Стійкість стиснутих стержнів
11.3 Поняття про стійкі і нестійкі форми рівноваги
З теоретичної механіки відомо, що рівновага твердих тіл може бути стійкою, нестійкою та байдужою. Так, на рис. 11.4 а, 11.4 б, 11.4 в положення рівноваги кульки відповідно стійке, нестійке і байдуже. На відміну від форм рівноваги абсолютно твердого тіла, які залежать лише від його положення, форми рівноваги реальних деформованих тіл залежать від їх матеріалу, форми, співвідношення розмірів і величини прикладених сил.
Розглянемо рівновагу прямого стержня, який стискається силою F. До певної величини стискаючої сили F стержень, відхилений від вертикального положення силою Q, під дією внутрішніх сил повертається у початковий стан, якщо силу Q усунути; це означає, що його прямолінійна форма рівноваги є стійкою (рис. 11.5 а). Коли сила F досягає критичного значення, яке ми позначимо через Fкр, стержень, виведений із прямолінійної форми, може повернутися до неї, але може також залишитися злегка зігнутим, коли сила Q перестала діяти (рис. 11.5 б). Якщо F > Fкр , прямолінійна форма рівноваги не зберігається, стержень сильно скривлюється і набуває нової, криволінійної форми рівноваги (рис. 11.5 в) або руйнується.
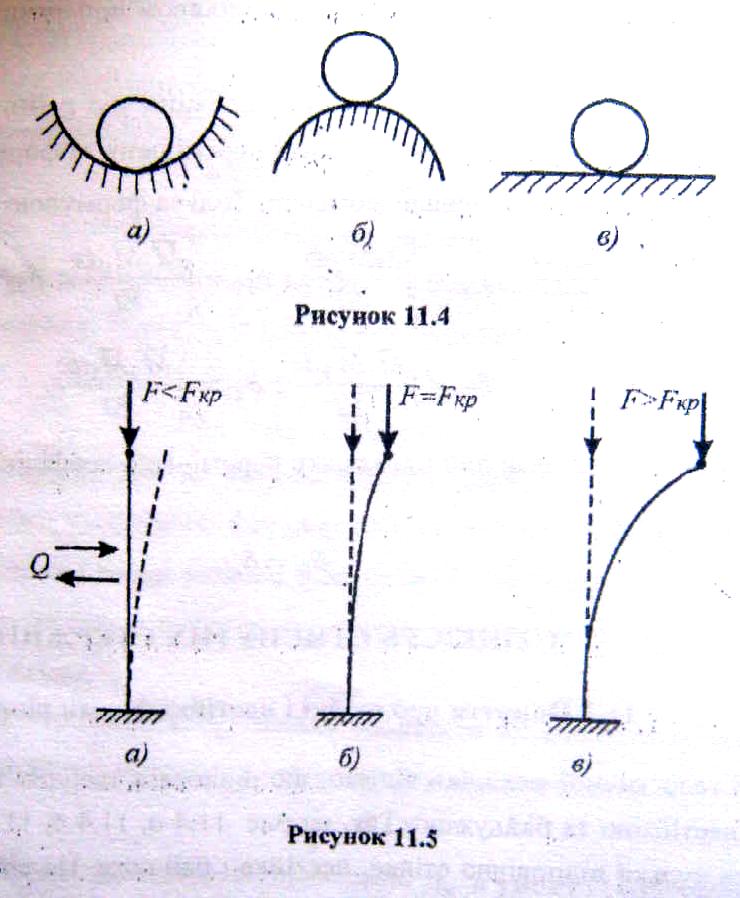
Отже, критичною силою для прямого стержня ми називаємо ту найменшу стискуючу силу Fmin, прямолінійна форма рівноваги стержня стає нестійкою.
При
розрахунку на стійкість критична сила
аналогічна руйнуючій при розрахунку
на міцність. Щоб забезпечити стійкість,
необхідно, щоб F
Тут

