

По виду математического описания
Линейные системы описываются линейными дифференциальными уравнениями. Для линейных систем справедлив принцип суперпозиции. Реакция системы на любую комбинацию внешних воздействий равна сумме ее реакций на каждое из этих воздействий в отдельности.
Это позволяет выразить реакцию системы на любое сложное воздействие через последовательность ее реакций на простые воздействия. Благодаря этому принципу и была разработана общая теория линейных САУ.
Однако практически все реальные системы нелинейны, поскольку чтобы система стала нелинейной достаточно иметь в ее составе хотя бы одно нелинейное звено.
Нелинейные системы описываются нелинейными уравнениями, которые в общем виде не решаются. Поэтому для получения аналитического решения, описывающего поведение таких систем, прибегают к линеаризации – замене нелинейных зависимостей линейными приближениями, которые не слишком искажают реакцию реальных САУ.
Стационарной называют САУ, все внутренние параметры которой постоянны. В нестационарной системе ее параметры являются функциями времени. Поэтому реакция такой САУ на одно и то же воздействие зависит от момента его приложения. Например, СУ полетом ракеты, масса которой изменяется по мере расхода топлива.
IV. По виду сигналов
В зависимости от вида входных и выходных сигналов различают непрерывные и дискретные системы.
В непрерывных (аналоговых) системах все сигналы представляют собой непрерывные функции времени. Часто для передачи информации используются гармонические сигналы, модулированные по амплитуде, частоте или фазе
y = А sin (ω t + φ).
Дискретная система содержит хотя бы одно звено дискретного действия, выходная величина Y которого изменяется дискретно (скачками) даже при плавном изменении входных величин X.
Если скачки Y происходят при прохождении Х определенных пороговых значений (квантование по уровню на рис. 2.3) – имеем релейные системы. Если скачки Y происходят через определенные интервалы (дискретизация по времени) получаем импульсные системы.

Рис. 2.3. Примеры релейных характеристик:
а – обычные; б – с зоной нечувствительности ;
в - с зоной нечувствительности и гистерезисом h.
В технике автоматического управления для передачи информации широко используется амплитудная, широтная или частотная модуляция.
В кодово-импульсных системах квантование сигналов осуществляется как по времени, так и по уровню. К этому большому классу АСУ относятся и цифровые системы – ЭВМ и микропроцессоры, в которых информация о параметрах объектов циркулирует в виде числовых кодов.
В комбинированных системах аналоговые и дискретные сигналы взаимно преобразуются.
V. По характеру задающего воздействия
1) В системах автоматической стабилизации (САС) задающее воздействие остается постоянным. Основная задача – поддержание регулируемой величины, независимо от возмущений, на постоянном уровне с допустимой погрешностью – регулирование по возмущению.
САС характеризуются отклонением регулируемой величины – разностью между значением регулируемой величины в данный момент времени и ее заданным постоянным значением.
δ (t) = y (t) – уо.
Это дает качественную оценку динамическим свойствам САС.
На рисунке 2.4 дан график изменения регулируемой величины y(t). Пусть в момент времени t1 возмущающее воздействие f(t) скачком изменилось от величины F1 до величины F2 (прямая 1). Это вызовет изменение регулируемой величины у(t) (кривая 2) и отклонение ее от исходного значения у(t1). Тогда, в соответствии с определением, ордината ВС будет представлять отклонение регулируемой величины в момент времени t2.
П римером
таких систем является система стабилизации
температуры методической нагревательной
печи прокатного стана.
римером
таких систем является система стабилизации
температуры методической нагревательной
печи прокатного стана.
Рис. 2.4. Изменение параметров в системе автоматической стабилизации
Системы программного управления (СПУ) обеспечивают изменение регулируемой величины по наперед заданному закону – программе. Задающее воздействие является известной функцией времени или координат системы (рисунок 2.5).
При управлении по заданию о точности работы системы судят по величине динамической ошибки, которая определяется как разность между задающим воздействием и регулируемой величиной в данный момент времени δ (t) = g (t) – y (t).
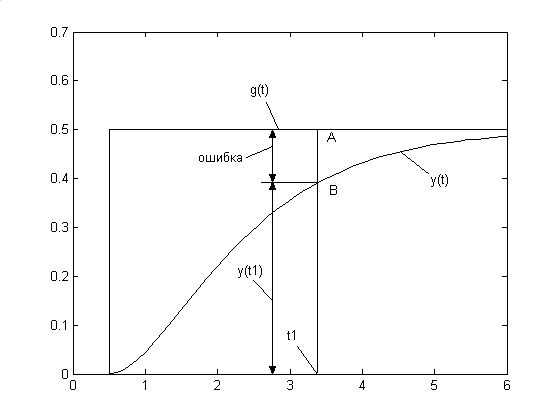
Рис. 2.5. Изменение параметров в системе программного управления
Предположим, что задающее воздействие g(t) в момент времени t = 0 скачком изменилось от нуля до некоторой постоянной величины и в последующие моменты времени остается неизменным (линия 1). Это вызовет реакцию системы, определяемую кривой 2. Тогда ошибкой для момента времени t1 будет отрезок АВ.
Пример – система программного управления нажимным устройством реверсивного прокатного стана, которое обеспечивает изменение положения верхнего валка перед каждым проходом в соответствии с заданной программой обжатий.
В следящих системах задающее воздействие так же, как в системах программного управления, является переменной величиной. Однако источником задающего сигнала служит случайное внешнее воздействие.
Например, система синхронизации скорости каретки летучих ножниц со скоростью прокатки в последней клети непрерывного стана является следящей системой. В ней каретка «следит» за движением полосы.
Так как следящие системы предназначены для воспроизведения на выходе задающего воздействия с возможно большей точностью, то качество их работы тоже оценивают динамической ошибкой
δ (t) = g (f (t)) – y (t).