

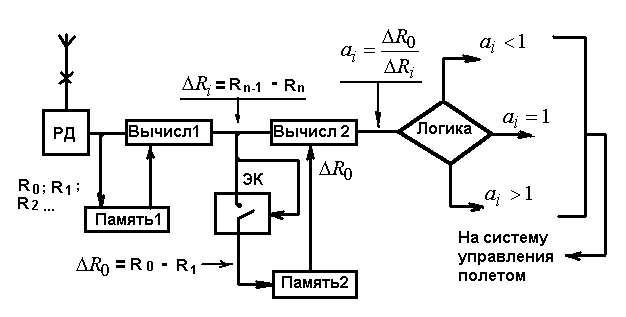
Практическая реализация средствами брл
![]()
У![]() словия
ПС
словия
ПС
![]()
![]()
![]()
![]()
![]()
![]() …
…![]()
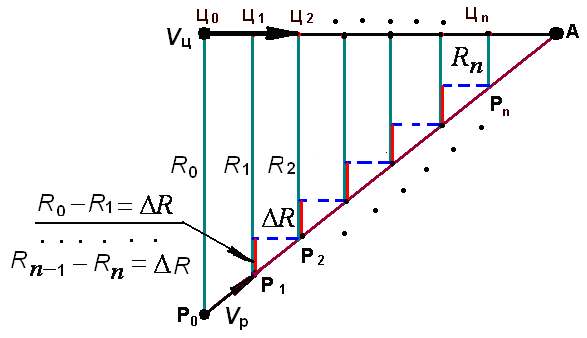
Метод пропорционального наведения (пн)
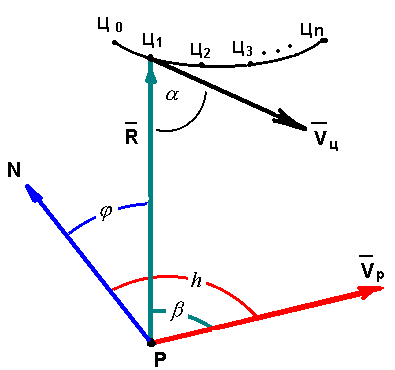
Рисунок в одной плоскости
Условие ПН:
(1)
C – навигационная постоянная
Угловая скорость
вращения
пропорциональна угловой скорости
вращения
![]() .
.
Т.к.
![]() , (2)
, (2)
тогда
![]() (3)
(3)
Из (3) следует
![]() (4)
(4)
Откуда при С= ∞ (5)
(т.к.
![]() )
)
Вывод1 При С= ∞ ПН совпадает с методом ПС
При
С=1 из (1), с учетом, что
![]() имеем
имеем
![]() (6)
(6)
Откуда
при С=1
![]() (7) (т.к.
(7) (т.к.
![]() ∞
)
∞
)
Вывод2
При С=1, выполняя
![]() , ПН совпадает с методом погони (П).
, ПН совпадает с методом погони (П).
Фактически
выбирают
![]()
Радиодальномер со сложными сигналами для выдачи исполнительных команд на малых расстояниях
Корреляционная обработка сложного сигнала в РЛ
![]()
![]()
![]()
![]() -шум
(помеха)
-шум
(помеха)
Функция взаимной корреляции
![]() -
-
Функция автокорреляции
![]()

При использовании сложного сигнала
![]()
структура радиоизмерителя малых высот
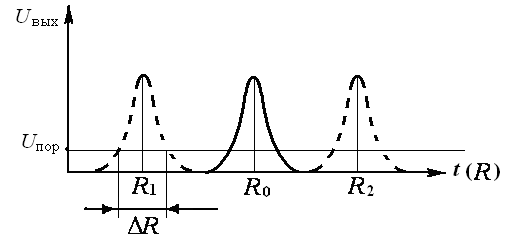
Зависимость
функции селекции по дальности
![]() от ширины спектра модулирующего шума
от ширины спектра модулирующего шума
![]() при модуляции зондирующего сигнала
сложным сигналом представляется в виде
при модуляции зондирующего сигнала
сложным сигналом представляется в виде
 .
