

Трубка промахов боеприпаса
Разлет ПЭ на 3600

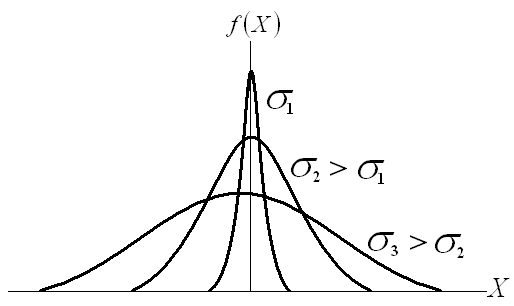
Фактически разлет ПЭ подчинен нормальному (Гауссову) закону:

Математическое ожидание (среднее значение)
![]()
При равновероятном
![]()

![]() , где
, где
![]() - дисперсия (рассеяние) – математическое
ожидание квадрата отклонения величины
от ее математического ожидания равной
- дисперсия (рассеяние) – математическое
ожидание квадрата отклонения величины
от ее математического ожидания равной
![]()
![]() ,
,
откуда
![]() - СКО
- СКО
Изменения плотности
вероятности![]() - в зависимости от СКО
- в зависимости от СКО
![]()

в
68,3% случаев в пределах ±
![]() (X0)
оценки X0
,
(X0)
оценки X0
,
в 95,4% случаев в пределах ± 2 ( X0) оценки X0 ,
в 99,7% случаев в пределах ± З ( XT0) оценки X0 ,
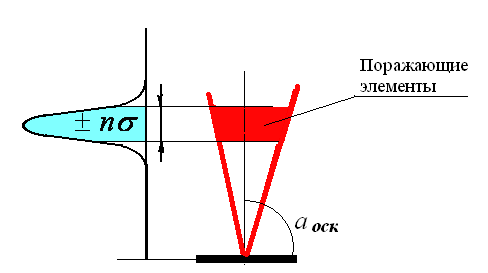
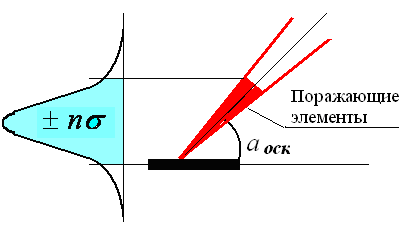
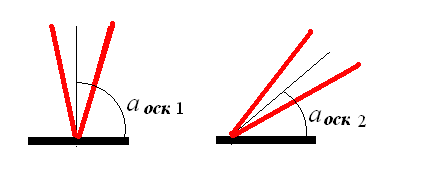

Выбор момента (угла) подрыва БП


![]()
Автономное наведение и самонаведение боеприпаса на цель
Назначение наведения – обеспечение повышенной точности встречи БП с целью для эффективного согласования ОС БП с ОП цели.

Методы наведения (самонаведения)
Исходное положение ракеты и цели

М етод
погони
етод
погони
![]()
М етод
параллельного сближения
етод
параллельного сближения
![]()
Метод пргопорционального наведения
![]()
(при С=1, - метод погони
при С= ∞ - метод параллельного сближения)
М етод
накрытия цели
етод
накрытия цели
![]() для неподвижной цели (например, земной).
для неподвижной цели (например, земной).
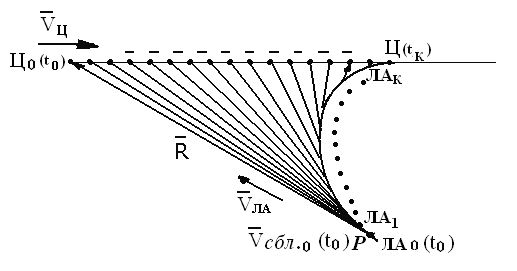
МЕТОД ПОГОНИ (движение по “кривой атаки” )
Вектор
скорости ракеты
![]() - постоянно направлен на цель, т.е.
;
- постоянно направлен на цель, т.е.
;
![]() - угол упреждения.
- угол упреждения.
![]() ;
;
![]() ;
;
![]()
Медленные
цели
![]()
Быстрые
цели
![]()
При
![]() кривизна “k” растет при встрече, т.е.
кривизна “k” растет при встрече, т.е.
![]() При
При
![]() kmax
= ∞
kmax
= ∞

При
![]() ( при стрельбе навстречу, когда
( при стрельбе навстречу, когда
![]() )
)
ракета в конце траектории попадает в хвост цели.
Сначала “k” растет (точка «В»), затем убывает.

