

Определение Угла встречи рв с воздущной целью

![]() .
.
![]()
![]()
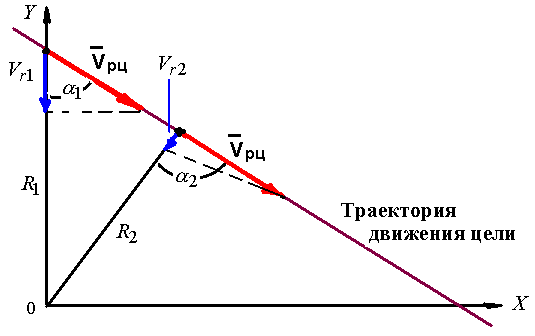
Исходные предпосылки:
![]()
![]() т.к.
т.к.
![]() ,
,
тогда
![]() (1)
(1)
C учетом теоремы синусов
![]()
откуда
![]() (2)
(2)
Обозначим
![]() (3)
(3)
Из
(2)
 (4)
(4)
Из
(1)
Заменим
![]()
 откуда
откуда

или
 (5)
(5)
![]() .
Обозначив
.
Обозначив
 получим
получим


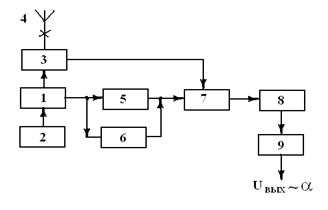
Общая структурная схема определение угла встречи РВ с воздущной “точечной” целью с корреляционной обработкой сигнала с применением двух фиксированных линий задержек сигнала:
1 – генератор СВЧ;
2 – модулятор сложного сигнала;
3 – циркулятор;
4 – слабонаправленная приемо-передающая антенна;
5 – первая линия задержки;
6 – вторая линия задержки;
7 – смеситель;
8 – усилитель доплеровских частот;
9 – блок вычислений.
Автономный измеритель угла подхода летательного аппарата к протяженной поверхности по изочастотным линиям
Исходное состояние полета ЛА
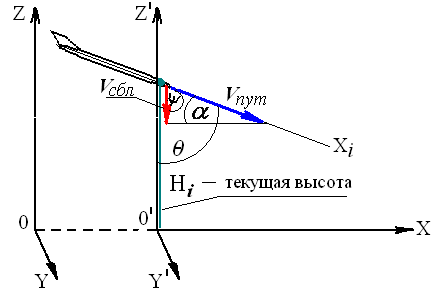
Измерения угла встречи ЛА с распределенной поверхностью по форме изочастотных линий производятся при условиях:
а) распределенная поверхность (земная, морская) плоская;
б) радиолокатор
движется прямолинейно и равномерно в
плоскости X0Z
под некоторым углом
![]() к распределенной поверхности, задаваемой
уравнением
z = H
к распределенной поверхности, задаваемой
уравнением
z = H
формирование Изочастотныз линий на поверхности
В скорость сближения
ЛА с распределенной поверхностью
оценивается по: радиальной составляющей
![]() вектора путевой скорости
вектора путевой скорости
![]() ,
по частоте Доплера - FД
при длине волны -
,
по частоте Доплера - FД
при длине волны -![]() и углом посадки -
и углом посадки -![]() ,
так что:
,
так что:
![]() .
(1)
.
(1)
На облучаемой радиосигналом поверхности Р, от всех точек, находящихся под одинаковыми углами , формируются одинаковые частоты Доплера - изочастотные линии пересечением кругового конуса доплеровских частот с плоскостью поверхности (рис.1).
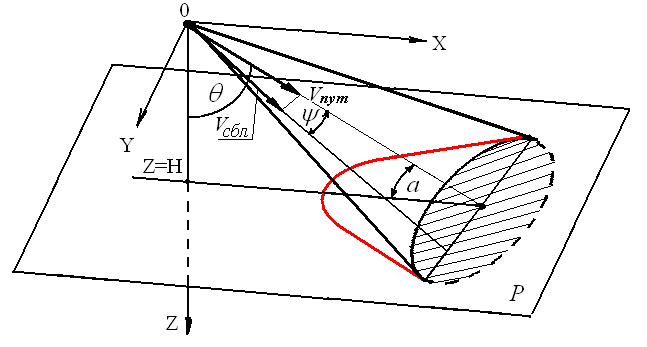
Рис.1
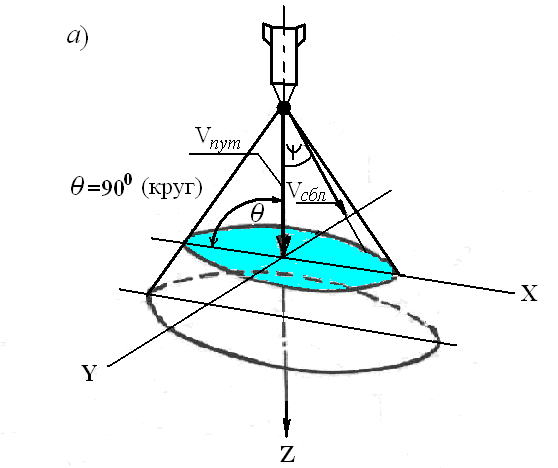
Рис.1,а
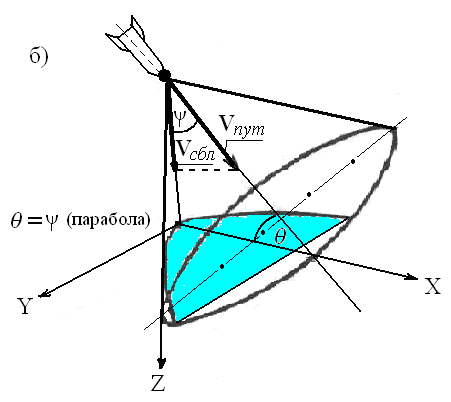
Рис.1,б

