

Вопрос 3. Критерий устойчивости Михайлова
Характерной особенностью данного метода является то, что об устойчивости системы судят по поведению годографа Михайлова исследуемой системы:
 -
для разомкнутой системы;
-
для разомкнутой системы; -
для замкнутой системы.
-
для замкнутой системы.
Под
годографом
понимается кривая, которую описывает
конец вектора
или
на комплексной плоскости при изменении
от 0 до
 .
Здесь
.
Здесь
 и
и
 - полиномы знаменателей соответствующих
передаточных функций.
- полиномы знаменателей соответствующих
передаточных функций.
На основании принципа аргумента формулируется критерий Михайлова:
Для
устойчивости системы необходимо и
достаточно, чтобы годограф вектора
Михайлова
 для замкнутой и
для разомкнутой системы) при изменении
от 0 до +
повернулся в положительном направлении
на угол (/2)n
или, иначе, пересек по очереди n
квадратов без пропусков.
для замкнутой и
для разомкнутой системы) при изменении
от 0 до +
повернулся в положительном направлении
на угол (/2)n
или, иначе, пересек по очереди n
квадратов без пропусков.
 Все
эти годографы (и системы соответственно)
устойчивы.
Все
эти годографы (и системы соответственно)
устойчивы.
Эти системы неустойчивы, так как вектор годографа Михайлова вращается в отрицательном направлении.
 Система
неустойчива, так как квадранты проходятся
непоследовательно.
Система
неустойчива, так как квадранты проходятся
непоследовательно.
Система находиться на границе устойчивости. При подсчете порядка системы каждое прохождение годографа через 0 повышает порядок на 1.
Следствие из критерия Михайлова:
Для устойчивости системы необходимо и достаточно, чтобы корни мнимой и вещественной частей годографа Михайлова перемежались.
Если корни не перемежаются, то система неустойчива.
Если
характеристическое уравнение
 не имеет какого либо члена, то система
также неустойчива.
не имеет какого либо члена, то система
также неустойчива.
Теорема (критерий Михайлова). Для устойчивости САУ необходимо и достаточно, чтобы годограф Михайлова, начинаясь при ω=0 на действительной оси, с увеличением ω от 0 до ∞ обходил последовательно в положительном направлении (против часовой стрелки) n квадрантов, где n – порядок характеристического уравнения.
На рисунке 2, а приведены годографы Михайлова для устойчивых систем при различных значениях n. Пунктиром показана часть годографа при изменении ω от -∞ до 0 для n=5. На рисунке 2, б – те же годографы для неустойчивых САУ.
|
|
а |
б |
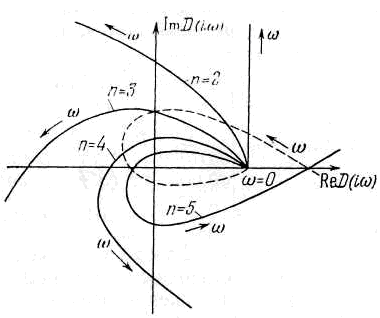
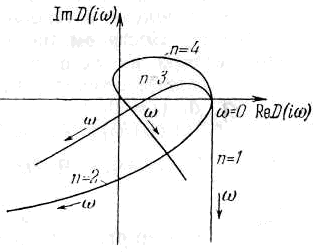
Рисунок 2
Определение типа границы устойчивости по виду годографа Михайлова

Астатизм первого порядка - "апериодическая" граница устойчивости.
Астатизм второго порядка - "апериодическая" граница устойчивости.
"Колебательная" граница устойчивости.
Граница устойчивости типа "бесконечный корень".
Вопрос 4. Использование микропроцессорной техники в системах автоматического управления.
Применение микропроцессоров в системах автоматического управления обусловлено их программируемостью, значительной вычислительной мощностью и высокой надежностью в сочетании с малыми габаритами и невысокой стоимостью.
Программируемость микропроцессоров позволяет осуществлять гибкую оперативную перестройку алгоритма работы системы автоматического управления и ее структуры.
Изменения, вносимые в систему, как правило, обеспечиваются заменой одной большой интегральной схемы (БИС) памяти на другую.
Микропроцессором называется программно-управляемое устройство обработки данных с заданной системой команд, выполненное на одной или нескольких БИС, входящих в состав микропроцессорного комплекта (МПК).
МПК представляет собой совокупность совместимых микропроцессорных и других интегральных микросхем.
