

10 Автоматические регулирующие устройства
Требуемое качество регулирования зависит от условий протекания технологического процесса и работы агрегата. Оно должно обеспечить точность поддержания технологического режима и его экономическую эффективность.
В каждом случае определяют наиболее существенные показатели качества переходного процесса, которые необходимо обеспечить в первую очередь. Чаще всего, это максимальное динамическое отклонение, время регулирования или интегральный показатель.
10.1 Типовые оптимальные переходные процессы регулирования
Рассмотрим систему управления, в задачу которой входит поддержание заданного значения выходной величины при различных внешних воздействиях. Обычно стараются реализовать один из трех типовых оптимальных процессов регулирования.
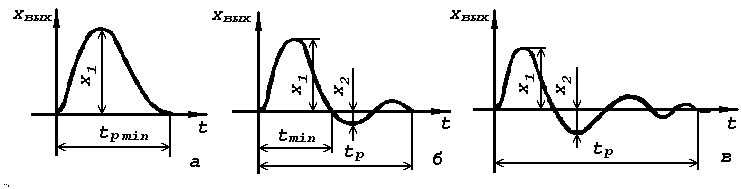
Рис. 10.1. Типовые оптимальные переходные процессы регулирования
1) Апериодический процесс с минимальным временем регулирования. Характеризуется минимальной величиной общего времени регулирования tр и минимальным регулирующим воздействием. Применяется при большом допустимом динамическом отклонении регулируемой величины у1 (рис. 10.1,а).
2) Процесс с 20%-ным перерегулированием и минимальным временем первого полупериода колебаний рекомендуется применять в тех случаях, когда допускают определенную величину перерегулирования (отношения у2/у1), но предъявляют более жесткие, чем в предыдущем случае, требования к величине динамического отклонения x1 (рис. 10.1,б).
3) Процесс с минимальным квадратичным интегральным показателем ( min x2dt ) характеризуется наибольшими перерегулированием (у2/у1 = 40…45%) и tр временем регулирования, но зато минимальной величиной динамического отклонения у1 (рис. 10.1,в).
10.2 Законы регулирования и автоматические регуляторы
Для реализации этих переходных процессов в САУ реальными объектами применяют автоматические регуляторы – специальные автоматические устройства, подключаемых к объекту регулирования, которые обеспечивают поддержание заданных значений его регулируемых величин или изменение их по определенному закону.
На рис. 10.2 приведена схема простейшей системы управления с регулирующим устройством РУ.
Законом (алгоритмом) регулирования называют математическую зависимость между выходным регулирующим воздействием Yр и входным отклонением Xр регулируемой величины Y от заданного значения Yо
Yр = f (Xр), где Xр = Yo – Y .

Рис. 10.2. Схема системы управления
В идеальных условиях работы САР (линейность характеристики объекта, стационарность случайных возмущений, малая инерционность регулятора по сравнению с объектом) регулятор должен иметь линейную передаточную функцию
По характеру работы регуляторы делятся на непрерывные, импульсные и релейные. Наиболее широкое распространение получили регуляторы непрерывного действия, использующие линейные законы регулирования вида
![]() , (10.1)
, (10.1)
где Ci – настройки регулятора.
Различают три типовых закона регулирования:
П – пропорциональный; И – интегральный; Д – дифференциальный.
Для управления реальными объектами в современных регулирующих устройствах реализуются также следующие комбинации этих законов:
ПИ – пропорционально–интегральный;
ПД – пропорционально–дифференциальный;
ПИД – пропорционально–интегральный–дифференциальный.
Настройками непрерывных регуляторов П–, И–, ПИ–, ПД– и ПИД–действия можно реализовать любой из трех типовых оптимальных процессов регулирования.
В соответствии с реализуемыми законами регулирования регуляторы непрерывного действия делятся на следующие типы.
1. Пропорциональные или П–регуляторы, в которых выходная величина Yрр связана с входной величиной Xр соотношением Yр = Kp Xр. Передаточная функция – Wр(p) = Кр, где Кр – коэффициент передачи регулятора.
Каждому значению регулируемого параметра Y соответствует определенное значение отклонения Хр. При отклонении Y от заданного значения Xo, на выходе сразу возникает изменение регулирующего воздействия Yp, приводящее к восстановлению заданной величины Y. Такая жесткая зависимость между входной и выходной величинами приводит к статической ошибке системы
Хст = Yуст – Хо , которая обратно пропорциональна Кр.
Зато П–регуляторы просты, работают быстро и устойчиво.
Интегральные или И–регуляторы, у которых изменение выходной величины пропорционально интегралу изменения входной величины

П ередаточная функция И–регулятора
На рис. 10.3 приведены переходная характеристика И–регулятора (а) и переходной процесс в ТОУ при реализации И–закона регулирования (б).
Постоянная времени интегрирования (время изодрома – перестройки) Ти , от величины которой зависит угол переходной характеристики Yp(t).

а б
Рис. 10.3. Переходная характеристика И–регулятора (а) и переходной процесс в ТОУ при реализации И–закона регулирования (б)
При этом законе регулирования скорость перемещения регулирующего органа пропорциональна отклонению регулируемой величины Y от заданного значения Xo. Отсутствует жесткая зависимость между Xр и Y, поэтому статическая ошибка равна нулю.
Этот регулятор выигрывает по точности, но проигрывает по быстродействию и устойчивости работы. Таким системам регулирования присуща высокая колебательность переходного процесса.
И–регуляторы применяют для управления малоинерционными объектами с небольшим временем запаздывания и существенным самовыравниванием.
Пропорционально–интегральные или ПИ–регуляторы, у которых изменение выходной величины пропорционально как изменению входной величины, так и интегралу ее изменения
![]() ,
,
где Tи – время интегрирования, в течение которого регулирующее воздействие, обусловленное работой П–составляющей, будет удвоено под действием И–составляющей регулятора (см. рис. 10.4).

Рис. 10.4. Переходная характеристика ПИ–регулятора
Передаточная функция ПИ-регулятора
![]() .
.
По быстродействию этот регулятор ближе к пропорциональному, чем к интегральному. При этом И–часть устраняет статическую ошибку регулирования.
Пропорционально–дифференциальные или ПД–регуляторы, которые оказывают суммарное воздействие на регулирующий орган, пропорциональное как отклонению регулируемой величины, так и скорости ее отклонения
![]() ,
,
где TД – время предварения (дифференцирования), с.
Передаточная функция ПД–регулятора имеет вид
Wпд (p) = kр (1 + TД p) .
Введение Д–части целесообразно при управлении объектами, в которых сильно проявляется скорость отклонения регулируемой величины. Предваряющее воздействие повышает быстродействие системы, но не исключает статическую ошибку.
У пропорционально–интегрально–дифференциальных регуляторов (ПИД) изменение выходной величины ур пропорционально и отклонению регулируемой величины, и интегралу этого отклонения, и его скорости
 .
.
На рис. 10.5 представлена переходная характеристика ПИД–регулятора.

Рис. 10.5. Переходная характеристика ПИД–регулятора
Передаточная функция ПИД–регулятора
Wпид (p) = Kp ( 1 + 1/ Ти p – Тд р )
или, после преобразования в канонический вид –
![]() .
.
По характеру функционирования в САР этот закон с увеличением Тд приближается к ПД, а при уменьшении Ти – к ПИ-закону.
ПИД-закон значительно улучшает качество регулирования, особенно при резких возмущениях. Однако такие регуляторы – самые сложные по технической реализации и настройке и, следовательно, самые дорогие.