

4.3. Амплитудная суммарно-разностная арлс
Существенным недостатком рассмотренных моноимпульсных АРЛС является зависимость положения пеленгационного направления от стабильности ряда параметров усилительных трактов. Этот недостаток устраняется в суммарно-разностных системах (рис.9), для которых характерно комбинирование сигналов, принимаемых различными каналами, таким образом, чтобы получить векторную сумму и разность этих сигналов.
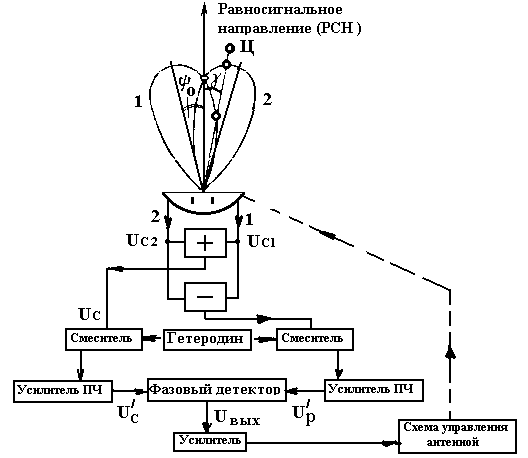
Рис. 9. Моноимпульсная АРЛС с амплитудным
суммарно-разностным методом пеленгации
Антенны каналов приема сигналов устанавливаются так, чтобы характеристики направленности были смещены на некоторый угол φ0 вправо и влево от равносигнального направления.
С выхода антенных входов принятые сигналы подаются на суммирующие и вычитающие устройства.
Сигналы с выхода разностного и суммарного каналов поступают на каскады преобразования и усиления.
Выходным устройством, где вырабатывается сигнал рассогласования, или сигнал ошибки, является фазовый детектор. Сигнал ошибки по величине и знаку соответствует степени и направлению рассогласования линии визирования цели и оси антенной системы, в качестве которой служит равносигнальное направление.
Опорным напряжением на фазовом детекторе является суммарный сигнал u'С, а сигнальным напряжением, которое несет полезную информацию о положении цели, является выходное напряжение разностного канала u'Р.
4.4. Фазовая суммарно-разностная рлс
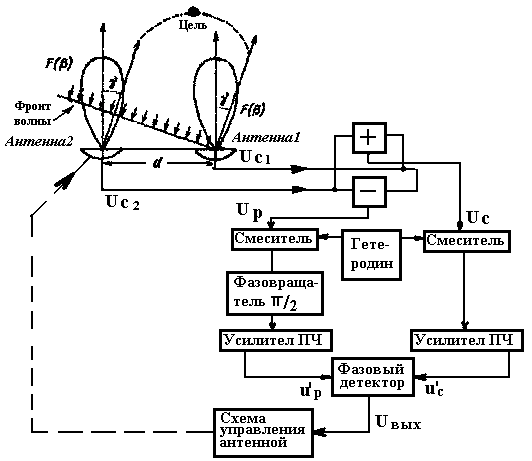
Рис.10. Моноимпульсная АРЛС с фазовым суммарно-разностным методом пеленгации
Полезная информация об угловом положении цели, содержащаяся в фазе сигналов. Для выделения этой информации применяют также фазовый детектор.
Кроме того, в один из каналов вводится сдвиг по фазе на 90°. Для сдвига сигналов по фазе в канале разностного сигнала имеется фазовращатель (рис.10).
На схеме рис.10 сигналы с выхода фазового детектора поступают на схему управления антенной. В процессе сопровождения цели антенна вращается таким образом, что угол рассогласования все время остается равным нулю.
Можно выполнить в рассматриваемом случае и чисто электронное слежение за целью. Для этого необходимо в канал приема на выходе одной из антенн поставить управляемый фазовращатель, который непрерывно компенсировал бы фазу φ так, чтобы на выходе РЛС сигнал все время поддерживался равным нулю.
Так как фаза φ связана с угловым положением цели γ, то величина управляющего сигнала фазовращателя в этом случае соответствует положению цели. Так же как и в фазоразностной системе, для устранения влияния амплитудных колебаний сигнала на сопровождение цели можно и в данном случае ввести ограничение амплитуд.
