

Н.1 Типова схема визначення координат стінних знаків
С
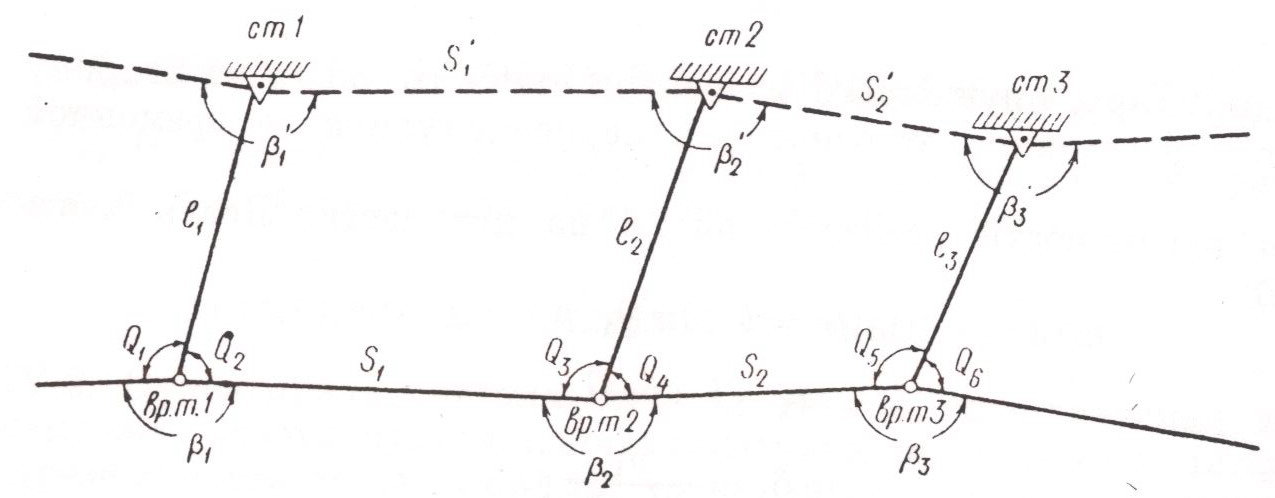
Схема Н.1.2
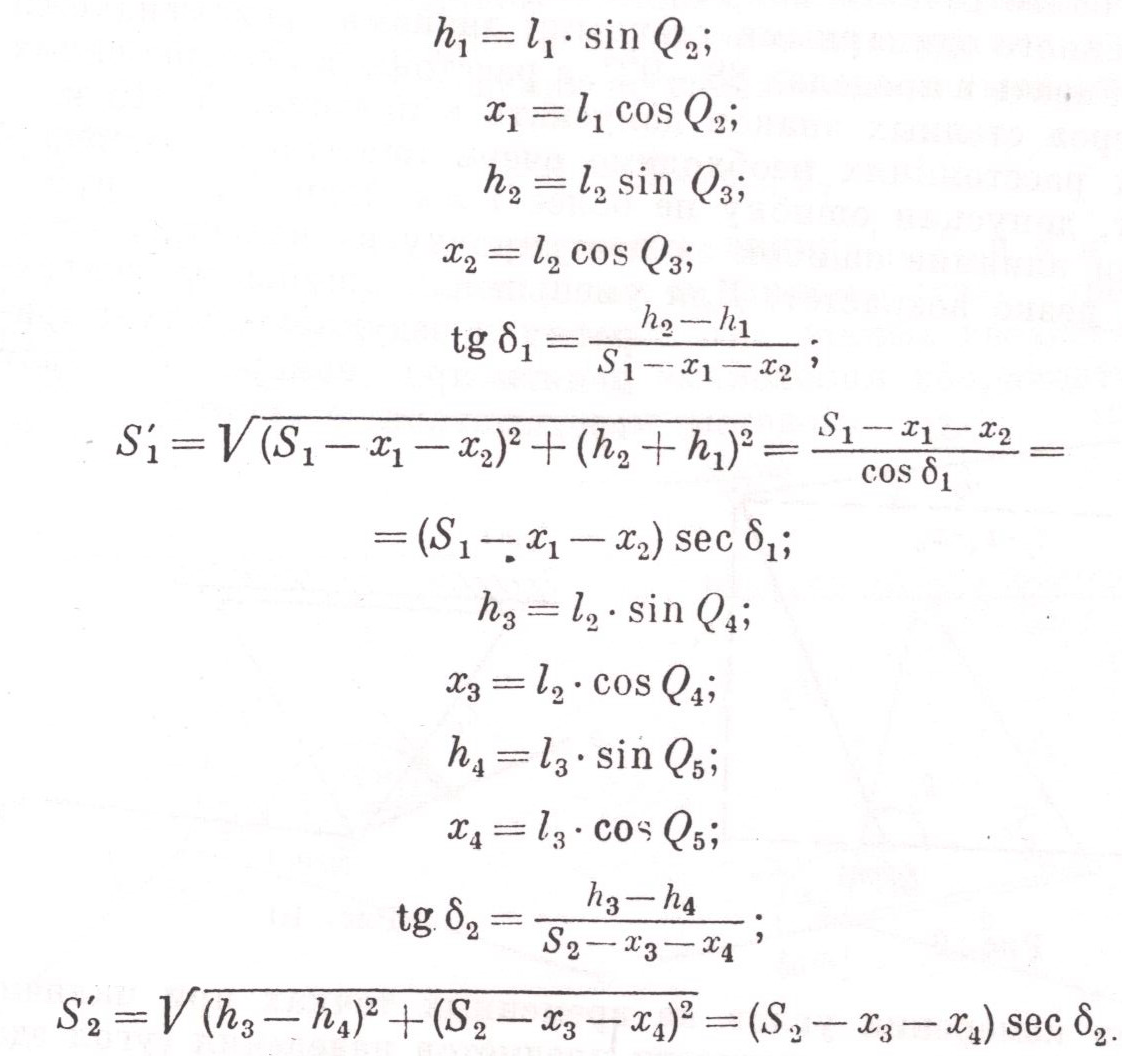
Алгоритм розрахунку Н.1.1
ДОДАТОК О
(інформативний)
АЛГОРИТМ ПАРАМЕТРИЧНОГО МЕТОДУ ВИРІВНЮВАННЯ ГЕОДЕЗИЧНИХ МЕРЕЖ
О.1 Вирівнювання лінійно-кутових спостережень на пунктах геодезичних мереж
Вирівнювання лінійно-кутових спостережень на пунктах геодезичних мереж об’єкту повинно виконуватись параметричним методом з урахуванням похибок вихідних даних.
Сукупність кутових і лінійних вимірів у планових мережах зв'язана системою з n рівнянь поправок:
Ax - L = V, (О.1.1)
де
V |
|
A |
|
x |
|
L |
|
k |
|
n |
|
Розв’язання системи рівнянь по методу найменших квадратів приводить до рішення системи нормальних рівнянь:
Ф = vTPv = mіn . (О.1.2)
AТPAx – AТPL = 0, (О.1.3)
де
P - діагональна матриця ваг вимірів.
Діагональна матриця ваг вимірів має вигляд:
P = P1, P2 , P3, ... Pn, Ps1, Ps2, Ps3,... Psns . (О.1.4)
Рішення системи нормальних рівнянь має вигляд:
x = (ATPA)-1 ATPL. (О.1.5)
Оцінка точності результатів вирівнювання забезпечується обчисленням кореляційної матриці:
K = 20 Q : Q = (ATPA)-1, (О.1.6)
де
Q - зворотна матриця системи нормальних рівнянь;
0 - середня квадратична помилка одиниці ваги.