Поперечное
ускорение ракеты
![]()
При
![]() kmax
→ ∞ , W
→ ∞ и ракета
«сходит» с траектории в точке «В»
kmax
→ ∞ , W
→ ∞ и ракета
«сходит» с траектории в точке «В»
![]() при которой имеем
при которой имеем
![]() с
допустимым промахом”h”
с
допустимым промахом”h”
![]()
![]()
При
![]() получаем
получаем
![]() и
и
![]() .
.
Максимальный промах
![]()
Т.к.
![]() и
и
![]()

имеем
![]() .
.
Пример
При
![]()
![]()
![]()
ВЫВОД: данный метод пригоден только для медленных целей!
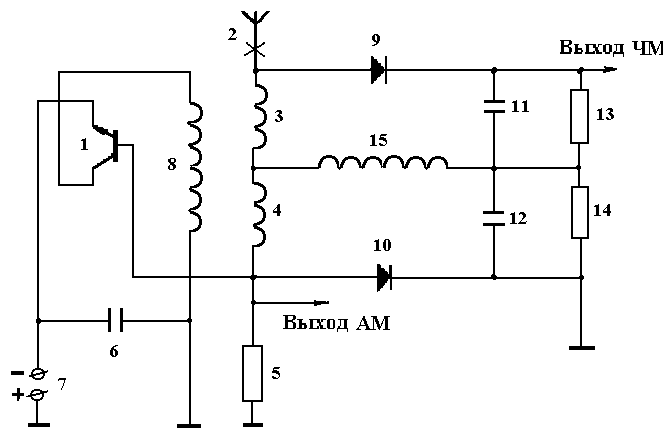
Практическая реализация средствами БРЛ


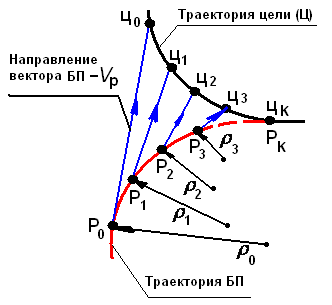
Метод параллельного сближения (пс)
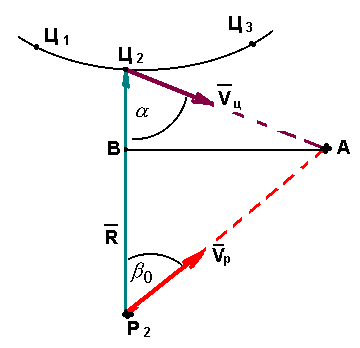
Вектор
![]() в каждый момент направлен в упрежденную
точку, соответствующую этому моменту
времени
в каждый момент направлен в упрежденную
точку, соответствующую этому моменту
времени
![]()
![]()
![]()
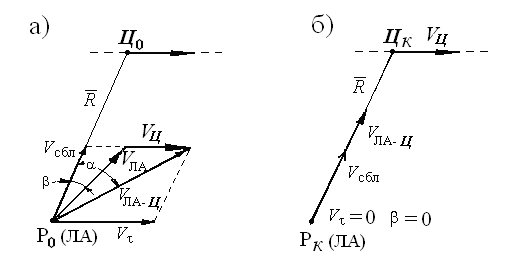
Идеальное упреждение
![]()
![]() -
угол идеального упреждения
-
угол идеального упреждения
Из рис.
![]()
![]() ;
;
![]() ;
;
![]() (1)
(1)
или
![]()

![]() ;
;
![]() ;
;
имеем
![]()
![]() , (2)
, (2)
где
![]()
![]()
![]()
![]()
или
![]() (3)
(3)
C учетом (1) и (3) находим условие движения ракеты по идеальной траектории ПС
![]() или
или
![]() (4)
(4)
При маневре возникает поперечное ускорение
![]() (5)
(5)
где,
как известно,
![]()
Wцп ; Wцк – поперечная и касательная ускорения цели
![]() при
при
![]() (6)
(6)
при этом ускорение
в точке М -
![]()

 (7)
(7)
При
![]()
![]() (8)
(8)
(например: Wцп ≤ 5g, получаем Wр.max≤ 5g)
Вывод: поперечные ускорения, требуемые от ракеты для движения по идеальной траектории ПС не превышает ускорения цели.
Ошибка
упреждения
![]()
![]()
Из (1) и (3) имеем
![]() (9)
(9)
Но
![]()
Т.к.
![]() (малая ошибка)
(малая ошибка)
![]()
Тогда
(9) преобразуется
![]() (10)
(10)
Если
![]() то
то
![]()

![]() (11)
(11)
Ошибка
пропорциональна
угловой скорости
![]()
![]() - параметр
рассогласования (гироскопом)
- параметр
рассогласования (гироскопом)