

Обозначения и определения для оценки положения цели в пространстве
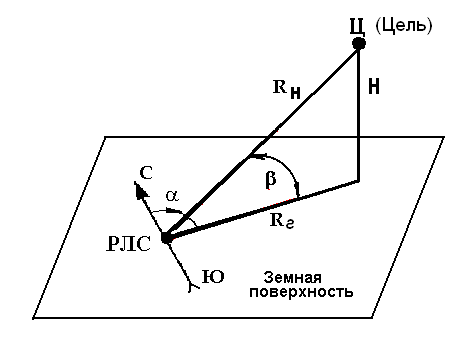
Рис.1. Характеристики положения цели
С-Ю - исходное направление отсчета азимута,
- азимут, - угол места,
Rн - наклонная дальность, Rr - горизонтальная дальность.

Рис.2. Азимут и угол места ЛА
Наклонная дальность Rн - расстояние по прямой между точкой наблюдения (РЛС) и целью.
Горизонтальная дальность Rг - проекция наклонной дальности на горизонтальную плоскость.
Высота положения объекта Н- минимальное расстояние от цели до линии проекции наклонной дальности.
Меридиональная плоскость – плоскость, проходящая вдоль оси АРЛС (см. рис.2.) .
Экваториальная плоскость – плоскость, перпендикулярная строительной оси АРЛС.
Б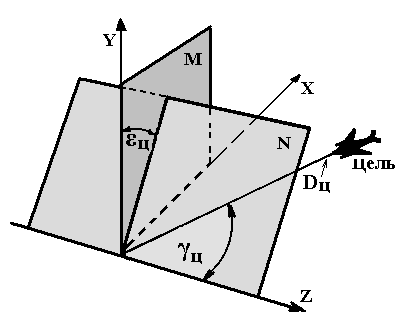 иплоскостная
система координат
- в ней для определения положения цели
в пространстве необходимо провести
наклонную плоскость N
(рис.3) через
ось OZ
и цель.
иплоскостная
система координат
- в ней для определения положения цели
в пространстве необходимо провести
наклонную плоскость N
(рис.3) через
ось OZ
и цель.
Рис.3. Биплоскостная система координат для определения
положения воздушной цели в наклонной плоскости
Дальность обнаружения цели Rц - максимальные и минимальные расстояния, на которых обнаруживается объект с заданной вероятностью.
Дальность действия АРЛС Ro - это то расстояние, на котором должна быть подана исполнительная команда, обеспечивающая согласование области ОС с областью ОП, с требуемой вероятностью.
Разрешающая способность R, V, , - есть минимальная величина параметра, обеспечивающая однозначное раздельное измерение двух измеряемых значений.
Вероятностные характеристики.
С учётом мешающего действия нормальной работе АРЛС непреднамеренных и преднамеренных помех, оценка тех или иных пространственно- временных величин является случайной величиной, и поэтому производится статистически с определенной вероятностью. Ниже приведены некоторые из этих величин.
Правильное обнаружение (Рпо) - вероятность принятия решения о наличии объекта, если он фактически есть.
Пропуск цели (Рпц) - вероятность принятия решения об отсутствии объекта, если он фактически есть.
Таким образом, имеем Рпо + Рпц = 1
Вероятность ложной тревоги (Рлт)- вероятность принятия решения о наличии объекта, если он фактически отсутствует.
Вероятность правильного необнаружения объекта (Рпн)- оценка степени необнаружения объекта при его отсутствии.
Таким образом, имеем: Рлт + Рпн = 1
Идеальное условие: Рпо =1; Рлт =0;
В реальных условиях: Рпо 1; Рлт 0;
Вероятность правильного обнаружения объекта.
Суть поиска заключается в том, чтобы обнаружить и выделить искомый объект на мешающем фоне. Чаще всего обнаружение объекта автономными радиолокационными системами осуществляется разовым наблюдением, при котором время весьма ограниченно, поэтому вероятность правильного обнаружения при разовом наблюдении является весьма низкой.
Зона
обнаружения (рис.4.)
задается
определенной вероятностью, например,
не ниже величины Pзад
![]() 0.7.
0.7.
Тогда Pпо=1- Q ,
где Q- вероятность неправильного обнаружения
Qi = 1- Pi
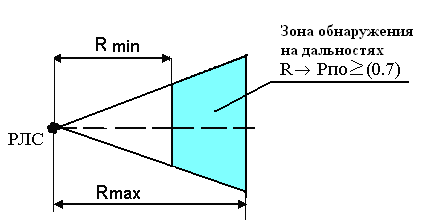
Рис.4 Зона обнаружения объекта
Если использовать многократное наблюдение и при этом принять число выборок измерений m >1, тогда вероятность неправильного обнаружения будет равна
Q=(1-Pi) m .
Следовательно, в этом случае вероятность правильного обнаружения будет возрастать
Pпо=1-(1- Pi)m .
При
увеличении числа выборок, m![]()
![]() и достаточно малых значениях вероятности
обнаружения объекта при разовой выборке
(Рi
и достаточно малых значениях вероятности
обнаружения объекта при разовой выборке
(Рi
![]() 0),
возможно получить высокую вероятность
правильного обнаружения объекта (Pпо
может стремиться к единице Pпо
1).
0),
возможно получить высокую вероятность
правильного обнаружения объекта (Pпо
может стремиться к единице Pпо
1).