

2.4 Геометрическая интерпретация решения злп.
Графический метод решения ЗЛП состоит из следующих этапов:
На координатной плоскости Х1ОХ2 строится область допустимых решений (ОДР). Она представляет собой многоугольник, стороны которого лежат на прямых, получаемых из системы ограничений задачи.
Строится вектор нормали q = (С1,С2) целевой функции (он указывает на направление возрастания целевой функции).
Строятся нижние и верхние опорные прямые, т.е. крайние линии уровня целевой функции, имеющие общие точки с ОДР. (Путем параллельного перемещения опорной прямой в направлении вектора нормали q).
Определяются координаты экстремальных точек и вычисляются значения целевой функции в них.
Пример 2.3
Решить графическим методом следующую задачу:
х 1
+ 3х2 ≤ 21
1
+ 3х2 ≤ 21
3х1 + 2х2 ≤ 21
3х1 + х2 ≤ 18
х1; х2 ≥ 0
Определить при каких х1 и х2 функция F = 30х1 +60х2 → max
Р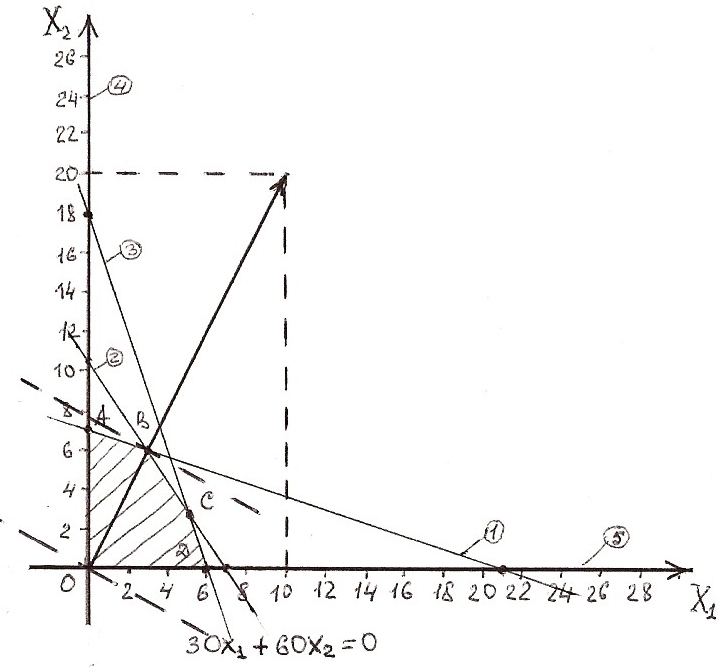 ешение.
ешение.
Область допустимых решений построим следующим образом. Постоим прямые с уравнениями
Х1 |
0 |
21 |
Х2 |
7 |
0 |
Х1 |
0 |
7 |
Х2 |
10,5 |
0 |
Х1 |
0 |
6 |
Х2 |
18 |
0 |
4) х1 = 0
5) х2 = 0
Прямые пронумерованы, а рядом с соответствующим уравнением приведены координаты двух точек, через которые проходят прямые.
В результате получим выпуклый пятиугольник ОАВСD.
2. Строим нормальный вектор q = (30;60)/ 3, уменьшив значение координат в 3 раза. Прямая с уравнением 30 х1 + 60 х2 = 0 представляет собой «нулевую» линию уровня целевой функции. Эта прямая проходит через начало координат и перпендикулярна нормальному вектору q. Передвигаем эту прямую параллельно себе по вектору q и фиксируем ее крайнее положение (т.В).
3. Определим координаты точки В, которая принадлежит прямым 1) и 2).
Составляется система уравнений:
х 1
+ 3х2 = 21 х1 = 3; х2 = 6
1
+ 3х2 = 21 х1 = 3; х2 = 6
3х1 + 2х2 = 21
Тогда F max =30∙3 + 60∙6 = 450
При минимизации F = 30 х1 + 60 х2 линию уровня необходимо смещать параллельно самой себе в направлении противоположном вектору q. Минимум функции достигается в точке О(0;0).
Тогда F min = 0.
К достоинствам геометрического метода решения ЗЛП относятся:
- наглядность;
- быстрота и легкость нахождения ответа.
К недостаткам геометрического метода относятся:
- возможны «технические» погрешности при приближенном построении графиков;
- многие величины, имеющие четкий экономический смысл (остатки ресурсов производства, избыток питательных веществ и т.п.) не выявляются;
- этот метод легко применим, когда число переменных в стандартной задаче не превышает двух.