Микропроцессорная БИС – это интегральная микросхема, выполняющая функцию микропроцессора или его части.
Преимуществом использования микропроцессоров в системах управления является их высокая отказоустойчивость.
Отказоустойчивость определяется как способность системы сохранять свою работоспособность при возникновении в ее блоках разнообразных отказов. Отказоустойчивость обеспечивается введением в систему аппаратной, программной и информационной избыточности.
Для оперативного контроля и диагностики используется встроенный программно-аппаратный контроль, который осуществляется за счет использования в системе недорогих дополнительных ресурсов.
Получили распространение системы с резервированием, системы с программной реконфигурацией структуры и системы с использованием самокорректирующихся кодов.
Микропроцессорные системы управления позволяют реализовать распределенное управление в реальном масштабе времени.
Микропроцессор может рассматриваться как универсальное программно-управляемое устройство обработки информации, включающее в себя:
операционное устройство, обеспечивающее обработку информации в соответствии с выполняемой командой;
управляющее устройство, которое осуществляющее синхронизацию вычислительного процесса;
интерфейсные блоки, обеспечивающие взаимодействие микропроцессора с другими модулями системы.
Кроме того, микропроцессор может включать в себя дополнительные блоки, увеличивающие производительность и функциональные возможности, такие, как диспетчер памяти, расширяющее адресное пространство; расширитель арифметики, реализующий сложнейшие арифметические команды; блок управления очередностью команд и др.
Достижения в области технологии полупроводниковых больших интегральных схем (БИС) обеспечили повышение уровня интеграции на кристалле. Это способствовало появлению не дорогих и надежных ЭВМ, позволяющих не только создавать на их основе АСУ тез-ми процессами произ-ва в целом с централизованным управлением на верхнем уровне иерархии, но и перейти к децентрализованным (распределенным) АСР с заменой традиционных аналоговых регуляторов микроконтроллерами и микропроцессорами. Для понимания принципа работы и сущности происходящих процессов в распределенных системах управления с использованием ЭВМ необходимо знать основные понятия и определения устройств вычислительной техники.
Микро-ЭВМ представляет собой конструктивно завершенное вычислительное устройство вычислительное устройство, реализованное на базе микропроцессорного набора БИС и оформленному в виде автономного прибора со своим источником питания и комплексом программного обеспечения.
Микроконтроллер устройство логического управления, выполненное на основе одной или нескольких микропроцессорных БИС. Микроконтроллер м.б. как программируемым, так и не программируемым. Иногда такое устройство называют контроллером.
Связь м/у устройством ЭВМ осуществляется на основе интерфейсов. Под интерфейсом понимается совокупность унифицированных технических программных и конструктивных средств, необходимых для реализации взаимодействия различных функциональных устройств ЭВМ при условиях, предписанных стандартом.
Бит – единица информации, представленной в двоичном(0 или 1) коде ЭВМ. Во всех ЭВМ для кодирования одного знака алфавитно-цифровой информации достаточной является разрядность, равная 8 бит, расположенная в двух тетрадах по 4 бит в каждой. Такая строка из 8 двоичных символов наз-ся байтом.
Развитие технологии БИС и увеличение степени интеграции в полупроводниковом кристалле до 10-30 тыс. компонентов сделало возможным реализовать в одном кристалле ни только микропроцессор, но и всю схему микро-ЭВМ, выполняющую несложные функции и требующую небольших объемов памяти (до 2кбайт) и не сложных схем каналов ввода-вывода (32 канала).
Микроконтроллер своей функциональной и алгоритмической возможности могут заменить группу из 1050 обычных аналоговых регуляторов, используемых в системах регулирования тех-х процессов.
В современных системах управления, где на нижних уровнях иерархии для управления техно-ми процессами используются аналоговые электрические или пневматические регуляторы для обеспечения надежности сохраняется одноконтурный принцип управления. Однако экономически не целесообразно в каждом контуре ставить свой микроконтроллер.
Поэтому вместо одноконтурного микропроцессорного управления применяют многоконтурные микропроцессорное управление, обеспечивающее управление несколькими (10-50) контурами.
Но для того чтобы снизить надежность управления, предусматривается резервный микрокон-р либо переход на резервное ручное правление. Итак, система регулирования с применением ЭВМ называется распределенной в том случае, когда регулирование параметров тех-го процесса осущ-ся не централизованно от этой ЭВМ, а с помощью микропроцессорных устройств (микроконтроллеров).