Обчислення середніх квадратичних помилок всіх вирівняних елементів виконується по формулі:
m2F = 20 f Q fT , (О.1.7)
де
f - матриця коефіцієнтів вагової функції.
Надається можливість уточнення попередніх значень координат визначаємих пунктів і ваг різнорідних вимірів шляхом організації
ітераційних процесів. При цьому початкові значення елементів матриці P установлюються відповідно до заданих величин.
З рішення нормальних рівнянь обчислюються чергові значення поправок до координат визначаємих пунктів. Значення вектора поправок x підставляється в рівняння поправок і обчислюється вектор поправок у виміряні величини v. За значеннями m визначаються нові значення елементів матриці P:
P = c / m2 ; Ps = c / m2s , (О.1.8)
m2 = vT P vT / n ; m2s = vTs Ps vT / ns , (О.1.9)
де
m - середня квадратична похибка вимірювання напрямків;
ms - середня квадратична похибка обмірюваних ліній;
n - кількість виміряних напрямків;
ns - кількість виміряних ліній.
Середня квадратична похибка одиниці ваги обчислюється за формулою:
20 = vTPv / (n - k). (О.1.10)
За результатами розрахунку складається нова система нормальних рівнянь і виконується нова ітерація. Критерієм закінчення ітераційного процесу є збіжність середньої квадратичної похибки одиниці ваги 0 між ітераціями.