Рис.1,в
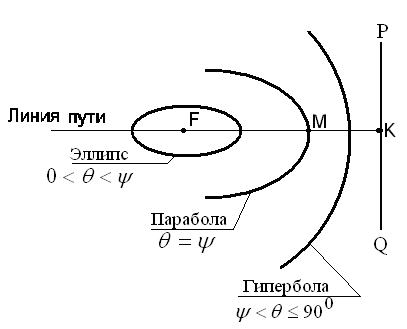
Рис.2
Способ измерения угла α основан на взаимной однозначности значения данного угла и формы изочастотной линии, т.е. линии на поверхности все точки которой визируются под одним и тем же углом к вектору путевой скорости ЛА с радиолокатором и имеют одну и туже частоту Доплера
![]() ,
,
где: V пут – путевая скорость;
![]() –длина
волны зондирующего сигнала;
–длина
волны зондирующего сигнала;
![]() –
угол, образованный
векторами путевой скорости и ее радиальной
составляющей.
–
угол, образованный
векторами путевой скорости и ее радиальной
составляющей.
Семейство
изочастотных линий доплеровских частот
являются линиями второго порядка форма
которых полностью определяется
эксцентриситетом
![]()
![]() ,
,
где FM – расстояние произвольной точки М линии второго порядка до данной точки F (фокуса) ;
MK – расстояние точки М до данной прямой PQ (директрисы).
Это отношение может быть выражено через параметры путей распространения отраженного сигнала, такие как частота Доплера или дальность образующиеся точками: F -фокуса,
М - произвольной точки линии второго порядка, К - директрисы.
Частоты Доплера
от этих точек:
![]()
Дальности
![]()
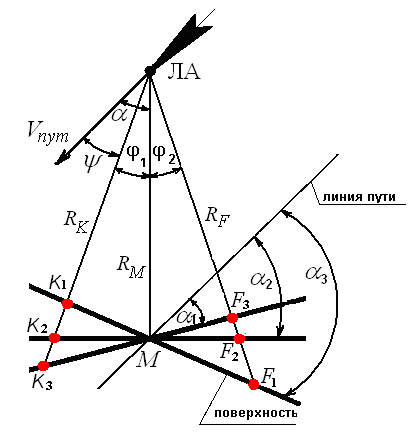
Рис.3
На рис.3 показаны параметры путей распространения отраженного от поверхности сигнала. Определение угла встречи ЛА с распределенной поверхностью заключается в следующем.
Поверхность облучается радиолокационным сигналом, а отраженные от нее сигналы преобразующиеся в приемнике радиолокатора в доплеровские частоты принимают одной слабонаправленной антенной по трем линейно-зависимым лучам. Линейно-зависимые лучи формируются тремя каналами обработки доплеровского сигнала. Для принятого сигнала находится взаимная однозначность измеряемого угла и формы изочастотной линии.
Учитывая прямую пропорциональность между частотой Доплера и радиальной скоростью, определяются линии постоянных радиальных скоростей сближения с поверхностью, образующие на отражающей поверхности изочастотные линии.
Следовательно, для определения угла встречи по форме изочастотной линии необходимо и достаточно измерить расстояния FM и MK, которые могут быть выражены через координаты этих точек, а угол встречи определяют по формуле:
![]()
![]() , (3)
, (3)
где
![]() эксцентриситет
изочастотной линии;
эксцентриситет
изочастотной линии;
![]() -
угол между составляющими вектора путевой
скорости летательного аппарата ;
-
угол между составляющими вектора путевой
скорости летательного аппарата ;
![]() - угол между
векторами путевой и радиальной
составляющей скорости летательного
аппарата.
- угол между
векторами путевой и радиальной
составляющей скорости летательного
аппарата.
Т.о., при решении
рассматриваемой проблемы возникает
задача определения положение любой
i-той
точки на линии пути. Ее можно определить
по дальности (расстоянию) R
i
от этой точки до ЛА и доплеровским
смещением частоты отраженного в i-той
точке сигнала
![]() .
На фиксированных частотах Доплера
изменение расстояний FM
и MK
будет характеризоваться только изменением
координат R
К , R
М и R
F
.Поэтому угол встречи определяется
как функция отношения этих координат,
т. е.:
.
На фиксированных частотах Доплера
изменение расстояний FM
и MK
будет характеризоваться только изменением
координат R
К , R
М и R
F
.Поэтому угол встречи определяется
как функция отношения этих координат,
т. е.:
 (4)
(4)
Данное устройство позволяет измерять углы встречи от 900 до углов, стремящихся к нулю.
Структурная схема измерителя УГЛа сближения

