

13.3 Тренувальні завдання
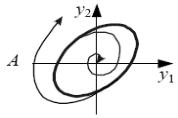
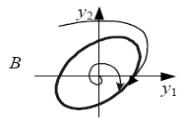
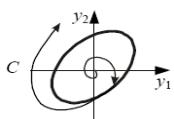
1. Однією з особливостей нелінійних систем є режим автоколивань, які можуть бути стійкими і нестійкими. На фазовій площині режиму автоколивань відповідає замкнута крива, звана граничним циклом. Існують два режими виникнення автоколивань: режим м'якого і режим жорсткого збудження.
А На які питання необхідно відповісти при зміні автоколивань?
В Чим режим м'якого збудження відрізняється від режиму жорсткого збудження?
С Які автоколивання називаються стійкими?
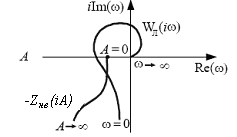
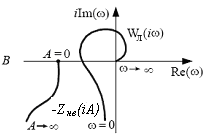
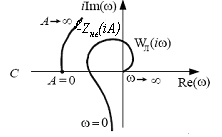
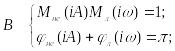
2. Для дослідження режиму автоколивань в системах високого порядку використовується метод гармонійного балансу, що є наближеним методом. Досліджувана нелінійна система повинна бути представлена у вигляді замкнутої системи, що складається з нелінійної частини з АФХ Wл(іω) і нелінійною ланкою з характеристикою уне = f(y), що допускає гармонійну лінеаризацію. Для відповіді на питання про існування в системі автоколивань графічно вирішується рівняння
![]()
Якщо АФХ лінійної частини перетинається з інверсною АФХ нелінійної частини
![]()
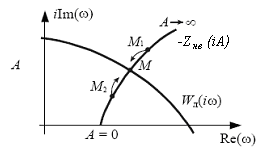
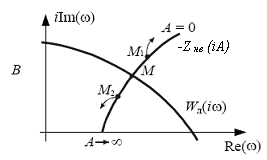
то в системі існують автоколивання, інакше не існують. При існуванні автоколивань визначають їх параметри - частоту і амплітуду і, використовуючи аналог критерію Найквіста, відповідають на питання про стійкість автоколивань.
А Якими властивостями повинна володіти лінійна частина нелінійної системи, щоб можна було застосувати до дослідження режиму автоколивань метод гармонійного балансу?
В Який факт лежить в основі доказу існування в нелінійній системі автоколивань?
С Сформулюйте аналог критерію Найквіста для дослідження стійкості автоколивань.
13.4 Тести
1 В якому з трьох випадків автоколивання стійкі
2 При режимі жорсткого збудження автоколивань утворюються:
А Два граничних цикла кінцевих розмірів, що злипнулися один з одним ;
В Два граничні цикли, один з яких нескінченно малий, а другий має кінцеві розміри;
С Два нескінченно малих граничних цикла.
3. В критерії Бендіксона досліджується вираз:


4. В критерії Бендіксона досліджуваний вираз повинен бути:
А знакозмінним;
В знаковизначеним;
С знакопостійним.
4. Згідно методу гармонійного балансу в нелінійній системі існує режим автоколивань, якщо АФХ лінійної частини і інверсна АФХ нелінійного елементу розташовані таким чином:
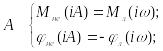
5. Параметри автоколивань визначаються з наступної системи рівнянь:

6. Режим автоколивань стійкий у випадку:
7. Основне рівняння, використовуване в методі гармонійного балансу, має вигляд:
![]()
![]()
![]()
Частина 3. ОПТИМАЛЬНЕ КЕРУВАННЯ ДИНАМІЧНИМИ СИСТЕМАМИ
14.1. Опис систем у просторі станів
Розвиток високоякісних систем керування зажадало розробки нових методів їхнього аналізу і синтезу.
Сучасна теорія керування, основу якої заклали відомі роботи Л.С.Понтрягина, Р.Беллмана й Р.Калмана, базується на описі систем у просторі станів. Опис у просторі станів являє собою загальний погляд на будь-які системи і придатний для дослідження і проектування складних систем з багатьма входами і виходами, тобто багатомірних і багатозв’язних систем. З математичної точки зору аналіз систем у просторі станів означає використання методів матричного вирахуванняі векторного аналізу.
Поняття станує визначальним у сучасній теорії керування.
Під станом системи розуміється мінімально-необхідний набір змінних величин системи x1,x2,...,xn, здатних однозначно і єдиним образомвизначитиположення системи в будь-який момент часу t. Сукупність змінних величин x1,x2,...,xn утворить n-мірний простір станів Rn. Вектор з компонентами x1,x2,...,xn називається вектором стану.
Розглянемо систему (рис.14.1) з m входами (u1,u2,...,um), r виходами (y1,y2,..., yr) і n змінними координатами (x1,x2,...,xn).
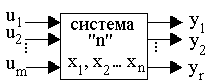
Рис. 14.1. Модель системи
Поводження системи в часі можна характеризувати не тільки вихідними величинами, але й проміжними змінними координатами в ланцюзі системи – зміннимистану xi, число яких дорівнює порядку системи n. Таким чином, виходить n-мірний вектор стану X, безліч можливих положень якого утворить векторний простір, називаний простором станів системи Rn. Величина й положення вектора стану системи із часом t змінюються, у результаті чого вектор X(t) описує криву, називану траєкторією руху системи в просторі станів.
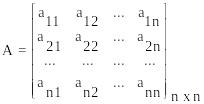
У загальному випадку звичайних лінійних систем, описуваних системою диференціальних рівнянь у нормальній формі, розглянута система може бути визначена наступною векторно-матричною формою
 (14.1)
(14.1)
де X - вектор стану системи, Y - вектор вихідних керованих величин, U - вектор зовнішніх впливів (що задають і що обурюють), а саме:
 ,
,
 ,
,
 ;
;
А, В, C, D - матриці системи.
Система рівнянь (14.1) є стандартним описом систем керування в просторі станів.
Рівняння (14.1) несуть великий обсяг інформації про динамічні властивості системи з m входами й r виходами при t0 t T.
Перше рівняння з (14.1) визначає динамічні характеристики системи і являє собою компактний запис системи n лінійних диференціальних рівнянь, дозволених відносно похідних першого порядку (нормальна форма Коші)
 при
i=1,2, ... ,n,
(14.2)
при
i=1,2, ... ,n,
(14.2)
де aijі bij - постійнікоефіцієнти.
Другерівнянняз (14.1) єрівняннямвиходусистемиіявляєсобоюкомпактнийзаписсистеми r лінійнихалгебраїчнихрівнянь
 приi=1,2,
... ,r,
(14.3)
приi=1,2,
... ,r,
(14.3)
деcijіdij–постійнікоефіцієнти.
Устандартнійформіопису (14.1)
 -
матриця системи;
-
матриця системи;
 -
матриця керування;
-
матриця керування;
 -
матриця спостереження;
-
матриця спостереження;
 -
матриця зв'язку.
-
матриця зв'язку.
Матриця системи A, елементи якої визначаються структурною схемою системи й значеннями її параметрів, характеризує динамічні властивості системи, її вільний рух. Матриця керуванняB характеризує вплив зовнішніх впливів на змінні стану системи, тобто визначає чутливість системи до зовнішніх впливів (що задають і що обурюють). Матриця спостереження C характеризує зв'язок вихідної величини системи з вектором стану. Звичайно не всі складового вектора стану є спостережуваними сигналами, тобто можуть бути обмірювані за допомогою яких-небудь датчиків, у той час як вихідний сигнал завжди спостерігаємо. Матриця зв'язку D встановлює зв'язок вихідної величини системи із зовнішнім впливом.
Таким чином, четвірка матриць A, B, C, D повністю визначає систему керування.
Матричні методи дають можливість звертатися з n рівняннями подібно тому, як це робиться з одним рівнянням.
На рис.14.2 показана структурна схема системи керування, що відповідає стандартній формі опису систем у просторі станів; подвійні лінії на рисунку характеризують векторні зв'язки. Варто мати на увазі, що вибір змінних стану це неоднозначна операція.
Значення початкового стану X(t0) і вхідного впливу U(t) достатні для того, щоб однозначно і єдиним образом знайти вихідну величину Y(t) на інтервалі часу t0 t T, тобто визначити значення Y(t) у сучасний момент і пророчити поводження її в майбутньому.
Таким чином, стандартний опис систем керування в просторі станів дозволяє однозначно визначити вихідну величину системи по відомому зовнішньому впливу й початковому стану системи.

Рис. 14.2. Структурна схема системи у векторній формі:
(∫ - блок інтеграторів; A,B,C,D - блоки матричних підсилювачів
Рівняння змінністану являють собою найбільш повний математичний опис динаміки системи з декількома входами й виходами й дозволяють виробити підхід для рішення різних класів завдань теорії керування з єдиних позицій.