у бік додатних дугових
координат. Справді, якщо
![]() ,
то вектор
,
то вектор
![]() напрямлений у бік додатних дугових
координат
(рис. 2.7). У цей самий бік напрямлений і
вектор
напрямлений у бік додатних дугових
координат
(рис. 2.7). У цей самий бік напрямлений і
вектор
![]() .
Зі зміною знака
змінюється і знак
.
Отже, напрям
залишається попереднім. Модуль вектора
дорівнює одиниці:
.
Зі зміною знака
змінюється і знак
.
Отже, напрям
залишається попереднім. Модуль вектора
дорівнює одиниці:
![]() ,
,
оскільки
![]() є довжиною хорди
(рис. 2.7).
є довжиною хорди
(рис. 2.7).

Рисунок 2.7
Отже, — орт дотичної до траєкторії.
На підставі викладеного дістанемо
![]() .
(2.20)
.
(2.20)
Щоб
визначити
![]() ,
домножимо рівність (2.20) скалярно на
вектор
:
,
домножимо рівність (2.20) скалярно на
вектор
:
![]() .
(2.21)
.
(2.21)
Отже, є проекцією швидкості на дотичну до траєкторії. Таким чином,
![]() .
(2.22)
.
(2.22)
Рівності (2.20)-(2.22) визначають вектор швидкості точки натуральним способом математичного опису її руху.