

3. Автоматическое сопровождение цели по дальности
Сопровождение целей по дальности может быть ручным, полуавтоматическим и автоматическим.
Ручное сопровождение заключается в непрерывном совмещении оператором измерительного импульса с отметкой цели. Этот метод не обеспечивает высокую точность сопровождения, особенно быстро перемещающихся целей.
При полуавтоматическом сопровождении перемещение измерительного импульса производится с помощью специального двигателя. Роль оператора сводится к подбору такой скорости вращения этого двигателя, при которой измерительный импульс будет все время совпадать с отметкой цели.
Автоматическое сопровождение - автоматическое слежение за дальностью до цели, без участия оператора, Если АРЛС работает в импульсном режиме, слежение осуществляется с помощью т.н. стробов — двух импульсов, симметрично расположенных относительно отметки цели.
В РЛС с ЧМ слежение может осуществляться путем такой перестройки гетеродина приемника, при которой разность частот излучаемого и отраженного сигналов остается все время постоянной.
На рис.4 приведена функциональная схема системы АСД импульсной АРЛС, а на рис.5 АРЛС с частотной модуляцией.
Первая схема включает временной различитель, интегратор, устройство плавной задержки и генератор стробирующих импульсов.
На один вход временного различителя поступают эхо сигналы с приемника (см.рис.4, а), а на второй - два стробирующих импульса (см.рис.4, б), вырабатываемых специальным генератором.
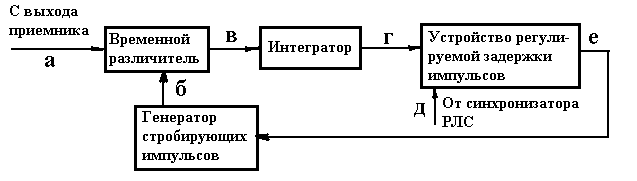

Рис.4. Функциональная схема и временные диаграммы системы АСД импульсной РЛС

Рис. 5. Функциональная схема системы РЛС
с частотной модуляцией
Временной различитель представляет собой две схемы совпадений. На одну схему совпадений подается первый (опережающий) строб 1, на вторую - строб 2. Кроме того, на эти схемы поступают сигналы с выхода приемника На выходе каждой схемы совпадений возникают импульсы, длительность которых зависит от степени «перекрытия» соответствующего строба отраженным от цели сигналом.
Полярности этих импульсов противоположны (см.рис.4, в). После интегрирования выходных импульсов схем совпадений получается напряжение (см.рис.4,г), которое поступает на устройство регулируемой задержки импульсов (фантастрон) и выполняет роль управляющего напряжения. Сюда же подаются синхронизирующие импульсы. На выходе устройства регулируемой задержки получаются импульсы, задержанные относительно синхронизирующих на время tстр (см.рис.4, е), определяемое управляющим напряжением U ynp.
В генераторе стробирующих импульсов (ГСИ) из этого напряжения формируется первый строб. Второй строб получается с помощью линии задержки, входящей в состав ГСИ.
При изменении расстояния до цели эхо сигнал переместится относительно стробов. Это приведет к изменению управляющего напряжения, что, в свою очередь, вызовет перемещение стробов, восстанавливающее прежнее, т. е. симметричное, расположение их относительно эхо сигнала.
Информацию о дальности содержит напряжение на выходе интегратора. Так как при сопровождении стробы совпадают с сигналом цели, то представляется возможность работать с нормально запертым приемником, открывая его при помощи этих стробов на короткое время, когда приходит эхо-сигнал. Благодаря этому повышается помехозащищенность РЛС.
Отличительной чертой рассмотренной схемы АСД является наличие в ней одного интегратора. Для нее справедливо уравнение
![]() ,
(3)
,
(3)
где tстр — время задержки стробирующих импульсов относительно зондирующего (см. рис.4);
tD — время задержки эхо-сигнала;
![]() - размерный
коэффициент, 1/сек, определяемый
коэффициентами передачи соответственно
временного различителя (k1),
интегратора (k2)
и устройства регулируемой задержки k3.
- размерный
коэффициент, 1/сек, определяемый
коэффициентами передачи соответственно
временного различителя (k1),
интегратора (k2)
и устройства регулируемой задержки k3.
Если
цель неподвижна, т. е.
![]() ,
,
то, решая уравнение (3.3), получим
![]() .
.
Для этого случая временное рассогласование между стробирующими импульсами и эхо сигналом
![]() .
.
Если коэффициент k > 0, то с течением времени рассогласование уменьшается и через время t≥3/k становится ничтожно малым.
Таким образом, в установившемся режиме АСД с одним интегратором позволяет точно измерять дальность до неподвижного объекта.
В том случае, если цель перемещается с постоянной скоростью (Vр), т. е. если tD=Vрt, то решение уравнения (3.3) можно представить как
![]() .
.
Откуда рассогласование
![]() .
.
Таким образом, система АСД с одним интегратором сопровождает подвижную цель с ошибкой, которая в установившемся режиме достигает величины
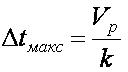
Более совершенные системы АСД содержат два интегратора (рис.6).
Обязательным элементом таких систем является стабилизирующее звено, включенное между первым и вторым интеграторами. Роль такого звена может выполнять цепь, состоящая из сопротивления R и емкости С.
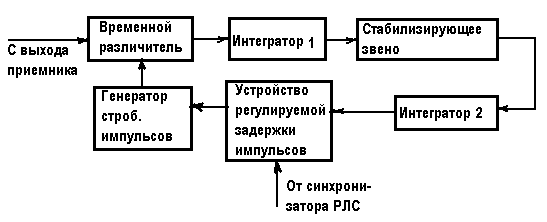
Рис. 6. Функциональная схема системы АСД с двумя интеграторами