

Вопрос 5. Характеристика адаптивных систем управления.
1. Автоматические системы регулирования, в которых управляющие воздействия вырабатываются по принципу сравнения текущего значения управляемой величины с заданным значением. Такие системы имеют постоянную настройку регуляторов.
2. Автоматические системы поиска, целью управления которых является отыскание и поддержание управляющих воздействий, соответствующих экстремальному или оптимальному значению управляющей величины. Автоматические системы поиска называются адаптивными или самоприспосабливающимися, так как они обладают способностью приспосабливаться к изменению внешних условий и свойств объекта, обеспечивая при этом заданное качество управления.
В поисковых системах управляющее воздействие формируется на базе использования пробных управляющих воздействий и их анализа или на базе использования дополнительного автоматического устройства, способного изменять алгоритм управления основного управляющего устройства в зависимости от изменения внешних условий или свойств объекта.
Как правило, алгоритмом функционирования адаптивной системы предусматривается оптимизация показателя качества управления или качественного показателя управляемого процесса.
Автоматическое управляющее устройство состоит из основного и дополнительного блоков. В дополнительном блоке вырабатывается корректирующее управляющее воздействие на базе анализа информации об управляемой величине на выходе из объекта и основном управляющем, задающем и возмущающем воздействиях.
Условия работы реальных систем управления часто таковы, что характеристики входных сигналов и помех либо известны неточно, либо существенно изменяются во времени. Определенным случайным изменениям могут быть подвержены также параметры самих систем управления, особенно аналоговых. Поэтому качество работы системы управления, спроектированной в расчете на неизменяющиеся условия работы, на практике может оказаться существенно ниже ожидаемого. Избежать этого позволяет применение адаптивных систем, параметры или даже структура которых при изменении внешних условий автоматически изменяются, поддерживая тем самым близкий к оптимальному режим работы.
Адаптивные системы с перестройкой только параметров называют самонастраивающимися, с перестройкой структуры – самоорганизующимися.
Самонастраивающиеся системы обычно содержат, кроме основной системы управления, устройство для оценки наилучших параметров. Упрощенная схема самонастраивающейся системы приведена на рис.
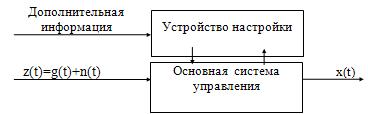
Кроме сигналов, поступающих от основной системы, в устройстве настройки параметров может быть использована также дополнительная полезная информация о ходе процесса управления.
Самонастраивающиеся системы классифицируют по различным признакам. Например, по способу получения исходной информации для настройки параметров системы классифицируют на самонастраивающиеся:
– по сигналам внешних воздействий;
– по динамическим характеристикам объектов;
– по сигналам внешних воздействий и динамическим характеристикам (комбинированные).
Самонастраивающиеся системы разделяют, кроме того, на разомкнутые и замкнутые относительно контура самонастройки и выхода системы, а также на аналитические, поисковые, комбинированные, с активной и пассивной самонастройкой и т.д.
Имеется существенное различие между настраиваемыми и самонастраивающимися системами. Зная общие характеристики объекта, а также их зависимость от окружающих условий, можно ввести в систему соответствующую программу, которая произведет необходимую настройку регулятора. При этом получается система программной настройки. Самонастраивающаяся система не требует полной информации обо всех данных и при изменении внешних условий ее параметры автоматически настраиваются, обеспечивая заданные показатели качества. Для обнаружения отклонения параметров объекта от оптимальных в самонастраивающихся системах используются различные средства, например, организация автоматических пробных движений системы с последующим анализом исходной и вырабатываемой информации. Автоматический поиск является наиболее характерным признаком самонастраивающихся систем. В качестве пробных движений в ряде случаев используют имеющиеся в системе случайные изменения состояния.
Элементы самонастройки вводят в систему, если закон изменения характеристик объекта во времени неизвестен, а разовая или программная настройка не позволяет получить желаемое качество работы системы.
Для обеспечения самонастройки широко применяются вычислительные средства, корректирующие устройства с изменяемыми параметрами, регуляторы с изменяющимися параметрами и др.
Самонастраивающиеся системы являются, прежде всего, динамически устойчивыми системами, работающими по принципу измерения отклонения регулируемой переменной или с использованием комбинированного принципа регулирования. Такие системы имеют следующие характерные черты:
- наличие не менее двух контуров – основного и самонастройки;
- наличие элементов с изменяющимися параметрами;
- наличие вычислительных средств;
- повышенная чувствительность к изменению параметров системы и входных сигналов;
- использование случайных сигналов для осуществления автоматического поиска экстремума.
Для раскрытия содержания термина адаптивность в теории управления необходимо рассмотреть основные типы управляющих систем.
При моделировании процессов управления обычно рассматривают три типа управления:
открытое, или разомкнутое,
замкнутое, или управление с обратной связью, и
адаптивное.
Структура адаптивного управления.

С термином адаптация связаны понятия адаптивного управления, адаптивной системы и адаптивной модели.
Адаптация - это процесс изменения параметров и структуры системы, а возможно, и управляющих воздействий на основе текущей информации с целью достижения определенного, обычно оптимального, состояния системы при начальной неопределенности в изменяющихся условиях работы [4, 5].
Адаптивной считают систему, которая может приспосабливаться к изменениям внутренних и внешних условий [4,6]. Адаптивная система сохраняет работоспособность при непредвиденных изменениях свойств управляемого объекта, целей управления или окружающей среды путем смены алгоритма своего функционирования, программы поведения или поиска оптимальных состояний.
Понятие управления с адаптацией (адаптивное управление) - это управление в системе с неполной априорной информацией об управляемом процессе, которое изменяется по мере накопления информации и применяется с целью улучшения качества работы системы.
Адаптивной моделью системы управления объектом считают такую модель, в которой в результате изменения характеристики внутренних и внешних свойств объекта происходит соответствующее изменение структуры и параметров регулятора управления с целью обеспечения стабильности функционирования объекта.
Невозможность точной математической формализации структуры объекта, погрешность измерений, отсутствие достоверной информации о начальных координатах, наличие непредсказуемых внешних воздействий предопределяет необходимость реагирования управляющих воздействий на изменения параметров объекта и характеристик внешней среды. Такого рода адаптация (приспособление) происходит путем изменения структуры и параметров регулятора.
Конкретизация определения адаптации связана с целями исследования и конструирования. Таким образом, основное свойство адаптивных систем - реализация цели управления в условиях недетерминированной внешней среды и изменяющихся параметров объекта.