(1)
.
(1)
![]() - функция селекции
при немодулированном зондирующем
сигнале;
- функция селекции
при немодулированном зондирующем
сигнале;
![]() -
высота до поверхности;
-
высота до поверхности;
- эффективная ширина спектра сигнала
![]() -
скорость распространения радиоволны.
-
скорость распространения радиоволны.
Радиовысотомером
с одной слабонаправленной антенной и
применением сложного зондирующего
сигнала формируется дальномерная
стробирующая блок-сфера с однозначной
дальномерной характеристикой вида
дельта-функции и радиусом
![]() ,
соответствующий величине разрешающей
способности сигнала по дальности. При
использовании последовательного
управления
,
соответствующий величине разрешающей
способности сигнала по дальности. При
использовании последовательного
управления
![]() -ой
шириной спектра зондирующего сигнала
по закону частотно шумовой модуляции,
величина (радиус) сформированной
блок-сферы по дальности
-ой
шириной спектра зондирующего сигнала
по закону частотно шумовой модуляции,
величина (радиус) сформированной
блок-сферы по дальности![]() определяется последовательно управляемой
девиацией спектра
определяется последовательно управляемой
девиацией спектра
![]() по формуле
по формуле
![]() ,
(5)
,
(5)
где
![]() - скорость распространения радиоволны;
- скорость распространения радиоволны;
![]() - порядковый номер
последовательного изменения ширины
спектра модулируемого шумового сигнала
- порядковый номер
последовательного изменения ширины
спектра модулируемого шумового сигнала
![]()
Так, например, в
начальный момент времени
![]() (
(![]() ),
при минимальной девиации (ширине спектра)
зондирующего сигнала
),
при минимальной девиации (ширине спектра)
зондирующего сигнала
![]() ,
разрешающая способность сигнала по
дальности будет самой низкой, в результате
чего, стробирующая блок-сфера будет
иметь максимальную величину
,
разрешающая способность сигнала по
дальности будет самой низкой, в результате
чего, стробирующая блок-сфера будет
иметь максимальную величину
![]() ,
при этом обнаружение радиолокационным
измерителем посадочной поверхности
производится на этой максимальной
высоте
,
при этом обнаружение радиолокационным
измерителем посадочной поверхности
производится на этой максимальной
высоте
![]() и, наоборот, при максимальной девиации
(ширине спектра) зондирующего сигнала
и, наоборот, при максимальной девиации
(ширине спектра) зондирующего сигнала
![]() (при
(при
![]() )
распределенная поверхность может быть
обнаружена на минимальной высоте,
соответствующей высокой разрешающей
способности сигнала по дальности, при
которой величина радиуса блок-сферы
будет иметь минимальное значение
)
распределенная поверхность может быть
обнаружена на минимальной высоте,
соответствующей высокой разрешающей
способности сигнала по дальности, при
которой величина радиуса блок-сферы
будет иметь минимальное значение
![]() .
.
Структурная электрическая схема радиовысотомера малых высот (РВ) с модуляцией непрерывной несущей частоты с модуляцией сложным сигналом приведена на рисунке.

Работа рассматриваемого радиолокационного высотомера заключается в следующем.
В начальный
(исходный) момент времени
![]() спуска ЛА (БП) на протяженную поверхность,
когда он находится на некоторой высоте
спуска ЛА (БП) на протяженную поверхность,
когда он находится на некоторой высоте
![]() (см.рис.), по команде включения, на клемму
“Пуск”» подается одиночный нулевой
импульс, запускающий работу генератора
высокой частоты 1, генератора тактовых
импульсов 8 и приводит индикатор высоты
11 в исходное нулевое положение.
Генератором высокой частоты 1 генерируется
модулированный модулятором 2 сложный
сигнал, который излучается через
циркулятор 3 и слабонаправленную антенну
4 в сторону посадочной поверхности, в
результате чего формируется первая
блок-сфера с начальной разрешающей
способностью по дальности (радиусом),
равной
(см.рис.), по команде включения, на клемму
“Пуск”» подается одиночный нулевой
импульс, запускающий работу генератора
высокой частоты 1, генератора тактовых
импульсов 8 и приводит индикатор высоты
11 в исходное нулевое положение.