де
 - допустимий коефіцієнт запасу стійкості.
- допустимий коефіцієнт запасу стійкості.
Лекція 12
12.1 Визначення критичної сили за формулою Ейлера
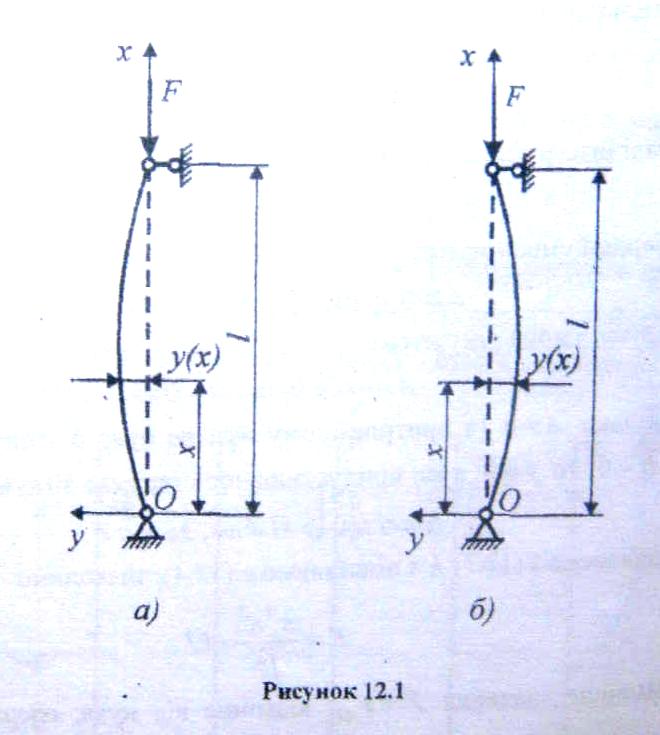
Для розрахунків стиснених стержнів на стійкість треба знати способи визначення критичної сили F^. Розглянемо стиск стержня силою F, величина якої трохи більше, ніж Fкр і стержень знаходиться у злегка зігнутому стані (рис. 12.1 а).
Диференціальне рівняння зігнутої осі стержня маг вигляд
 (12.1)
(12.1)
Так як абсолютна величина згинального моменту

а знак прогину у і другої похідної у" завжди протилежні, то рівняння (12.1) мас вигляд
 (12.2)
(12.2)
Зауважимо, що незалежно від того, куди зігнеться стержень: вліво (рис. 12.1 а) або вправо (рис. 12.1 б) і незалежно від вибору осі у, диференціальне рівняння завжди має вигляд (12.2).
Запишемо (12.2) у вигляді
 =0
=0
або
 (12.3)
(12.3)
де
 (12.4)
(12.4)
Загальний розв'язок цього однорідного лінійного диференціального рівняння записується, як відомо, так:
 (12.5)
(12.5)
Сталі інтегрування А і В визначаємо з граничних умов
y(0)=0; y(l)=0
З першої умови маємо

З другої умови одержуємо
 (12.6)
(12.6)
Оскільки
А≠0
(в протилежному разі не було б згину
стержня, бо якщо A
= 0 і B
= 0, то у
 0, а ми припустили, що стержень зігнувся),
то
0, а ми припустили, що стержень зігнувся),
то
 (12.7)
(12.7)
Визначаємо з (12.7) к і підставимо в (12.4), знаходимо
F=
 (12.8)
(12.8)
Найменше значення F=Fкр відмінне від нуля, одержимо з (12.8) при
I=Imin і n=1. Тоді
 (12.9)
(12.9)
Формула (12.9) вперше була одержана Ейлером у 1744 р. і називається формулою Ейлера для критичної сили для стержня з шарнірним закріпленням кінців. Значенню F = Fкр відповідає зігнута вісь стержня у вигляді півхвилі синусоїди (рис. 12.1 а) з рівнянням
 (12.10)
(12.10)
Найбільший прогин стержня утах = А при х=l/2. Отже, А — це найбільший прогин посередині стержня.
З формули (12.9) видно, що Fкр пропорційна найменшій жорсткості стержня ЕІтіп, гак як очевидно, що прогин стержня відбувається завжди в площині найменшої жорсткості, яка перпендикулярна до осі z, відносно якої момент інерції поперечного перерізу стержня Iz = Imin. .
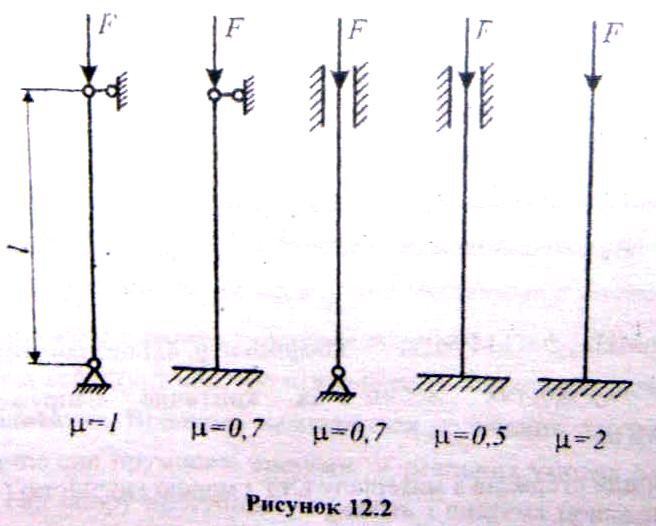
Для визначення критичної сили при інших способах закріплення кінців стержня треба знов інтегрувати рівняння (12.3) при відповідних граничних умовах. Наведемо формулу Ейлера без доведення для загального випадку
 (12.11)
(12.11)
де µl — зведена довжина стержня, а µ — коефіцієнт зведення довжини, який залежить від способу кріплення кінців стержня. На рис. 12.2 зображено способи кріплення кінців стержня, які найчастіше застосовують, і наведено значення µ.