Рис.4
В трехканальном устройстве (рис.4) первый и второй каналы измеряют расстояние между участками, соответствующими фокусу и вершине изочастотной линии на отражающей поверхности, а второй и третий каналы измеряют расстояние между участками, соответствующими вершине изочастотной линии и директрисе.
Сигнал, отраженный от распределенной поверхности, приходит на три канала 1,2,3 измерения дальности, с выходов которых сигнал поступает на входы узкополосных фильтров 4, 5, 6 доплеровских частот, которые выделяют составляющие спектра отраженного сигнала, соответствующие их резонансным частотам, что соответствует выделению участков спектра на отражающей поверхности с заданным смещением частоты Доплера.
Сигналы с выходов фильтров 4,5,6 поступают на вторые входы (обратная связь) каналов 1,2,3 измерения дальности, вследствие чего происходит слежение за дальностью, например, по максимуму функции селекции по дальности.
Со вторых выходов каналов измерения дальности снимаются напряжения, пропорциональные расстояниям от радиолокатора до выделенных участков на отражающей поверхности, которые поступают на вычитающие блоки 7 и 8.
Разностные напряжения, снимаемые с вычитающих блоков 7 и 8, пропорциональные расстояниям между фокусом и вершиной изочастотной линии и вершиной изочастотной линии и директрисой соответственно, поступают на делитель 9, на выходе которого вырабатывается напряжение, пропорциональное эксцентриситету изочастотной линии.
Напряжение с делителя 9 поступает на индикатор 10, отградуированный в соответствии с формулой,
 (5)
(5)
в которой, используя теорему косинусов, значение эксцентриситета (см.ф-лу 4)записано через координаты точек на изочастотной линии. За счет использования узкополосных фильтров доплеровских частот данный способ повышает помехоустойчивость и, кроме того, отпадает необходимость в учете погрешностей измерения за счет углов тангажа, крена и угла сноса ЛА в силу того, что форма изочастотной линии не зависит от положения летательного аппарата в пространстве, а определяется только углом встречи ЛА с распределенной поверхностью.