Генератором высокой частоты 1 генерируется
модулированный модулятором 2 сложный
сигнал, который излучается через
циркулятор 3 и слабонаправленную антенну
4 в сторону посадочной поверхности, в
результате чего формируется первая
блок-сфера с начальной разрешающей
способностью по дальности (радиусом),
равной
![]() .
.

С этого момента
времени
высота положения летательного аппарата
над протяженной поверхностью продолжает
уменьшаться, однако, не достигая заранее
установленного значения дальности
сформированной первой блок-сферой
,
так что
![]() .
При таком положении летательного
аппарата над поверхностью, отраженный
от нее сигнал радиовысотомером не
обнаруживается. В это время в индикаторе
высоты 11 исходное (нулевое) показание
устанавливается командой “Пуск”. При
дальнейшем снижении летательного
аппарата над распределенной поверхностью,
в момент времени
.
При таком положении летательного
аппарата над поверхностью, отраженный
от нее сигнал радиовысотомером не
обнаруживается. В это время в индикаторе
высоты 11 исходное (нулевое) показание
устанавливается командой “Пуск”. При
дальнейшем снижении летательного
аппарата над распределенной поверхностью,
в момент времени
![]() ,
когда значение высоты его положения
становится равной величине разрешения
по дальности первого элемента блок-сферы
,
когда значение высоты его положения
становится равной величине разрешения
по дальности первого элемента блок-сферы
![]() ,
тогда протяженная поверхность, облученная
сигналом первой блок-сферы отражает
сигнал, поступающий на слабонаправленную
антенну А
с выхода которой сигнал через циркулятор
Ц
поступает на второй (сигнальный) вход
смесителя См,
на первый (гетеродинный) вход которого
сигнал поступает постоянно со второго
выхода генератора высокой частоты ГВЧ.
С выхода
смесителя См,
составляющая рабочего сигнала доплеровской
частоты, через узкополосный фильтр УПФ
и частотный детектор ЧД
поступает как на первый разрешающий
вход логического устройства ЛУ
“И” , так и на второй вход генератора
тактовых импульсов ГТИ,
генерирующий тактовые импульсы с
периодом доплеровской частоты и
поступающие с его первого выхода на
накопитель импульсов НИ,
а со второго выхода, поступающие на
второй вход индикатора высоты Инд.Выс.
После первого поступления в накопитель
НИ
определенного числа импульсных сигналов
(например,5-8 импульсов), на его выходе
появляется сигнал заранее установленного
порогового уровня, достаточного для
управления модулятором, поступающий
затем на вход модулятора Мод,
тем самым, расширяя спектр его выходного
сигнала. Сигнал с выхода накопителя
импульсов НИ
поступает так же на второй вход логического
устройства ЛУ
“И” , в результате чего на оба входа
логического устройства “И” поступают
два сигнала, которыми обеспечивается
появление на его выходе сигнала,
поступающего на третий (сигнальный)
вход индикатора высоты Инд.Выс.
Постоянное поступление импульсных
сигналов от генератора тактовых импульсов
ГТИ
на накопитель импульсов НИ
приводит к постоянному росту на его
выходе уровня сигнала, поступающего
затем на вход модулятора Мод,
на выходе которого спектр сигнала снова
расширяется, приводя к уменьшению
размеров радиуса блок-сферы и повышая
разрешающую способность сигнала по
высоте. С момента времени
,
тогда протяженная поверхность, облученная
сигналом первой блок-сферы отражает
сигнал, поступающий на слабонаправленную
антенну А
с выхода которой сигнал через циркулятор
Ц
поступает на второй (сигнальный) вход
смесителя См,
на первый (гетеродинный) вход которого
сигнал поступает постоянно со второго
выхода генератора высокой частоты ГВЧ.
