

Нормы времени на 1 т-км при работе на автомобилях I группы (бортовые автомобили и автомобили-фургоны общего назначения)
Грузоподъемность автомобиля, т |
Норма времени, мин |
|||
В городе |
Вне города по группам дорог |
|||
А |
Б |
В |
||
0,8 |
6,00 |
3,06 |
4,05 |
5,36 |
1,0 |
4,80 |
2,45 |
3,24 |
4.28 |
2,0 |
2,40 |
1,22 |
1,62 |
2,14 |
2,5 |
1,92 |
0,98 |
1,30 |
1.71 |
3,0 |
1,60 |
0,82 |
1,08 |
1,43 |
3,5 |
1,37 |
0,70 |
0,93 |
1,22 |
4,0 |
1,20 |
0,61 |
0,81 |
1,07 |
Окончание табл. 2 П.4
4,5 |
1,07 |
0,54 |
0,72 |
0,95 |
5,0 |
0,96 |
0,49 |
0,65 |
0,86 |
6,0 |
0,80 |
0,41 |
0,54 |
0,71 |
7,0 |
0,71 |
0,35 |
0,46 |
0,61 |
7,5 |
0.67 |
0.33 |
0,43 |
0,57 |
8,0 |
0,62 |
0,31 |
0,40 |
0,54 |
9,0 |
0,56 |
0,27 |
0,36 |
0,48 |
10,0 |
0,50 |
0,24 |
0,32 |
0,43 |
11,5 |
0.43 |
0,21 |
0,28 |
0,37 |
12,0 |
0,42 |
0,20 |
0,27 |
0,36 |
14,5 |
0,34 |
0,17 |
0,22 |
0,30 |
16,6 |
0,30 |
0,15 |
0,20 |
0,26 |
20,0 |
0,25 |
0,12 |
0,16 |
0,21 |
25,0 |
0,20 |
0,10 |
0,13 |
0,17 |
Таблица 3 П.4
Нормы времени на 1-ткм при работе на автомобилях II группы
(специализированных)

Окончание табл. 3 П.4

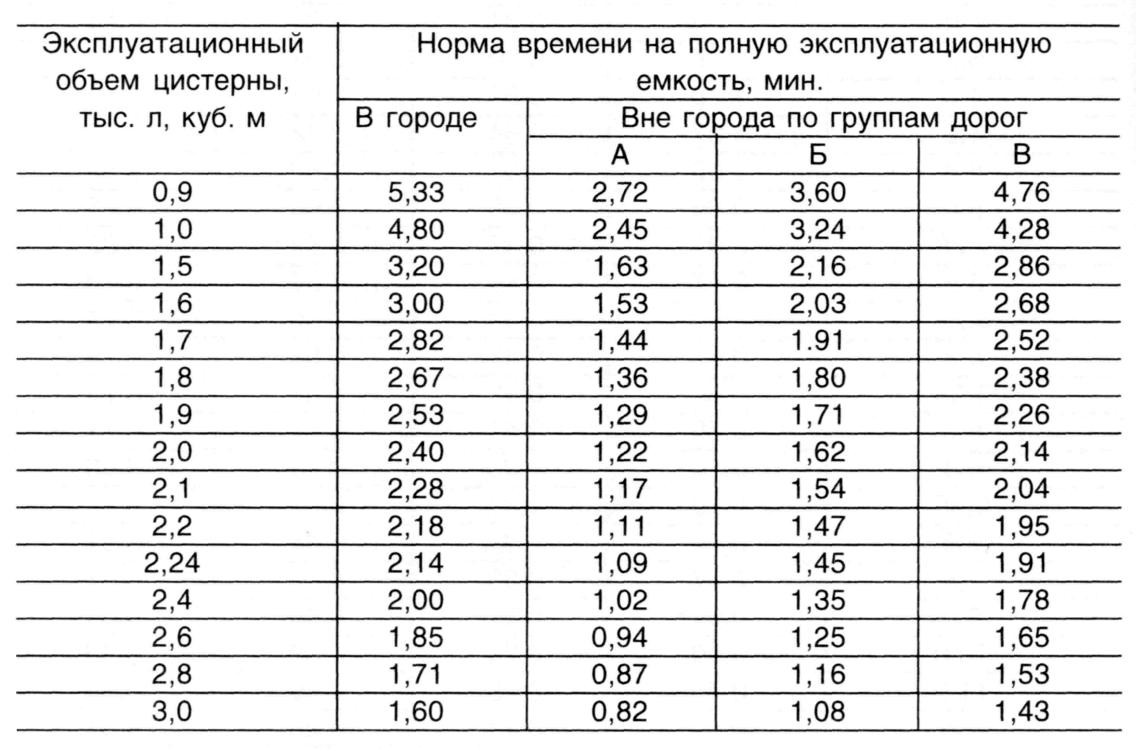
Таблица 4 П.4
Нормы времени на 1 т-км при работе автомобилей-цистерн
Окончание табл. 4 П.4

Приложение 5
Выбор и механизация погрузочно-разгрузочных работ
Классификация подъемно-транспортных машин облегчает подбор средств механизации на действующих объектах, а также их выбор при проектировании новых предприятий, при подборе подъемно-транспортных механизмов, работающих в закрытых помещениях. Принципы классификации таковы: по степени участия в подъемно-траспортных процессах, по назначению, по типу, по подтипу.
По степени участия в процессах перемещения подъемно-транспортные средства подразделяются на оборудование и оснастку.
Подъемно-транспортные средства, имеющие одно целевое назначение, различаются по типу и подтипу. Деление на подтипы отражает конструктивные различия, а также различия по способу перемещения груза, по приводу или другим признакам. В таблице приложения приведено различие подъемно-транспортных средств по подтипам лишь для более распространенных типов. Грузоподъемность каждого подъемно-транспортного средства представлена от минимальной до максимально возможной, определяемой техническими характеристиками. Интервалы грузоподъемности определены на основе этих характеристик.
Выбор подъемно-транспортных средств из нескольких типов, относящихся к одной группе, осуществляется, прежде всего, исходя из расстояния транспортирования, в других случаях могут учитываться конструктивные особенности подъемно-транспортных средств, другие соображения.
Для работы на открытых площадках используются следующие подъемно-транспортные механизмы:
Краны – относятся к механизмам прерывного действия. Цикл работы состоит из:
-рабочего цикла – захват, закрепление, подъем, перемещение, опускание и освобождение грузозахватных приспособлений;
-подготовительного – подъем грузозахватных приспособлений, перемещение и опускание в исходное положение.
Краны бывают мостовые, портальные автомобильные, самоходные - колесные, гусеничные, стационарные.
Погрузчики и автопогрузчики с ДВС применяются на открытых площадках, электрические – внутри.
Для маневра – передние ведущие, задние – управляемые. Выпускаются грузоподъемность от 1 до 200 т. при пользовании вилочным захватом и высотой от 4 до 7 м. Скорость 18-40 км/ч. Электропогрузчики имеют меньшую грузоподъемность (0,25-1,5 т), меньшие габариты и лучшую маневренность (в вагонах, кузове).
Транспортеры-механизмы с рабочим органом непрерывного действия бывают в зависимости от типа рабочего органа – ленточные, пластинчатые, скребковые, винтовые.
Экскаваторы имеют рабочее, силовое и ходовое оборудование. По рабочему процессу они делятся на: а) прерывистого действия – одноковшовые; б) непрерывного действия – многоковшовые.
По способу перемещения – колесные, гусеничные, шагающие.
По типу рабочего органа:
с прямой лопатой – для рытья котлованов перемещения груза выше места нахождения экскаватора;
с обратной лопатой – для рытья небольших котлованов, траншей, канав, расположенных ниже места нахождения экскаватора;
драглайны – скребковый ковш – для разработки выемок, насыпей, иногда с погрузкой в подвижной состав.
Одноковшовые погрузчики – механизмы с рабочим органом – ковшом периодического действия. Вместимость – 0,5-4 м3. Производительность ковшевых погрузчиков большая – 200 т/ч, поэтому их применяют при крупных объемах погрузочных работ.
Многоковшовые погрузчики называются элеваторами, имеют рабочий орган непрерывного действия, представляющий собой бесконечные цепи с укрепленными ковшами и подгребающий питатель в виде шнека или лопаты.
Таблица 1 П.5