С выхода
смесителя См,
составляющая рабочего сигнала доплеровской
частоты, через узкополосный фильтр УПФ
и частотный детектор ЧД
поступает как на первый разрешающий
вход логического устройства ЛУ
“И” , так и на второй вход генератора
тактовых импульсов ГТИ,
генерирующий тактовые импульсы с
периодом доплеровской частоты и
поступающие с его первого выхода на
накопитель импульсов НИ,
а со второго выхода, поступающие на
второй вход индикатора высоты Инд.Выс.
После первого поступления в накопитель
НИ
определенного числа импульсных сигналов
(например,5-8 импульсов), на его выходе
появляется сигнал заранее установленного
порогового уровня, достаточного для
управления модулятором, поступающий
затем на вход модулятора Мод,
тем самым, расширяя спектр его выходного
сигнала. Сигнал с выхода накопителя
импульсов НИ
поступает так же на второй вход логического
устройства ЛУ
“И” , в результате чего на оба входа
логического устройства “И” поступают
два сигнала, которыми обеспечивается
появление на его выходе сигнала,
поступающего на третий (сигнальный)
вход индикатора высоты Инд.Выс.
Постоянное поступление импульсных
сигналов от генератора тактовых импульсов
ГТИ
на накопитель импульсов НИ
приводит к постоянному росту на его
выходе уровня сигнала, поступающего
затем на вход модулятора Мод,
на выходе которого спектр сигнала снова
расширяется, приводя к уменьшению
размеров радиуса блок-сферы и повышая
разрешающую способность сигнала по
высоте. С момента времени
![]() индикатором высоты Инд.Выс
постоянно регистрируется число импульсов,
последовательно поступающих со второго
выхода генератора тактовых импульсов
ГТИ на второй вход индикатора высоты.
Так как радиус первой блок-сферы
индикатором высоты Инд.Выс
постоянно регистрируется число импульсов,
последовательно поступающих со второго
выхода генератора тактовых импульсов
ГТИ на второй вход индикатора высоты.
Так как радиус первой блок-сферы
![]() заранее известен и определяемый
первоначально установленным спектром
зондирующего сигнала, поэтому исходное
показание индикатора высоты определяется
этой величиной. При дальнейшем сближении
БП с поверхностью (с уменьшении высоты
его положения), работа индикатора высоты
Инд.Выс
сводится к синхронному, с доплеровской
частотой вычитанию поступивших на его
второй вход импульсов со второго выхода
генератора тактовых импульсов ГТИ
совместно с этим поступившими импульсами
на вход накопителя импульсов
НИ, на выходе
которого пропорционально увеличивается
уровень сигнала, поступающий затем на
вход модулятора Мод.
В результате этого происходит дальнейшее
повышение разрешающей способности
сигнала радиовзрывателя по высоте, при
котором уменьшается размер радиуса
блок-сферы.
заранее известен и определяемый
первоначально установленным спектром
зондирующего сигнала, поэтому исходное
показание индикатора высоты определяется
этой величиной. При дальнейшем сближении
БП с поверхностью (с уменьшении высоты
его положения), работа индикатора высоты
Инд.Выс
сводится к синхронному, с доплеровской
частотой вычитанию поступивших на его
второй вход импульсов со второго выхода
генератора тактовых импульсов ГТИ
совместно с этим поступившими импульсами
на вход накопителя импульсов
НИ, на выходе
которого пропорционально увеличивается
уровень сигнала, поступающий затем на
вход модулятора Мод.
В результате этого происходит дальнейшее
повышение разрешающей способности
сигнала радиовзрывателя по высоте, при
котором уменьшается размер радиуса
блок-сферы.
Предельно высокое
разрешение сигнала
![]() обеспечивается максимально широкой
полосой модулированного сложного
сигнала
обеспечивается максимально широкой
полосой модулированного сложного
сигнала
![]() ,
которой определяется предельно малая
высота положения БП над распределенной
поверхностью
,
которой определяется предельно малая
высота положения БП над распределенной
поверхностью
![]() .
.
При достижении
условия
![]() регистрируемая высота, соответствует
заданной высоте для подачи команды на
исполнительный механизм, например, РВ.
регистрируемая высота, соответствует
заданной высоте для подачи команды на
исполнительный механизм, например, РВ.